

П2.4. Система управления уровнем жидкости
Существует некая система управления уровнем жидкости [13], принципиальная схема которой представлена на рисунке П2.11.
На рисунке: П – привод; РК – регулируемый клапан; РМ – расходомер; УМ – уровнемер; hз(t) – заданный уровень жидкости в резервуаре; h(t) – текущий уровень; ε(t) рассогласование; Gп, Gр – приток и расход жидкости.
Величину притока Gп можно менять посредством регулирования клапана РК, который управляется электроприводом П.
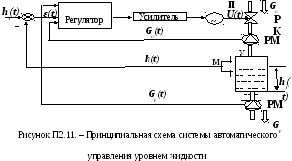
Уровнемером УР
измеряется действительный уровень h(t)
и сравнивается с требуемым уровнем
hз(t):
![]() .
.
При
![]() поддерживается заданный уровеньhз(t).
поддерживается заданный уровеньhз(t).
Изменение расхода Gр нарушает баланс в схеме, отсюда следует, что Gр является возмущающим сигналом.
Для повышения точности регулирования наряду с ε(t) используются сигналы Gп, Gр, которые порождают местные обратные связи.
При использовании Gр имеет место комбинированное регулирование по отклонению и возмущению.
П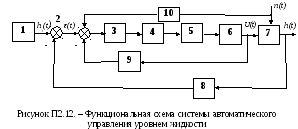 риведенной
принципиальной схеме соответствует
функциональная схема, приведенная на
рисунке П2.12.
риведенной
принципиальной схеме соответствует
функциональная схема, приведенная на
рисунке П2.12.
На рисунке обозначено: 1 – задающее устройство; 2- сравнивающее устройство; 3 – регулятор; 4 – усилитель мощности; 5 – привод; 6- регулирующий орган (клапан); 7 – объект управления; 8 – уровнемер; 9, 10 – расходомеры.
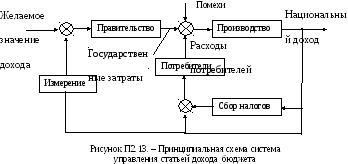
П2.5. Система управления экономическими параметрами
Рассмотрим составление схемы на примере системы управления экономическими параметрами.
Система управления статьей дохода бюджета в виде модели с обратной связью представлена на рисунке П2.13 [13].
Использованные источники
Аш Ж. и соавторы. Датчики измерительных систем: В 2-х книгах. Книга 1. Перевод с французского. – М: Мир, 1997. – 480 с.
Аш Ж. и соавторы. Датчики измерительных систем: В 2-х книгах. Книга 2. Перевод с французского. – М: Мир, 1997. – 424 с.
Балакирев В.С. и др. Экспериментальное определение динамических характеристик промышленных объектов управления. – М: Энергия, 1967. – 232 с.
Вентцель Е.С. Теория вероятностей: Учебник для вузов – М.: Высшая школа. 1999. – 576 с.
Гультяев А.К. MATLAB 5.2. Имитационное моделирование в среде Windows: Практическое пособие – Санкт-Петербург: Корона, 1999. – 286 с.
Егоренков Д.Л., Фрадков А.Л., Харламов В.Ю. Основы математического моделирования. Построение и анализ моделей с примерами на языке MatLab – Санкт-Петербург: БГТУ “Военмех”, 1996. – 188 с.
Земсков А.В. Теория, конструкция и основы проектирования систем управления. Раздел 1. Теория автоматического управления. - МО РФ: Михайловская военная артиллерийская академия, 2005. – 312 с.
Костогрызов А.И., Нистратов Г.А. Стандартизация, математическое моделирование, рациональное управление и сертификация в области системной и программной инженерии – М.: Изд-во ВПК и 3 ЦНИИ МО РФ. 2004. – 396 с.
Краснов Н.Ф. Аэродинамика. Учебник для ВТУЗов. - М: Высшая школа, 1971. – 632 с.
Лазарев Ю.Ф. MatLAB 5.x. – К: Издательская группа BHV, 2000. – 384 с.
Макаров И.М., Менский Б.М. Линейные автоматические системы (элементы теории, методы расчета и справочный материал). – М.: Машиностроение, 1982. – 504 с.
Медведев В.С., Потемкин В.Г. Control Sistem Toolbox. Matlab 5 для студентов. – М: Диалог МИФИ, 1999. – 456 с.
Методы классической и современной теории автоматического управления: Учебник в 5-ти томах; Т.1: Математические модели, динамические характеристики и анализ систем управления / Под ред. К.А. Пупкова, Н.Д. Егупова. – М: Издательство МГТУ им. Н.Э. Баумана, 2004. – 656 с.
Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов. Перевод с английского. – М: Мир, 1978. – 848 с.
Самарский А.А., Михайлов А.П. Математическое моделирование: Идеи. Методы. Примеры. – М.: ФИЗМАТЛИТ, 2002. – 320 с.
Седов Л.И. Методы подобия и размерности в механике. - М: Наука. Гл. ред. физ.-мат. лит., 1987. – 432 с.
Советов Б.Я., Яковлев С.А. Моделирование систем: Учеб. для вузов по специальности “Автоматизир. системы обработки информ. и упр.” – М: Высшая школа, 1998. – 319 с.: ил.
Сольницев Р.И. Автоматизация проектирования систем автоматического управления: Учеб. для вузов по специальности “Автоматика и управление в технических системах” – М: Высшая школа, 1991. – 335 с. : ил.
Черных И.В. SIMULINK: среда создания инженерных приложений / Под общ. Ред. к.т.н. В.Г. Потемкина. – М.: ДИАЛОГ-МИФИ. 2003. – 496 с.
Электротехника: Учебник для неэлектротехнических ВУЗов / Под редакцией Герасимова В.Г. – М: Высшая школа, 1985. – 480 с.
Г. Хан, С. Шапиро. Статистические модели в инженерных задачах. – М: Издательство “Мир”, 1969. 400 с.
Кашин В. М.
Новиков В. Г.