

МУ расчет контактора
.pdf6.3 Кинематический расчет привода Механической характеристикой электрического аппарата
называется зависимость всех механических сил или моментов,
приведенных обычно к оси действия привода аппарата, от величины хода или от угла поворота привода.
В электрических аппаратах с электромагнитным приводом за величину хода обычно принимается величина рабочего воздушного зазора магнитной системы.
Механическая характеристика, представляющая собой изменение механических противодействующих сил, развиваемых пружинами при передвижении якоря, имеет вид ломанной линии
(рис. 4), так как на якорь действуют две пружины: возвратная и контактная с различными коэффициентами упругости (рис.5)
Рис.4. Механическая характеристика
34
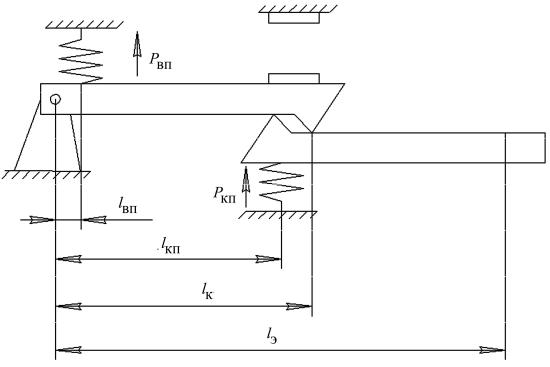
Рис.5. Геометрия возвратной и контактной пружины
6.3.1 Характеристика противодействующих сил
6.3.1.1 Расчет силы предварительного сжатия контактных пружин всех полюсов
|
P |
Pкlэ p |
Н, |
|
|
|
кс |
l |
|
|
|
|
|
к |
|
|
|
где |
llэ - отношение плеч (для постоянного тока |
llэ |
= 1,5-2,5, для |
||
|
к |
|
|
к |
|
переменного тока lэ =0,8-1,5); р − число полюсов контактора. lк
6.3.1.2 Расчет силы конечного сжатия контактных пружин
Pкк (1,3 1,5)Pкс Н.
6.3.1.3 Расчет конечного сжатия возвратной пружины
PА 0,3 0,5 Pкс Н.
35

6.3.1.4Расчет силы начального сжатия возвратной пружины
Pвпн 0,3 0,5 PА Н.
6.3.1.5Расчет полного хода контактов
β=σп+βкм,
где βк − раствор контакта;
βк 0,42 10 6Uн1,1
 Iотк м.
Iотк м.
По найденным величинам строят ориентировочную характеристику противодействующих сил (механическая характеристика), приведенных к общей оси вращения (рис.5).
По оси абсцисс откладывается ход якоря электромагнита, по оси ординат − приведенные значения сил, где δК − критический зазор
(момент касания контактов), δmin – минимальный зазор 0,5 мм.
6.3.2 Расчет возвратной пружины
6.3.2.1 Расчет силы начального натяжения возвратной пружины
lэ 2 4;
lвп
Pвп llэ PА Pвпн Н.
вп
6.3.2.2 Определение расчетного напряжения на скручивания
σкр σдкрп Н/мм2,
где σдкр =800 Н/мм2 − допустимое значение напряжения кручения для стальной пружины; n − коэффициент для пружины растяжения
(табл. 8).
36

|
|
|
Таблица 8 |
|
Коэффициенты пружин |
|
|
|
|
|
|
Вид пружины |
n |
|
C |
|
|
|
|
пружины сжатия |
1,5 |
|
5-10 |
|
|
|
|
пружины растяжения |
2 |
|
7-10 |
|
|
|
|
6.3.2.3 Расчет диаметра проволоки пружины
d 8PвпС мм.
 πσкр
πσкр
6.3.2.4 Расчет сжатия пружины
fβ2мм.
6.3.2.5Предварительный расчет числа витков и длины пружины
всвободном состоянии
Wп Ed4 f 1,5
8Dср3 Pвп
где E=196∙103 Н/мм2 − модуль сдвига; Dср − средний диаметр пружины Dср Сd,мм.
Округляем число витков в большую сторону.
6.3.3 Расчет контактной пружины
6.3.3.1 Расчет силы контактной пружины
lэ 2 4;
lкп
Pкп llкпэ Pкк PА Н.
37

