

SYNTHEZ / SYNTH_22
.DOC
Кинематическая схема 22
|
Рис. 22.1 |

длина кривошипа OA;
параметры,
определяющие положение добавочной
точки C
на шатуне - размер AC
и угол
![]() ;
;
параметр e - смещение горизонтальной направляющей для ползуна 3;
соотношение размеров звеньев AB и OA
![]() (22.1)
(22.1)
(параметр b задан как диапазон).
Необходимо
подобрать координаты центра E
вращения звена 5 (размеры a
и b)
так, чтобы оно за цикл работы механизма
совершало полный оборот; размеры CD
и DE
выбрать такими, чтобы угол передачи
![]() имел наименьшие возможные отклонения
от
имел наименьшие возможные отклонения
от
![]() .
.
Решение
Размер AB находим из соотношения (22.1).
|
Рис. 22.2 |
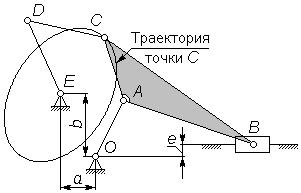
Для подбора приемлемых значений a и b можно воспользоваться графическим методом: в подходящем масштабе вычерчивают траекторию точки C (замкнутую центральную кривую четвертого порядка) и находят ее центр - точку E; координаты a и b определяют замером.
Можно
также воспользоваться компьютерной
средой САМАС; для этого устанавливают
за цикл движения механизма пределы
изменения координат точки C
–
![]() ,
,
![]() ,
,
![]() ,
,
![]() и тогда координаты
точки E
и тогда координаты
точки E
 (22.2)
(22.2)
Значения a и b найдутся как разности координат точек O и E:
 (22.3)
(22.3)
Для
выбора длин звеньев CD
и DE
нужно найти предельные значения
расстояния CE,
т.е.
![]() и
и
![]() (это можно сделать с помощью измерений
на плане положений механизма).
(это можно сделать с помощью измерений
на плане положений механизма).
Текущие значения расстояния CE и угла g для произвольного положения механизма связаны с длинами звеньев CD и DE формулой
![]() ;
(22.4)
;
(22.4)
если
обозначить буквой d
значение
наибольшего отличия угла g
от
![]() ,
то будут верны равенства
,
то будут верны равенства
![]() ;
;
![]() (22.5)
(22.5)
и тогда для определения длин CD и DE можно использовать уравнения
 (22.6)
(22.6)
Можно показать, что система (22.6) разрешима только при
 .
(22.7)
.
(22.7)
Если
принять
![]() ,
то искомые длины звеньев будут равны
,
то искомые длины звеньев будут равны
![]() ;
(22.8)
;
(22.8)
при любом другом значении угла d, удовлетворяющем неравенству (22.7), получим два решения, симметричных друг другу: обозначим
 ,
(22.9)
,
(22.9)
 ;
(22.10)
;
(22.10)
если принять, что CD>DE , то решение системы (22.6)
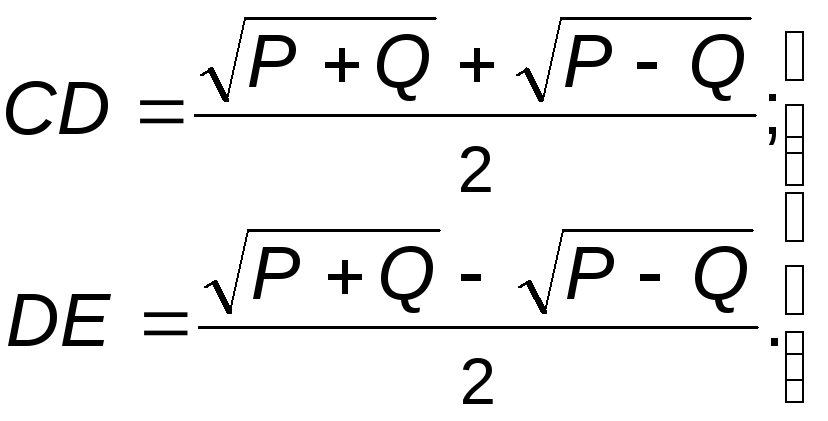 (22.11)
(22.11)
При CD<DE правые части формул (22.11) для расчета CD и DE меняются местами, т. е.
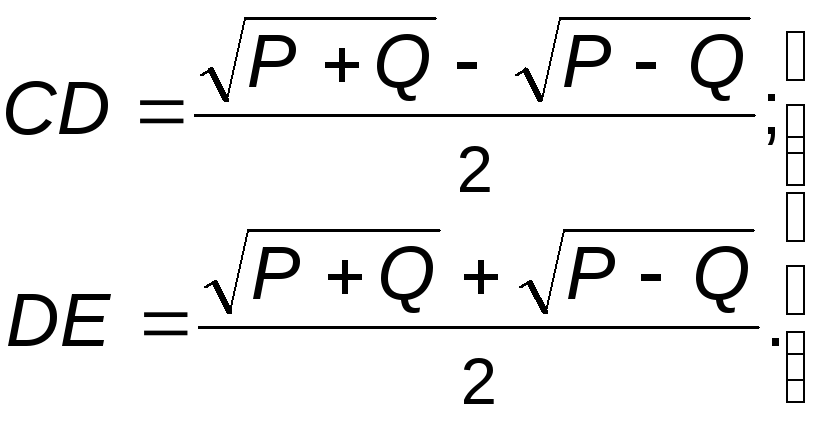 (22.12)
(22.12)
Отметим, что цикл работы этого механизма не содержит периода холостого хода, т. к. вращение рабочего звена совершается непрерывно в одном и том же направлении.