

8.2. Основные положения из теории дискретных линейных систем
Теория дискретных линейных систем связана с описанием и обработкой временных и частотных последовательностей.
Будем рассматривать частный случай, как наиболее распространенный, когда квантование элементов последовательности по уровню отсутствует (при общей теории дискретных систем, где квантование производится как по времени, так и по уровню).
8.2.1. Последовательности
Дискретный сигнал определяется лишь для дискретных значений независимой переменной – времени t.
Обычно время квантуется равномерно, т.е.
![]() ,
(8.1)
,
(8.1)
где
![]() - интервал между отсчетами.
- интервал между отсчетами.
Математически дискретные сигналы представляются в виде непрерывной последовательности чисел.
Для описания может быть использовано одно из следующих обозначений:
![]() ;
;
![]() (8.2)
(8.2)
![]() ;
;
![]() (8.3)
(8.3)
![]() ;
;
![]() (8.4)
(8.4)
![]() ;
;
![]() (8.5)
(8.5)
Способы обозначения (8.2) и (8.4) используются при неравномерном расположении отсчетов, а (8.3) и (8.5) – при равномерном.
Примеры важных последовательностей.
1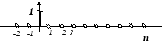 .Цифровой
единичный импульс
- основная последовательность
.Цифровой
единичный импульс
- основная последовательность
![]()
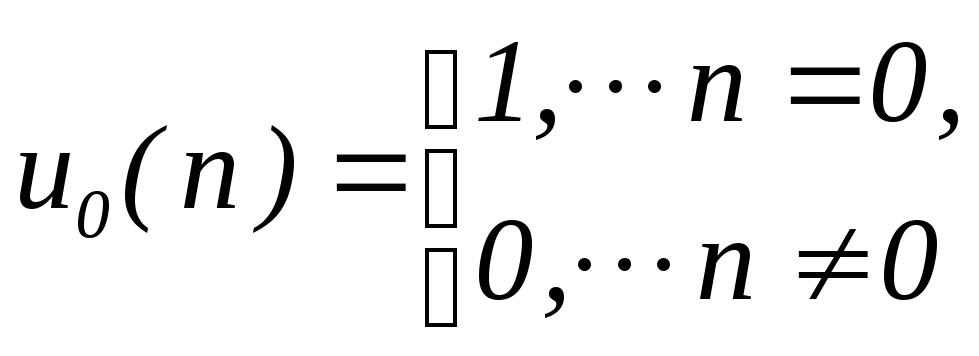 (8.6)
(8.6)
Этот
импульс аналогичен единичному импульсу
![]() в аналоговых системах.
в аналоговых системах.
Отличие между ними:
![]() -
физически реализуемый
сигнал;
-
физически реализуемый
сигнал;
![]() -
обобщенная
функция (или распределение).
-
обобщенная
функция (или распределение).
2. Единичный импульс,
задержанный
на
![]() отсчетов
отсчетов![]() :
:
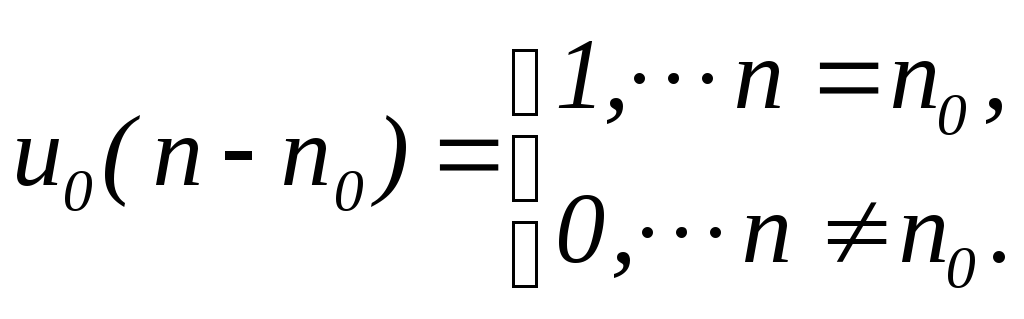
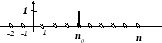 (8.7)
(8.7)
3. Единичный скачок
![]() :
:
 (8.8)
(8.8)
Существует связь между единичным скачком и единичным импульсом:
![]() .
(8.9)
.
(8.9)
4. Экспонента
![]() :
:
 (8.10)
(8.10)
5. Косинусоида
![]() :
:
![]() . (8.11)
. (8.11)
П роизвольные
последовательности легко выражаются
через основные последовательности
(единичный импульс, используязадержку
и масштабирование):
роизвольные
последовательности легко выражаются
через основные последовательности
(единичный импульс, используязадержку
и масштабирование):
если
![]() ,
,
то эту последовательность, используя (8.7), можно представить
![]() . (8.12)
. (8.12)
8.2.2. Линейные системы с постоянными параметрами
Дискретная система по существу является алгоритмом преобразования одной последовательности (входной) в другую (выходную)
![]() ,
,
где
![]() - оператор, его вид зависит от свойств
конкретной системы.
- оператор, его вид зависит от свойств
конкретной системы.
С оответствующая
схема может быть представлена в виде,
приведенном на рисунке 8.1.
оответствующая
схема может быть представлена в виде,
приведенном на рисунке 8.1.
8.2.2.1. Определение линейной системы
Если
![]()
![]() ,
,![]() - входные последовательности,
- входные последовательности,![]() ,
,![]() - выходные последовательности, и
- выходные последовательности, и![]() - константы, то в линейной системе имеет
место
- константы, то в линейной системе имеет
место
![]()
![]() .
(8.13)
.
(8.13)
8.2.2.2. Определение системы с постоянными параметрами
Если
![]() - входная последовательность и
- входная последовательность и![]() - соответствующая выходная
последовательность, то входной
последовательности
- соответствующая выходная
последовательность, то входной
последовательности![]() при любых
при любых![]() соответствует на выходе последовательность
соответствует на выходе последовательность![]() .
.
В линейной системе с постоянными параметрами входная и выходная последовательности связаны соотношением типа свертки.
Пусть
![]() - входная
последовательность;
- входная
последовательность;
![]() - соответствующая
выходная последовательность;
- соответствующая
выходная последовательность;
![]() -
отклик системы на единичный импульс
(импульсная характеристика системы).
-
отклик системы на единичный импульс
(импульсная характеристика системы).
Используя
(8.12),
![]() можно последовательность представить
можно последовательность представить
![]() .
.
Поскольку
![]() - отклик системы на последовательность
- отклик системы на последовательность![]() ,
а
,
а
параметры
системы постоянны, то
![]() - есть отклик на последовательность
- есть отклик на последовательность![]() .
.
Из
свойств линейности следует, что
откликом на последовательность
![]() должна быть последовательность
должна быть последовательность![]() .
Поэтому отклик на
.
Поэтому отклик на![]() будет
будет
![]() .
(8.14)
.
(8.14)
Он имеет вид свертки, что и доказать.
Простой заменой переменных выражение (8.14) может быть преобразовано к виду
![]()
 .
(8.15)
.
(8.15)
Это может быть отражено схемой