bushuev_v_v_i_dr_metallorezhushie_stanki_tom_2
.pdf

20.2. Типовые структуры |
463 |
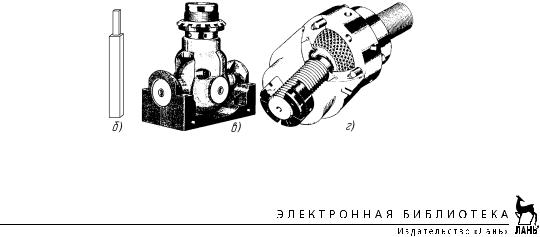
Рис. 20.8. Структурная схема модуля Sprint-Z3
переменной длины на основе шариковой винтовой пары, и содержат привод. Дру-
гая кинематическая цепь — пассивная, Рис. 20.7. Схема станка SKM 400 т.е. это кинематическая цепь без привода.
Выходное звено имеет три степени свободы (в данном случае перемещение по трем взаимно-перпендикулярным осям). Характеристики: максимальная скорость движения выходного звена 120 м/мин; ускорение 11,5 м/с2; объем рабочего пространства 600×500×600 мм. Частота вращения шпинделя 30 000 мин–1; мощность привода шпинделя 15 кВт.
Встанке SKM 400 фирмы Heckert (Германия) (рис. 20.7) используется МПК
стремя степенями свободы. Выходное звено 3 связано с основанием 1, 6 тремя кинематическими цепями, реализованными в виде штанг переменной длины 2, и одной пассивной кинематической цепью 4. В данном случае пассивная ветвь позволяет не только увеличить угловые жесткости выходного звена, но также оказывает влияние на его ориентацию (в рассматриваемом механизме это вращение вокруг оси шпинделя). Такое воздействие не изменяет технологические возможности станка, для расширения которых используется привод угловой ориентации стола 5. Максимальная скорость движения выходного звена 100 м/мин, ускорение 1g.
Достаточно широко триподы используют в качестве основных модулей, которые реализуют три степени свободы шпинделя. Примером такого решения является модуль Sprint-Z3 (рис. 20.8). Выходное звено 1 модуля связано с основанием 2 тремя кинематическими цепями. Каждая кинематическая цепь состоит из штанги 3, которая связана с выходным звеном 1 сферическим шарниром, а с ползуном 4 — вращательной парой с одной степенью подвижности. Ползун 4 перемещается по направляющей 5 от своего привода. Привод установлен для перемещения ползуна по направляющей. Структура данного МПК обеспечивает выходному звену одно перемещение (параллельное направляющим и два вращения вокруг двух перпендикулярных осей).

464 |
ГЛАВА 20. СТАНОЧНОЕ ОБОРУДОВАНИЕ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ |
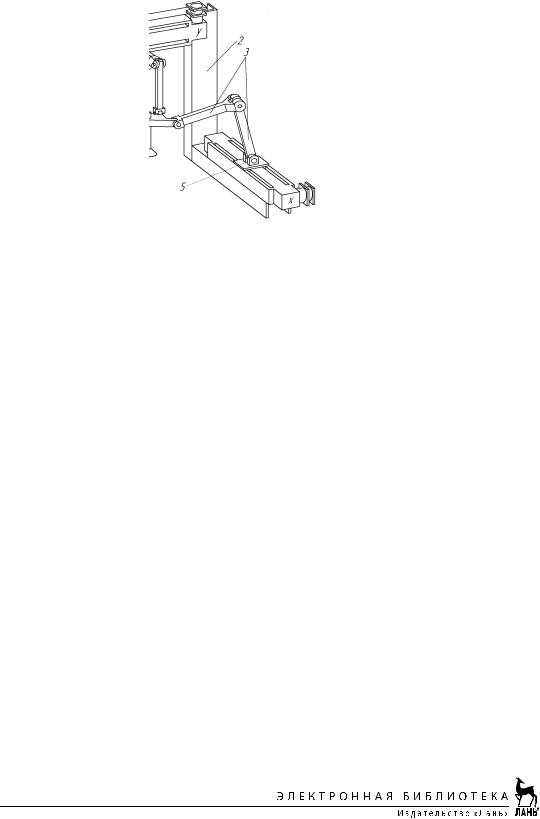
Рис. 20.9. Структура трипода с расширенными технологическими возможностями
Технологические возможности оборудования на основе триподов можно повысить, используя дополнительные перемещения элементов его структуры (рис. 20.9). Выходное звено трипода 1 связано с основанием 5 тремя кинематическими цепями в виде штанг постоянной длины 3, взаимодействующими с ползунами, перемещающимися по направляющим 5. В свою очередь основание трипода 5 установлено на платформе, которая перемещается вдоль станины 2. Рабочий стол 6, на котором закрепляется заготовка, также может перемещаться относительно станины 2 в направлении, перпендикулярном направлению перемещения основания 5. Такое решение позволяет значительно расширить объем рабочего пространства станка.
В «Дельта»-структурах используются параллельные конструктивные элементы (рис. 20.10). Как правило, такими элементами являются штанги. На базе «Дельта»-структуры создан станок Quickstep HS 500 фирмы Krauseco & Mauser
|
(Австрия). Выходное звено механиз- |
|
ма 1, несущее шпиндель, соединено |
|
со станиной станка через три кине- |
|
матические цепи, причем в каждой |
|
кинематической цепи установлены |
|
парные штанги 2, связанные с пол- |
|
зунами 3. Характеристики: макси- |
|
мальная скорость движения выход- |
|
ного звена 80 м/мин; ускорение 2g; |
|
объем рабочего пространства 630× |
|
×630×500 мм. |
|
В схеме на рис. 20.11 применя- |
|
ется структура типа «Дельта» на |
|
основе вращательных приводных |
Рис. 20.10. Структурная схема станка типа |
механизмов. Выходное звено 1 свя- |
Quickstep HS 500 |
зано с основанием 5 с помощью трех |