6.3.3.2 Определение расчетного напряжения на скручивание
σкр σдкрп Н/мм2,
где n − коэффициент для пружины сжатия. 6.3.3.3 Диаметр проволоки пружины
d 8PкпС мм.
 πσкр
πσкр
6.3.3.4 Расчет сжатия пружины
f σ2п мм.
6.3.3.5 Предварительный расчет числа витков
Ed4 f
Wп 8Dср3 Pкп 2,
где E − модуль сдвига для стальной проволоки по табл. 9; Dср −
средний диаметр пружины Dср Сd,мм.
Округляем число витков контактной пружины до ближайшего целого.
Наиболее распространенным материалом пружин является пружинная углеродистая сталь; значительно реже применяется фосфористая бронза. Основные физические свойства материалов пружин (средние значения) приведены в табл. 9:
|
|
|
|
Таблица 9 |
|
|
|
|
|
|
|
Материал |
Е,Н/мм2 |
G,Н/мм2 |
,Н/мм2 |
,Н/мм2 |
|
|
|
|
|
|
|
Стальная лента |
196000 |
78500 |
1200-1600 |
800-1200 |
|
Стальная проволока |
196000 |
78500 |
900-1300 |
700-900 |
|
Бронзовая проволок и лента |
108000 |
39000 |
400-600 |
300 |
|
|
|
|
|
|
|
38
6.4 Расчет электромагнита
Основные параметры и характеристики электромагнитов
следующие:
1)конструктивная форма;
2)род тока, номинальное напряжение и частота источника питания, режим питания (постоянство напряжения, тока, мощности);
3)режим работы (продолжительный, кратковременный,
повторно-кратковременный и др.);
4)потребляемая мощность;
5)развиваемая сила и величина начального хода или зависимость электромагнитной силы от хода − тяговая характеристика;
6)предельная температура нагрева (класс нагревостойкости изоляции);
7)параметры притягивания (втягивания) и отпускания якоря
(сердечника); время, напряжение, ток;
8)износостойкость - число гарантируемых операций;
9)масса;
10)габаритные размеры;
11)стоимость.
Оценка оптимальности выбора конструкции электромагнита
может быть произведена с помощью конструктивного фактора Г
(табл. 10).
39
В ряде случаев приходится отступать в процессе конструирования от формы, соответствующей минимуму расхода материала и габарита, исходя из других требований.
Для изготовления магнитопроводов электромагнитов постоянного и переменного тока применяются магнитомягкие низкоуглеродистые стали, свойства которых характеризуются кривыми намагничивания.
Таблица 10 |
|
Конструктивная форма электромагнита |
|
Конструктивная форма электромагнита |
Г Н0,5/м |
|
|
Цилиндрический с разомкнутой магнитной системой |
менее 0,2 |
Цилиндрический с плоским стопом |
16-93 |
Шихтованный с прямоходовым якорем, Т, Ш - образным |
|
и броневой(переменного тока) |
1-80 |
Двухкатушечный с двумя сердечниками и внешним плоским якорем |
2,7-270 |
Однокатушечный с одним сердечником и внешним |
1,9-180 |
якорем(клапанного типа) |
|
|
|
Конструктивные схемы электромагнитов постоянного и переменного тока приведены на рис. 6 и 7.
40
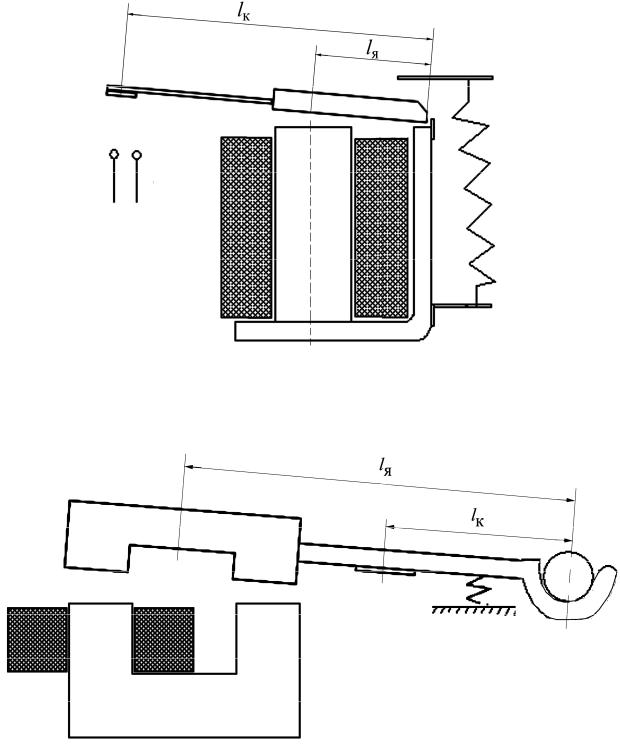
Рис. 6. Электромагнит постоянного тока с внешним притягивающимся якорем и параллельной катушкой
Рис. 7. Электромагнит переменного тока с внешним притягивающимся якорем и параллельной катушкой
41

6.4.1 Расчет оптимальной конструктивной формы электромагнита
6.4.1.1 Расчет электромагнитной силы
P(1,2 1,5)Pвпн, Н
6.4.1.2Расчет геометрического показателя Для электромагнитов переменного тока
Г |
2P |
Н0,5 /м, |
|
||
|
δmax |
|
где δmax=δmin β − максимальный рабочий зазор, м.
Для электромагнитов постоянного тока
Г 
 P Н0,5 /м,
P Н0,5 /м,
δкр
где δкр - критический зазор;
δкр 0.5 10 3 σп(1,5 2,5) м.
По значению геометрического показателя выбираем конструктивную форму электромагнита (табл. 10).
6.4.2 Расчет основных размеров электромагнита
6.4.2.1 Расчет электромагнитной силы
P1 (1,2 1,5)Pвпн Н.
6.4.2.2 Расчет сечения полюса Для электромагнитов переменного тока
Sc 4μB02P1 м2,
δ
42

где Bδ − магнитная индукция в рабочем зазоре, по рекомендациям выбираем в приделах 0,6-1,2 Тл.
Для электромагнитов постоянного тока
S |
|
2μ0P1 |
м2, |
|
B2 |
||||
c |
|
|
||
|
|
δ |
|
где μ0 – магнитная постоянная, μ0=4π∙10-7 Гн/м.
6.4.2.3 Определение размеров сторон сечения прямоугольного
сердечника электромагнита переменного тока
а |
|
Sс |
|
м, |
|
k |
|
|
|||
с |
зст |
b |
|
||
|
|
|
с |
|
|
где kзст − коэффициент заполнения сечения пакета сталью (для листов стали толщиной 0,35 мм и 0,5 мм равен соответственно 0,9 и 0,95)
ас 1 2 bс м.
Диаметр круглого сердечника электромагнита постоянного тока определяется по формуле
dс 
 4πSс м.
4πSс м.
6.4.2.4 Расчет высоты сердечника Для электромагнитов постоянного тока размеры обмоточного
пространства выбираются из соотношения
hс dс(4 10) м.
Для электромагнитов переменного тока
hс ас(1 3) м.
43