

17.Демодуляция манипулированных сигналов.

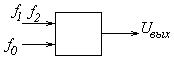
1. Частотный детектор


При f1>f0сигнал проходи через верхнюю цепочку. Напряжение на нагрузкеU=+U0.
При f1<f0напряжение на нагрузкеU=-U0.
Цифровой частотный компаратор:
2. фазовый детектороснован не перемножении двух сигналов.

UC=U1cos∙(ωt+φ)
UГ=U2cosωt
Uвых=UДcosφ
UГ=±UД – при изменении фазы от0 доπ.
Пороговый элемент на ОУ:


Структурная схема при двухступенчатой частотной демодуляции:

ЧД – 2 – пороговый элемент.
На первом этапе демодуляции выделяется частота поднесущей. На втором – исходное информационное сообщение.
UД=U0cos(2πF1t) – «1»
UД=U0cos(2πF1t) – «0»
18.Импульсная модуляция – это модуляция колебаний, в результате которой гармонические колебания приобретают вид кратковременных радиоимпульсов, характеристики которых определяются формой модулирующего колебания.
Импульсная модуляция широко применяется в радиолокации. При этом передаваемый сигнал может изменять различные параметры исходящей последовательности радиоприемников. Если высоту, то получаем амплитудную ИМ, если частоту – ЧИМ, смещение импульсов во времени без изменения длительности импульсов – ФИМ.
Схема импульсного модулятора:
![]()

ПИЭ – первичный источник энергии;НЭ– накопительный элемент (могут быть емкостные, индуктивные, смешанные);КЭ– коммутирующий элемент (жесткого и мягкого типа);
СВЧ-Г – СВЧ – генератор.
Так как скважность приходящих радиоимпульсов большая, есть возможность накаливать энергию в паузе между импульсами, что понижает мощность ПИЭ.
Схема модулятора жесткого типа с емкостным накопителем:

1 фаза: при отсутствии импульса транзистор VT1 закрыт отрицательным напряжением на базе. Происходит заряд конденсатора по экспоненциальному закону:
UC=E0∙ (1-e-t/T3) T3=(R1+R2)C.
2 фаза: Приходит положительный импульс, который открываетVT1 и происходит разряд конденсатора через СВЧ – генератор:UC=E0∙ e-t/Tр Tр=(Rкл+Rген)C.
Rкл – сопротивление ключа (отрицательное). ДиодVD1 необходим ля того, чтобы гасить колебания, возникающие при коммутации больших токов.
Линейно-частотная модуляция
(ЛЧМ):отличается от обычных радиоимпульсов
тем, что ВЧ заполнение имеет переменную
частоту, изменяющуюся по линейному
закону:![]() ,
гдеТ – длительность ЛЧМ сигнала
,
гдеТ – длительность ЛЧМ сигнала

![]() .
.
Свойства ЛЧМ сигнала – возможность сжатия его во времени. Устройство сжатия осуществляет задержку сигнала, подаваемого на вход, причем время задержки уменьшается с увеличением частоты проходящего сигнала. Произойдет сжатие и на выходе устройства задержки одновременно появятся ВЧ и НЧ составляющие сигнала.
Это свойство применяется в радиолокации. Позволяет повысить точность в определении дальности объекта без ухудшения точности
19.Фильтрация – это любое преобразование измерительных сигналов с целью изменения соотношения их спектральных составляющих.
При фильтрации решаются две основные задачи:
выделение полезного сигнала на фоне помех;
спектральный анализ.
Классификация фильтрации:
По роду преобразований:
аналоговая;
цифровая.
По расположению полосы пропускания (ПП):
низкочастотная;
высокочастотная;
полосовая;
заграждающая (режекторная).
Ф ильтр
низких частот: Фильтр высоких частот:
ильтр
низких частот: Фильтр высоких частот:

Полосовой фильтр: Заграждающий фильтр:


По типу использования динамических систем:
линейная;
нелинейная.
Линейная фильтрация используется чаще, так как любой измерительный сигнал может быть представлен математической моделью случайный гауссовых процессов, для которых линейная фильтрация обеспечивает возможность выделения информативного сигнала на фоне помех.
Нелинейная фильтрация используется для подавления импульсных помех.
По устройству или физическому принципу работы фильтры различают:
реактивные сосредоточенного типа (L, C). Рабочий диапазон ограничен до300 МГц.
реактивные распределенного типа (волноводы, лини с распределенными параметрами). Рабочий диапазон свыше 300 МГц.
кристаллические (используется пьезоэффект). Достоинства таких фильтров – это высокая добротность цепи и высокая стабильность, так как электрические параметры кристалла мало завися от времени и температуры изменений. Рабочий диапазон частот ограничивается технологическими возможностями на стадии изготовления – от 1 кГц до500 кГц.
Активные (сроятся на основе операционных усилителей). Рабочий диапазон частот– от 0 до500 кГц.
цифровые (на основе цифровой техники и микропроцессоров).
Основные характеристики фильтров:

![]()
![]() ,
где
,
где
п – порядок фильтра.
p=j∙ω
![]()
h(t) – импульсная характеристика.
Из формулы видно, что частотный коэффициент передачи фильтра связан с его импульсной характеристикой через преобразование Фурье:

где Х– крутизна АЧХ – величина, не зависящая от масштаба координат и измеряется вдБ/дек, если изменение частоты происходит в 10 раз, и в дБ/октаву, если в 2 раза.