

Metodichka_TAU
.pdfглавному пакету расширения системы MATLAB-Simulink, такие как
«DSP», «Fixed-Point», «Nonlinear control design» и «Power systems».
В разделе Extension Simulink имеется ряд средства, предназначенных для моделирования в реальном масштабе времени и событийноуправляемом моделировании.
5. Моделирование передаточных функций в MATLAB
В пакете MATLAB имеется два основных варианта для исследования передаточных функций и моделирования САУ:
-использование команд пакета расширения Control System Toolbox;
-использование пакета Simulink.
Control System Toolbox предназначен для работы с LTI-моделями систем управления.
Команда, создающая LTI-систему с одним входом и одним выходом в виде передаточной функции, имеет следующий синтаксис:
tf ([bmbm 1 b1b0 ],[anan 1 ,a1a0 ]),
где bm , bm 1, , b1,b0 и an , an 1, , a1, a0 – значения коэффициентов
полиномов В и А в (3).
Например, если требуется описать ПФ вида:
W |
s 1 |
|
|
||
2s2 8s 5 |
||
|
и узнать значения ее нулей и полюсов, то нужно ввести в окне команд MatLab следующие команды:
>>w=tf([1 1],[2 8 5])
>>zero(w)
>>pole(w)
Исследовать реакцию LTI-модели на типовые входные воздействия можно с помощью команд:
>>step(w)
>>impulse(w)
Можно получить на одном графике реакцию сразу нескольких динамических звеньев, если использовать команды вида:
>>step(w, w1, w2)
>>impulse(w, w1 ,w2)
11
В приведенных примерах время моделирования выбирается автоматически. При необходимости его можно явно указать в команде
>>step(w, w1, w2,t)
где t - время моделирования в секундах.
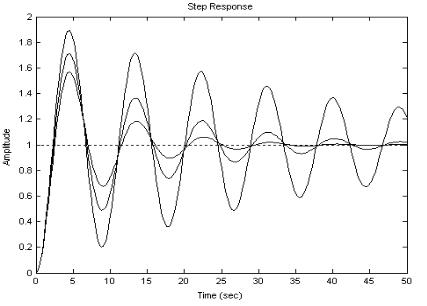
Рис. 1. Исследование реакции колебательного звена
На рис. 1 показан пример моделирования динамики колебательного звена при различных параметрах:
>>w=tf([1],[2 0.3 1]);
>>w1=tf([1],[2 0.5 1]);
>>w2=tf([1],[2 0.1 1]);
>>step(w,w1,w2,50)
В Simulink ПФ можно описать с помощью блока Transfer Fcn в разделе библиотеки Continuous. Для подачи типовых воздействий надо использовать блок Step из раздела Sources. Импульсную переходную характеристику звена можно получить, подавая на вход импульс маленькой длительности и большой амплитуды (приближение δ-функции) при нулевых начальных условиях.
6. Задание на лабораторную работу
С помощью пакета MATLAB построить реакцию каждого типового звена с параметрами своего варианта (см. табл. 2) на ступенчатое и импульсное входное воздействие. Определить влияние коэффициентов, входящих в описание каждого звена на параметры переходного процесса. Вариант задания назначается преподавателем.
12

Таблица 2
Варианты заданий
№ |
Апери- |
Апериодич. звено |
Ин- |
Изодр. |
Реальное |
Инерц.- |
|
||||||
|
од. зве- |
2 пор. (колеб. |
тегр. |
звено |
диф. звено |
форс. |
|
||||||
|
но |
|
звено) |
|
звено |
|
|
|
|
звено |
|
||
|
K |
T |
K |
T2 (T) |
T1( ξ ) |
K |
K |
T |
K |
T |
K |
T0 |
T1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
3 |
0,2 |
3 |
0,2 |
2,0 |
3 |
3 |
0,5 |
3 |
0,4 |
3 |
2 |
0,8 |
|
|
|
|
|
(0,2) |
|
|
|
|
|
|
|
|
2 |
4 |
0,3 |
4 |
0,3 |
1,5 |
4 |
4 |
1 |
4 |
0,3 |
4 |
3 |
1,2 |
|
|
|
|
|
(0,15) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
5 |
0,4 |
5 |
0,4 |
2,5 |
5 |
5 |
0,8 |
5 |
0,5 |
5 |
4 |
1,5 |
|
|
|
|
|
(0,25) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
6 |
0,5 |
6 |
0,5 |
1,6 |
6 |
6 |
2 |
6 |
1,0 |
6 |
5 |
2,0 |
|
|
|
|
|
(0,3) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
7 |
0,6 |
7 |
0,6 |
2,8 |
7 |
7 |
3 |
7 |
0,8 |
7 |
6 |
2,0 |
|
|
|
|
|
(0,2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
8 |
0,7 |
8 |
0,7 |
2,2 |
8 |
8 |
3,5 |
8 |
1,0 |
8 |
7 |
2,0 |
|
|
|
|
|
(0,08) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
9 |
0,8 |
9 |
0,8 |
2,1 |
9 |
9 |
1 |
9 |
0,9 |
9 |
8 |
3,0 |
|
|
|
|
|
(0,07) |
|
|
|
|
|
|
|
|
8 |
10 |
1,0 |
10 |
1,0 |
3,0 |
10 |
10 |
2,0 |
10 |
2,0 |
10 |
10 |
4,0 |
|
|
|
|
|
(0,1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7. Методика выполнения задания
Порядок выполнения работы:
1.Задать передаточные функции типового динамического звена, используя параметры, приведенные в табл. 2, используя номер компьютера как номер варианта.
