

5. Динамические свойства воспринимающих элементов и датчиков
5.1. Основные определения и понятия
5.1.1. Понятие датчика
Физическая величина m, характеризующая объект измерений (температуру, давление, и др.), называется измеряемой величиной [1, 2].
Датчик
– это
устройство, которое, подвергаясь
воздействию физической измеряемой
величины
m,
выдает эквивалентный сигнал
![]() ,
обычно электрической природы, являющийся
функцией измеряемой величины (см. рисунок
5.1).
,
обычно электрической природы, являющийся
функцией измеряемой величины (см. рисунок
5.1).
Х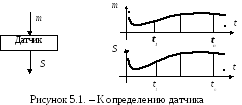 арактеристика
такого преобразованияможет
быть в формальном виде представлена
соотношением
арактеристика
такого преобразованияможет
быть в формальном виде представлена
соотношением
![]() (5.1)
(5.1)
где
![]() -
выходная величина датчика;
-
выходная величина датчика;
![]() - входная величина.
- входная величина.
Для
всех датчиков характеристика
преобразования
- соотношение (5.1) – в
численной форме определяется
экспериментально
в результате
градуировки,
что позволяет построить градуированную
кривую. Для этого при известных значениях
физической величины m
снимают
соответствующие показания датчика:
![]() и строят зависимость
и строят зависимость![]() .
.
Р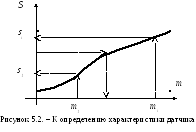 исунок
5.2 поясняет алгоритм получения
характеристики преобразования датчика.
исунок
5.2 поясняет алгоритм получения
характеристики преобразования датчика.
А
по известной характеристике датчика
![]() и его показаниям легко получить значения
физической величины:
и его показаниям легко получить значения
физической величины:![]()
На
практике стремятся, чтобы существовала
линейная
зависимость
между малыми приращениями выходной
![]() и входной
и входной![]() величин да датчика
величин да датчика
![]() .
(5.2)
.
(5.2)
Здесь
![]() - чувствительность датчика. Обеспечение
линейности означает
- чувствительность датчика. Обеспечение
линейности означает![]() .
.
В
общем случае на практике обеспечение
постоянства
![]() является проблемой.
является проблемой.
5.1.2. Классификация датчиков
Датчики с точки зрения вида сигнала на выходе могут быть:
активными – генератором, выдающим заряд, напряжение или ток, либо
пассивными – с выходным сопротивлением, индуктивностью или емкостью, изменяющимися в соответствии с входной величиной.
Активные датчики
Принцип действия активного датчика основан на том или ином физическом явлении, обеспечивающем преобразование измеряемой величины в электрическую форму.
В таблице 5.1 приведены физические эффекты, наиболее часто используемые для построения активных датчиков.
Таблица 5.1. Измеряемые датчиками величины и физические эффекты, используемые при построении активных датчиков
|
Измеряемая величина |
Используемый эффект |
Выходная величина датчика |
|
Температура |
Термоэлектрический эффект (термопара) |
Напряжение |
|
Сила, давление, ускорение |
Пьезоэлектрический эффект |
Заряд |
|
Скорость |
Электромагнитная индукция |
Напряжение |
Вкратце рассмотрим перечисленные в таблице эффекты.
1. Термоэлектрический эффект
Схема, поясняющая этот эффект, представлена на рисунке 5.3.
Н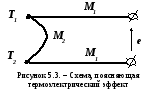 а
рисункеM1,
M2
– два
проводника различного химического
состава; их спаи, находящиеся при
температурах T1,
T2,
являются местом возникновения термо-э.д.с.
e:
e
= e
(T1,
T2).
Термо-э.д.с. пропорциональна измеряемой
разнице температур (T1
- T2):
e
e
(T1
- T2).
а
рисункеM1,
M2
– два
проводника различного химического
состава; их спаи, находящиеся при
температурах T1,
T2,
являются местом возникновения термо-э.д.с.
e:
e
= e
(T1,
T2).
Термо-э.д.с. пропорциональна измеряемой
разнице температур (T1
- T2):
e
e
(T1
- T2).
2. Пьезоэффект
Пьезоэффект
проявляется в том, что при изменении
механического напряжения в кристалле
пъезоэлектрика, например, кварца (см.
рисунок 5.4) под действием приложенной
к нему силы
F
приводит к деформации, которая вызывает
появление на противолежащих поверхностях
кристалла одинаковых по величине
электрических зарядов противоположного
знака, и, следовательно, появление
электрического напряжения
v:
![]() .
.
П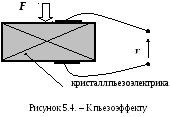 ри
этом существует очевидное соотношениеv
F.
ри
этом существует очевидное соотношениеv
F.
Таким образом, измерение силы F или приводимых к ней величин (давление, ускорение) осуществляется измерением напряжения v между зажимами пьезоэлектрика.
3. Эффект электромагнитной индукции
Я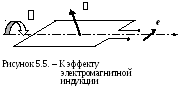 вление
электромагнитной индукции заключается
в том, что при перемещении проводника
в постоянном электромагнитном поле с
вектором магнитной индукции возникает
э.д.с.e
, пропорциональная магнитному потоку,
и, следовательно, скорости перемещения.
Соответствующая схема, поясняющая
данный эффект, приведена на рисунке
5.5, где
- скорость
вращения проводящего контура.
вление
электромагнитной индукции заключается
в том, что при перемещении проводника
в постоянном электромагнитном поле с
вектором магнитной индукции возникает
э.д.с.e
, пропорциональная магнитному потоку,
и, следовательно, скорости перемещения.
Соответствующая схема, поясняющая
данный эффект, приведена на рисунке
5.5, где
- скорость
вращения проводящего контура.
Зависимость
между скоростью ,
магнитной
индукцией B
и э.д.с. e
может
быть получена из выражения
![]() .
.
Пассивные датчики
В пассивных датчиках некоторые параметры выходного импеданса могут меняться под воздействием измеряемой величины.
Импеданс датчика, с одной стороны, обусловлен геометрическими размерами его элементов, а с другой – свойствами материалов: удельным сопротивлением , магнитной проницаемостью , и диэлектрической постоянной
В таблице 5.2 приведены физические принципы преобразования величин и материалы, используемые для построения пассивных датчиков.
Таблица 5.2. Физические принципы преобразования величин и материалы, используемые для построения пассивных датчиков
|
Измеряемая величина |
Электрическая характеристика, изменяющаяся под действием измеряемой величины |
Тип используемых материалов |
|
Температура |
Сопротивление |
Металлы, полупроводники |
|
Деформация |
Сопротивление |
Сплавы никеля, легированный кремний |
|
Перемещение |
Сопротивление |
Магниторезистивные материалы |
|
Плотность |
Сопротивление |
Хлористый литий, окись алюминия |
Импеданс пассивного датчика и его изменения можно измерить не иначе, как включая датчик в специальную электрическую схему, содержащую источник питания и схему формирования сигнала.
Комбинированные датчики
При измерениях некоторых неэлектрических величин не всегда удается преобразовать их непосредственно в электрическую величину.
В этих случаях осуществляется двойное преобразование исходной (первичной) измеряемой величины в промежуточную, которую затем преобразуют в электрическую.
Б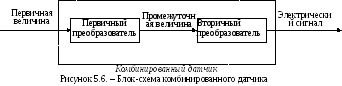 лок
схема комбинированного датчика в общем
случае можно представить в виде,
приведенном на рисунке 5.6.
лок
схема комбинированного датчика в общем
случае можно представить в виде,
приведенном на рисунке 5.6.