

8.3.2 Методы дискретизации аналоговых фильтров
Наиболее распространенными методами дискретизации аналогового фильтра с передаточной функцией вида (8.34) являются следующие:
- метод отображения дифференциалов;
- метод инвариантного преобразования импульсной характеристики;
- метод билинейного преобразования;
- метод согласованного z –преобразования.
8.3.2.1. Метод отображения дифференциалов
Это один из наиболее простых методов дискретизации. Заключается в замене дифференциалов в ее дифференциальном уравнении на конечные разности, что позволяет получить разностное уравнение, аппроксимирующее исходное дифференциальное уравнение.
При этом производится замена дифференциалов простыми разностями путем подстановки типа
![]() или
или
![]() (8.36)
(8.36)
и непосредственно
переходят от рациональной передаточной
функции от
![]() к рациональной передаточной функции
от
к рациональной передаточной функции
от![]() .
.
При этом, однако, характеристики аналогового фильтра не сохраняются. Поэтому данный метод применяется редко.
8.3.2.2. Метод инвариантного преобразования импульсной характеристики
Разложим передаточную функцию фильтра (8.34) на простые дроби
![]() ,
,
где
![]() - полюсы;
- полюсы;
![]() .
.
Переход от
![]() к
к![]() осуществляется с помощью отображения,
при котором используется замена
осуществляется с помощью отображения,
при котором используется замена
![]() .
(8.37)
.
(8.37)
8.3.2.3. Метод билинейного преобразования
При этом используется замена
![]() ,
(8.38)
,
(8.38)
что
приводит к связи между передаточными
функциями
![]() к
к![]()
![]() .
.
Это простое
конформное отображение
![]() -плоскости
в
-плоскости
в![]() -плоскость,
свободное от недостатков первого
метода и в то же время сохраняет удобную
алгебраическую форму преобразования.
-плоскость,
свободное от недостатков первого
метода и в то же время сохраняет удобную
алгебраическую форму преобразования.
8.3.2.4. Метод согласованного z –преобразования
При этом методе отображающая замена будет иметь вид
![]() .
(8.39)
.
(8.39)
Метод прост, но во многих случаях не применим из-за искажения во многих случаях положения нулей цифрового фильтра.
8.3.2.5. Универсальный метод
При переходе к
дискретному времени в передаточной
функции
![]() системы нужно произвести замену [6]
системы нужно произвести замену [6]
![]() .
(8.40)
.
(8.40)
Метод прост и дает быстрый результат.
8.3.3. Геометрическая интерпретация методов расчета цифровых фильтров по фильтрам непрерывного времени
Как отмечено выше, определение параметров цифрового фильтра осуществляется путем пересчета параметров непрерывного фильтра.
И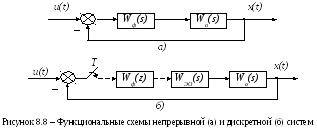 дея
такой замены можно пояснить рис. 8.8.
Здесь замкнутая система с непрерывным
объектом управленияc
передаточной функцией W0(s)
и синтезированным непрерывным фильтром
с передаточной функцией Wф(s)
(рис. 8.8, а) преобразовывается в
систему с цифровым фильтром Wф(z)
и фиксатором вычислений ЦАП с передаточной
функцией
дея
такой замены можно пояснить рис. 8.8.
Здесь замкнутая система с непрерывным
объектом управленияc
передаточной функцией W0(s)
и синтезированным непрерывным фильтром
с передаточной функцией Wф(s)
(рис. 8.8, а) преобразовывается в
систему с цифровым фильтром Wф(z)
и фиксатором вычислений ЦАП с передаточной
функцией
![]() (рис. 8.8, б).
(рис. 8.8, б).
Преобразование базируется на представлении интеграла суммой. Эта сумма может быть вычислена различными способами.
Прямой метод Эйлера.
П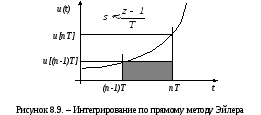 рямой
метод Эйлера демонстрируется рис. 8.8.
рямой
метод Эйлера демонстрируется рис. 8.8.
Значение выходного сигнала x(t) в момент t=nT здесь находится из выражения
![]() .
(8.41)
.
(8.41)
При подстановке оператора задержки (см. (8.31)) в выражение (8.41) получим:
![]() .
(8.42)
.
(8.42)
Из (8.42) следует, что сигнал на выходе может быть представлен в виде:
![]() .
(8.43)
.
(8.43)
Таким
образом, при использовании прямого
метода Эйлера осуществляется замена
переменной оператора интегрирования
![]() через оператор задержки
через оператор задержки![]() .
Соответствующее выражение замены имеет
вид:
.
Соответствующее выражение замены имеет
вид:
![]() .
или
.
или
![]() . (8.44)
. (8.44)
Из рассмотрения выражения (8.44) следует, что оно совпадает с выражением (8.40) для универсального метода дискретизации.
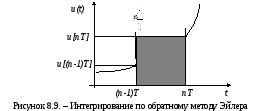
Обратный метод Эйлера.
Данный метод иллюстрируется рис. 8.10.
Значение выходного сигнала x(t) в момент t=nT здесь находится из выражения
![]() .
(8.45)
.
(8.45)
При подстановке оператора задержки получим
![]() .
(8.46)
.
(8.46)
Отсюда следует, что сигнал на выходе может быть представлен в виде
![]()
 .
(8.47)
.
(8.47)
Таким образом, при этом методе осуществляется замена переменных следующим образом
![]()
 .
или
.
или
![]() . (8.48)
. (8.48)
Выражение (8.48) совпадает с выражением (8.36), т. е. обратный метод Эйлера иллюстрирует метод отображения дифференциалов.
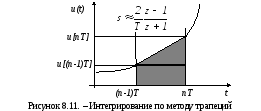
Метод трапеций.
Интегрирование по данному методу иллюстрируется рис. 8.11.
Значение выходного сигнала x(t) в момент t=nT здесь находится из выражения
![]() .
(8.49)
.
(8.49)
После подстановки оператора задержки в выражение (8.49) получим сигнал на выходе, который определится по зависимости:
![]() .
(8.50)
.
(8.50)
В
этом случае аналогом оператора
интегрирования
![]() является оператор,
является оператор,
![]() или
или
![]() ,
(8.51)
,
(8.51)
который соответствует выражению метода билинейного преобразования (8.38).
Очевидно, что данное преобразование обеспечивает более высокую точность замены, сохраняя характеристики аналогового фильтра. Это вытекает из геометрической интерпретации метода: замена элемента площади под непрерывной кривой трапецией (в последнем случае) обеспечивает более высокую точность такой замены прямоугольниками (в случаях прямого и обратного методов Эйлера).
В силу сказанного метод билинейного преобразования является предпочтительным.
Таким образом, если известна операторная передаточная функция непрерывного фильтра, то, используя различные методы численного интегрирования, можно определить передаточную функцию цифрового фильтра.
При этом необходимо заметить, что последняя зависит не только от способа численного интегрирования, но и от значения периода дискретизации Т.