2.Построить реакцию типового звена на ступенчатое и импульсное входные воздействия.
3.Увеличить в два раза значение каждого из параметров по очереди и выполнить пп. 1-2.
4.Уменьшить в два раза значение каждого из параметров по очереди и выполнить пп. 1-2.
5.Построить переходные процессы на одном графике разным
цветом.
6.Выполнить пп. 1-5 для всех типовых звеньев, приведенных в
табл.2.
7.Подготовить ответы на контрольные вопросы.
13
8. Требования к содержанию и оформлению отчета
Отчет по лабораторной работе должен содержать: а) титульный лист;
б) передаточные функции и схемы моделирования исследуемых звеньев;
в) экспериментально полученные характеристики при вариации параметров каждого звена;
г) выводы, обобщающие проделанные эксперименты по каждому звену;
д) ответы на контрольные вопросы.
Контрольные вопросы
1.Что называется передаточной функцией?
2.Что называется переходной и импульсной (весовой) функциями? Какова связь между ними?
3.Как, пользуясь временными характеристиками, определить параметры (коэффициенты передаточной функции) звена? Пояснить на конкретных примерах.
4.Перечислите динамические характеристики САУ.
5.Что называется характеристическим уравнением?
14
Лабораторная работа №2
ПРЕОБРАЗОВАНИЯ СТРУКТУРНЫХ СХЕМ
1. Цель работы
Целью работы является изучение структурных преобразований и нахождения передаточных функций с использованием автоматизированных средств моделирования на ПК – MATLAB, SIMULINK.
2. Задачи работы
–Закрепление, углубление и расширение знаний студентов при исследовании преобразований структурных схем.
–Приобретение умений и навыков работы с программой математического моделирования MATLAB.
–Овладение несколькими методами преобразования структурных схем.
3. Теоретическая часть
Для наглядного представления сложной системы как совокупности элементов и связей между ними используются структурные схемы.
Структурной схемой называется схема САУ, изображенная в виде соединения ПФ составляющих ее звеньев.
Структурная схема показывает строение автоматической системы, наличие внешних воздействий и точки их приложения, пути распространения воздействий и выходную величину. Динамическое или статическое звено изображается прямоугольником, в котором указывается ПФ звена. Воздействия на систему и влияние звеньев друг на друга (сигналы) изображаются стрелками. В каждом звене воздействие передается только от входа звена к его выходу.
На динамическое звено может воздействовать лишь одна входная величина, поэтому используются блоки суммирования и сравнения сигналов. Суммироваться и сравниваться могут лишь сигналы одной и той же физической природы.
Структурная схема может быть составлена по уравнению системы в пространстве состояний или по системе дифференциальных уравнений. При составлении структурной схемы удобно начинать с изображения задающего воздействия и располагать динамические
15

звенья, составляющие прямую цепь системы, слева направо до регулируемой величины. Тогда основная обратная связь и местные обратные связи будут направлены справа налево.
Различные способы преобразования структурных схем облегчают определение ПФ сложных САУ и дают возможность привести многоконтурную систему к эквивалентной ей одноконтурной схеме.
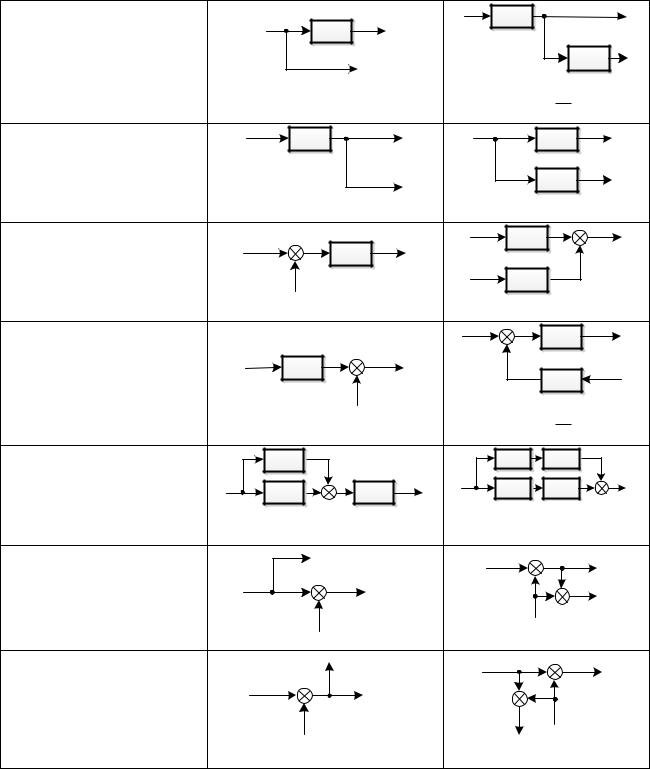
Преобразование структурной схемы должно осуществляться на основании правил, основные из них приведены в табл. 1.
