

3. Математическое моделирование
3.1. Задачи и цели исследования математических моделей
Под математической моделью (ММ) обычно понимается отображение реального объекта с помощью системы математических соотношений.
Необходимость математического моделирования возникает по следующим причинам.
При необходимости осуществления экономичного поиска рациональной системы, сложный характер которой не может быть выявлен в лабораторных условиях. или на масштабной (физической) модели.
При необходимости проверки справедливости (достоверности) системы моделирующих уравнений, применяемых в системах управления.
При необходимости оценки реакции системы на комплекс регулирующих воздействий при выявлении оптимальных управлений, также при выборе альтернативных решений динамики системы.
Математическое моделирование позволяет снизить объем испытаний и осуществляет следующие действия:
Решение таких проектных задач, как анализ функционирования системы, ее устройств и элементов.
Исследование влияния изменения параметров и возмущающих воздействий на стабильность характеристик САУ; выбор структурной схемы САУ по задаваемым проектировщиком критериям.
Оценка устойчивости системы, оценка динамических и статических ошибок для различных значений параметров выбранной структурной схемы.
Правильно спроектированная ММ отражает характеристики моделируемого процесса.
При этом границы эффективного моделирования полностью определяются теми допущениями, которые были приняты при проектировании модели.
При этом, во-первых, необходимо иметь полный и хорошо определенный перечень допущений, на которых строится модель. А во-вторых, необходимо определить их влияние на результат моделирования, определить доминирующие воздействия.
В основе аналитики любых процессов лежат фундаментальные законы природы, вариационные принципы и др.
3.2. Методология математического моделирования. Системный анализ
3.2.1. Понятие системы
Базовым понятием математического моделирования является понятие системы.
Система в широком
смысле – эквивалент понятия математической
модели [6] и задается парой множеств
![]() (
(![]() -
множество входов,
-
множество входов,![]() - множество выходов) и отношением на
- множество выходов) и отношением на![]() ,
формализующем связь (зависимость) между
входами и выходами.
,
формализующем связь (зависимость) между
входами и выходами.
Системе присущи следующие атрибуты (свойства):
1. Целостность (единство). Это означает, что система отделена от внешней среды; среда может оказывать на нее действие через входы и воспринимать отклик (реакцию) на эти действия через выходы.
2. Структуированность. Означает, что система разделена внутри на несколько подсистем, связанных и взаимодействующих между собой так же, как целая система взаимодействует с внешней средой.
3. Целенаправленность. Данное свойство требует задания некоторой цели, достижение которой говорит о правильной работе системы.
Под приведенное формальное определение системы подпадают практически все виды математических моделей систем.
К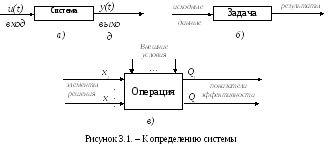 ак
систему можно трактовать любой
преобразователь входных данных в
выходные (“черный ящик”) (рисунок 3.1,а).
ак
систему можно трактовать любой
преобразователь входных данных в
выходные (“черный ящик”) (рисунок 3.1,а).
Системой можно назвать процесс решения задачи. При этом входами будут являться исходные данные, выходами – результаты, а целью - правильное решение (рисунок 3.1, б). Такой подход к системе подчеркивает ее целенаправленность и ведет свое происхождение от исследования операций – научной дисциплины, занимающейся разработкой количественных методов обоснования решений. Основное понятие здесь - операция: действие, которое подвергается исследованию (проектирование, управление, экономическая деятельность и т.д.).
Операция соответствует некоторой системе. Входами этой системы являются элементы принимаемого решения о проводимой операции, выходами - результаты проведения операции (показатели ее эффективности (рисунок 3.1, в)).
Необходимо отметить,
что функционирование системы – это
процесс, разворачивающийся во времени,
т.е. множества возможных входов и выходов
![]() - это множества функций времени со
значениями соответственно в множествах
- это множества функций времени со
значениями соответственно в множествах![]() :
:
![]() ,
,
где
![]() - множество моментов времени, на котором
рассматривается система.
- множество моментов времени, на котором
рассматривается система.
Система
называется функциональной
(определенной),
если каждой входной функции
![]() соответствует единственная выходная
функция
соответствует единственная выходная
функция![]() .
.
Иначе система называется неопределенной. Неопределенность обычно возникает из-за неполноты информации о внешних условиях работы системы.
Важным
свойством , присущим реальным системам
, является причинность.
Она означает,
что если входные функции
![]() и
и![]() совпадают при
совпадают при![]() ,
т.е.
,
т.е.![]() при
при![]() ,
то соответствующие выходные функции
удовлетворяют условию
,
то соответствующие выходные функции
удовлетворяют условию![]() ,
т.е. “настоящее не зависит от будущего
при заданном прошлом”.
,
т.е. “настоящее не зависит от будущего
при заданном прошлом”.
Числовые величины, связанные с системой, делятся на переменные и параметры.
Параметры – это величины, которые можно считать постоянными на промежутке времени рассмотрения системы. Остальные числовые величины являются переменными.
Значения переменных и параметров определяют количественную информацию о системе. Оставшаяся информация, т.е. качественная, определяет структуру системы. Следует отметить, что различие между параметрами и переменными, а также между параметрами и структурой может быть условным, однако оно полезно в методическом отношении.