466 |
ГЛАВА 20. СТАНОЧНОЕ ОБОРУДОВАНИЕ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ |
Рис. 20.13. Структура параллельной кинематики триптерона
Рис. 20.14. Примеры структур триптеронов
менты цепи соединены между собой только вращательными кинематическими парами 5. Отличительная особенность триптерона — это то, что оси всех кинематических пар 5 в каждой цепи параллельны друг другу и ось перемещения соответствующего ползуна также параллельна осям пар 5. В результате этого при перемещении одного из ползунов выходное звено перемещается только вдоль одной из осей, параллельной оси перемещения ползуна. Таким образом получается линейная зависимость между координатами положения выходного звена и перемещениями ползунов по направляющим, что нехарактерно для структур параллельной кинематики. Данная структура эффективна при трех взаимноперпендикулярных перемещениях рабочего органа.
На схемах (рис. 20.14) приведены варианты структур триптерон с разной геометрией. Здесь выходное звено 1 связано с основанием 2 также тремя кинематическими цепями со штангами 3 и ползуном 4. Оси кинематических пар цепей параллельны между собой, но, в отличие от предыдущей структуры, они скрещиваются с соответствующими осями перемещения ползунов.
Трицепты. Кроме триподов существует еще и вторая группа оборудования параллельной кинематики, которая получила название трицепты. Они содержат центральную кинематическую цепь, не имеющую привода. Такая цепь вы-

20.2. Типовые структуры |
467 |
|
полнена на основе массивной трубы, |
|
|
как правило, с бо´льшим диаметром, |
|
|
чем другие кинематические ветви. Она |
|
|
предназначена для восприятия изгиб- |
|
|
ных деформаций. Конструкция отлича- |
|
|
ется от триподов характером нагрузок, |
|
|
которые воспринимают кинематиче- |
|
|
ские цепи. Так, например, приводные |
|
|
цепи трицепта работают в основном на |
|
|
растяжение и сжатие (изгибные нагруз- |
|
|
ки воспринимает центральная кинема- |
|
|
тическая цепь без привода), в то время |
|
|
как у трипода они работают еще и на |
Рис. 20.15. Структурная схема станка |
|
кручение. В качестве примера приве- |
||
ден трицепт Tricept TR805 фирмы NEOS |
типа трицепт Tricept TR805 фирмы NEOS |
|
|
Robotics |
|
Robotics (рис. 20.15), который выполнен |
|
|
|
|
|
в виде отдельного технологического модуля. |
|
|
Выходное звено 1 связано с основанием 2 четырьмя кинематическими цепями. Три цепи выполнены в виде штанг переменной длины с приводами 3, причем эти штанги 3 связаны с основанием 2 карданными шарнирами 4, а с выходным звеном — сферическими шарнирами 5. Одна из кинематических цепей выполнена в виде массивной трубы 6 без привода, которая жестко связана с выходным звеном 1. Труба 6 может свободно перемещаться вдоль оси втулки 7, но не может совершать поворот вокруг ее оси. Втулка 7 связана с основанием 2 карданным шарниром 8. Благодаря такой структуре центральная кинематическая цепь воспринимает все изгибные нагрузки, что позволяет повысить жесткость станка. Все трицепты оснащены дополнительной насадкой на выходном звене, которая предназначена для изменения угловой ориентации шпинделя.
Четырехподы. В качестве примера можно привести обрабатывающий центр (Китай) (рис. 20.16). Выходное звено 1 связано с основанием четырьмя кинематическими цепями. Каждая кинематическая цепь содержит штангу постоянной длины 2 и ползун 3, перемещающийся по направляющим 4. Соединение штанг с выходным звеном осуществляется сферическими шарнирами с тремя степенями
свободы, шарнирные соединения |
штанг |
|
с ползунами в двух цепях имеют одну сте- |
|
|
пень свободы, а в оставшихся — две степе- |
|
|
ни свободы. Центры закрепления двух ки- |
|
|
нематических цепей с выходным звеном |
|
|
совпадают. Такой механизм имеет четыре |
|
|
степени свободы, а именно: перемещения |
|
|
по осям Y и Z и вращение вокруг осей X и |
|
|
Y. Перемещение по оси X достигается под- |
|
|
вижным столом. Максимальная скорость |
|
|
движения выходного звена 30 м/мин, |
|
|
ускорение 5 м/с2, объем рабочего про- |
Рис. 20.16. Станок на основе |
|
странства 800×500×600 мм. |
|
|
|
четырехпода |
|