При выполнении преобразований следует каждое имеющееся в схеме типовое соединение заменить эквивалентным звеном. Затем можно выполнить перенос точек разветвления и сумматоров, чтобы в преобразованной схеме образовались новые типовые соединения звеньев. Эти соединения опять заменяются эквивалентными звеньями, затем вновь может потребоваться перенос точек разветвления и сумматоров и т. д.
Различают основные соединения блоков в структурных схемам: последовательное соединение, параллельное соединение, антипараллельное соединение (обратная связь), в свою очередь обратная связь может быть отрицательной и положительной.
Таблица 1
Основные правила преобразования структурных схем
|
|
Структурная схема |
Преобразование |
|
|
Исходная |
Эквивалентная |
Свертывание |
|
|
|
|
|
|
|
|
|
последовательного |
u |
W1 |
W2 |
Wn |
y |
W |
|
|
|
соединения |
|
|
|
u |
y |
W |
W1W2...Wn |
||
|
|
|
|
|
|
|
|||
|
|
|
W1 |
|
|
|
W |
|
|
Свертывание |
|
|
W2 |
|
|
u |
|
y |
|
параллельного |
u |
|
|
y |
|
|
|||
|
|
|
W W1 |
W2 ... Wn |
|||||
соединения |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Wn |
|
|
|
|
|
|
Свертывание |
u |
± |
W1 |
|
y |
u |
W |
|
y |
обратной связи |
|
|
|
|
|||||
|
|
|
|
|
|
W1 |
|
||
|
|
|
W2 |
|
|
W |
|
||
|
|
|
|
|
|
1 W W |
|||
|
|
|
|
|
|
|
|
1 |
2 |
16
|
|
|
|
|
|
|
|
|
|
Окончание табл. 1 |
|||
|
|
|
|
W |
|
|
|
|
u |
W |
|
|
y |
Перенос узла через |
|
u |
|
|
|
|
|
|
|
|
|||
|
|
|
y |
|
|
|
|
|
|
|
|||
звено вперед |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
W1 |
x |
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
W |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Перенос узла через |
|
u |
W |
|
|
|
y |
|
u |
W |
|
y |
|
звено назад |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
|
y |
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
|
|
|
u1 |
W |
|
|
y |
Перенос сумматора |
|
u1 |
|
|
|
|
|
|
|
± |
|||
|
|
|
|
y |
|
|
|
|
|
||||
через звено вперед |
|
± |
|
|
|
|
|
|
|
|
|
||
|
u2 |
|
|
|
|
|
|
W |
|
|
|
||
|
|
|
|
|
|
|
u2 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
u1 |
|
W |
|
y |
Перенос сумматора |
|
|
|
|
|
|
|
|
± |
|
|
||
|
|
W |
|
|
|
|
|
|
|
|
|
||
через звено назад |
|
u1 |
|
|
|
y |
|
|
|
W1 |
|
|
|
|
|
|
|
± |
|
|
|
|
u2 |
||||
|
|
|
|
|
u2 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
W |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W3 |
|
|
|
|
|
|
|
W3 |
W2 |
± |
|
Перенос прямой |
|
|
± |
|
|
|
|
|
|
|
|
|
|
|
W1 |
|
|
W2 |
|
|
|
W1 |
W2 |
|
|
||
связи через звено |
u |
|
|
|
|
|
u |
|
y |
||||
|
|
|
|
y |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 |
|
|
+ |
|
|
Перенос узла через |
|
|
x1 |
|
|
y |
|
|
+ |
|
- |
+ |
|||
сумматор вперед |
x1 |
|
- y |
|
+ |
|
x1 |
|
|
|
|
|
x2 |
|
|
|
|
x2 |
|
|
|
|
|
|
|
|
y |
|
+ |
|
|
|
|
|
x1 |
|
|
|
|
Перенос узла через |
|
+ |
|
+ |
- |
y |
|
|
|
|
|||||
сумматор назад |
x1 |
- |
y |
|
- |
x2 |
|
|
|
|
|
y |
|
||
|
|
x2 |
|
|
|
||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
Пример. Пусть необходимо получить эквивалентное представление для структуры, приведенной на рис. 1.
17

W1 |
|
|
|
|
|
|
+ |
+ |
|
|
|
W2 |
W3 |
W5 |
W6 |
||
|
|||||
|
+ |
|
- |
|
W7 |
W4 |
Рис. 1. Исходная схема САУ
Преобразование включает несколько этапов, показанных на рис. 2–5.
W1 |
|
|
|
|
|
|
+ |
+ |
|
|
|
W2 |
W3 |
W5 |
W6 |
||
|
|||||
|
+ |
|
- |
|
W4 |
1/W6 |
W7 |
Рис. 2. Перенос узла через сумматор
W1 |
|
|
+ |
W2 |
W3 |
|
+ |
W8 |
W9 |
W9 |
|
W5W6 |
|
W7W6W5 |
||||
|
|
1 |
W8 W4
W6
Рис. 3. Свертывание обратной связи и последовательного соединения
W10 |
W11 |
W10 W1 W2
W11 |
|
|
W3W9 |
WЭкв |
|
W3W8W9 |
|
||
|
1 |
|
||
Рис. 4. Свертывание обратной связи и параллельного соединения
WЭкв |
W10W11 W1W3W5W6 W2W3W5W6
1 W5W6W7 W3W4W5
Рис. 5. Свертывание последовательного соединения
18
Таким образом, первый способ преобразования структурных схем заключается в непосредственном использовании правил, приведенных в табл.1. Неудобство использования этого подхода заключается в том, что порядок применения формул здесь достаточно произволен, возможны ошибочные шаги, усложняющие поиск решения.
Второй способ для получения ПФ многоконтурной системы заключается в использовании модели системы в виде сигнального графа.
Сигнальный граф позволяет графически описать линейные связи между переменными, он состоит из узлов (вершин) и соединяющих их направленных ветвей.
Ветвь соответствует блоку структурной схемы, она отражает зависимость между входной и выходной переменными. Сумма всех сигналов, входящих в узел, образует соответствующую этому узлу переменную.
Последовательность ветвей между двумя узлами называется путем. Контуром называется замкнутый путь, который начинается и заканчивается в одном и том же узле, причем ни один узел не встречается на этом пути дважды.
Контуры называются некасающимися, если они не имеют общих узлов.
Сигнальный граф – это просто наглядный метод записи системы алгебраических уравнений, показывающий взаимосвязь между переменными.
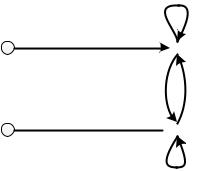
a11
r1
 x1
x1
a21 a12
r2
 x2
x2
a22
Рис. 6 Сигнальный граф для двух алгебраических выражений
В качестве примера рассмотрим следующую систему алгебраических уравнений:
19

a11x1 a12 x2 r1 x1 , |
(1) |
a21x1 a22 x2 r2 x2 . |
(2) |
здесь r1 и r2 – входные переменные, а x1 и x2 – выходные переменные. Сигнальный граф, соответствующий уравнениям (1) и (2), изображен на рис. 6. Уравнения (1) и (2) можно записать в ином виде:
x1(1 a11) x2 ( a12 ) r1, x1( a21) x2 (1 a22 ) r2 .
Решая последнюю систему по правилу Крамера, получим:
x1 |
|
|
|
(1 a22 )r1 a12r2 |
|
|
|
a11)(1 a22 ) a12a21 |
|||
|
(1 |
||||
x2 |
|
|
(1 a11 )r2 a21r1 |
||
(1 a11 )(1 a22 ) a12a21 |
|||||
|
|
|
|||
(1 a22 )r1 a12 r2 ,
(1 a11 )r2 a21 r1 .
Вэтих решениях знаменатель равен определителю, составленному из коэффициентов при неизвестных, и его можно записать так:
(1 a11)(1 a22 ) a12a21 1 a11 a22 a11a22 a12a21.
Вданном случае знаменатель равен единице минус коэффици-
енты передачи отдельных контуров a11, a22 и a12a21 плюс произведение коэффициентов передачи двух некасающихся контуров a11 и a22. Контуры a22 и a12a21 являются касающимися, так же, как и контуры a11
иa21a12.
Врешении для x1 по отношению ко входу r1 числитель равен
единице, умноженной на (1-a22), т.е. значение определителя некасающегося пути от r1 к x1. В решении для x1 по отношению ко входу r2числитель просто равен a12, т.к. этот путь касается всех контуров. Числитель выражения x2 симметричен соответствующему числителю
для x1.
В общем случае линейная зависимость Tij между независимой переменной xi (часто называемой входной переменной) и зависимой переменной xj определяется по формуле Мейсона:
20