468 |
ГЛАВА 20. СТАНОЧНОЕ ОБОРУДОВАНИЕ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ |
Рис. 20.17. Экспериментальная структура четырехпода
Примером экспериментальной структуры четырехпода является механизм с четырьмя кинематическими цепями в виде штанг постоянной длины (рис. 20.17). Выходное звено 1 связано с основанием 2 четырьмя кинематическими цепями. Две из них содержат штанги постоянной длины 5, которые соединены с выходным звеном сферическими шарнирами, а с ползунами — посредством карданных шарниров. Другие две кинематические цепи содержат штанги постоянной длины 3, которые связаны с выходным звеном сферическими шарнирами, а с ползунами 4 — вращательными парами. Выходное звено данной структуры имеет два поступательных перемещения и два вращения.
Пентаподы. Примером станка на основе пентапода является модель Triomaxx. Выходное звено этого станка связано с основанием тремя кинематическими цепями в виде штанг переменной длины через карданные шарниры. Цепи имеют два привода, один из которых изменяет длину штанги, а другой — угловую ориентацию шарнира вокруг оси штанги. В результате штанги работают не только на растяжение и сжатие, но и на кручение.
Примером пентапода служит разработанный в Германии обрабатывающий центр METROM (рис. 20.18). Структура имеет пять степеней свободы (в данном случае невозможно вращение вокруг оси шпинделя). Выходное звено 1 выполнено в форме цилиндра, в котором установлен шпиндель. На разных уровнях цилиндра установлены кольца 2 так, что они могут вращаться вокруг своих осей. Оси колец совпадают с осью цилиндра. Штанги 4 соединены с кольцами с помощью шарниров 3 с одной степенью свободы. Каждое кольцо имеет один шарнир 3. Оси вращения шарниров 3 лежат в плоскостях соответствующих колец, т.е. в плоскостях, перпендикулярных оси шпинделя. Штанги 4 представляют собой шариковую винтовую передачу, в которой гайка выполнена за одно целое с ротором двигателя 6. Конструкция шарниров 5 выполнена так, что двигатель 6 расположен в конструкции самого шарнира. В случае, если все кольца 2 смогут вращаться вокруг оси шпинделя, то появляется неопределенность угловой координаты вращения вокруг оси шпинделя. При любом положении выходного звена

20.2. Типовые структуры |
469 |
Рис. 20.18. Структурная схема станка типа METROM
цилиндр шпинделя может вращаться вокруг своей оси; в этом случае проводить обработку невозможно. Для устранения этого недостатка одно из колец жестко фиксируется с цилиндром; таким образом, получается механизм параллельной кинематики с пятью степенями свободы. Основным преимуществом такой структуры являются большие углы наклона шпинделя, которые могут достигать значений 90о и более. Для расширения технологических возможностей станка стол 7 вращается вокруг свой оси.
Гексаподы. Из всех ранее рассмотренных механизмов биподов, триподов и др., гексаподы наиболее полно реализуют в себе все преимущества механизмов параллельной кинематики. Так, например, при достаточно высокой жесткости конструкции и относительной простоте получаем механизм, с помощью которого можно ориентировать выходное звено по шести степеням свободы. Наибольшее распространение получили станки на основе структур МПК с переменными длинами штанг на основе шариковых винтовых передач (с телескопическими штангами) (см. рис. 20.2). С использованием такой структуры выполнено оборудование Mikromat 6X Hexa. Размеры рабочей зоны 630×630×630 мм, предельные углы поворотов шпинделя 30о; скорость подачи 30 м/мин; ускорение 1 g; максимальная частота вращения шпинделя 30 000 мин–1. Станок оснащен системой обработки данных, что позволяет компенсировать изменения ряда его характеристик, которые возникают в процессе эксплуатации. Для этого в каждой штанге установлен лазерный интерферометр. Так, например, в процессе работы станка возникают тепловые деформации, приводящие к удлинению штанг. Система обработки данных позволяет проводить корректировку длин штанг. Учитываются тепловые изменения размеров других деталей, износ, погрешности шариковых винтовых передач и т.п.
Станки, сочетающие в себе координатную измерительную машину и технологический модуль, разработаны АО «ЛАПИК» (Саратов, Россия). Выпущен ряд модификаций оборудования. На станках можно выполнять операции фрезеро-