

2.2. Определение величины, характеризующей количество степеней свободы произвольной системы.
Классификация систем по этому признаку
W=3×3 – 3×1 – 2×1 – 4 =0

Формула П.Л.Чебышева:
W=3D – 2Ш – 3П – С, где
W − количество степеней свободы,
D − количество простейших дисков,
Ш − количество простых шарниров,
П − количество простых припаек,
С − количество опорных стержней.
Рис.2.10
Перейдем к классификации систем по величинам их степеней свободы.

1. W > 0 − система изменяема (механизм). Непосредственно ее использование возможно лишь после добавления W связей.
Рис.2.11
2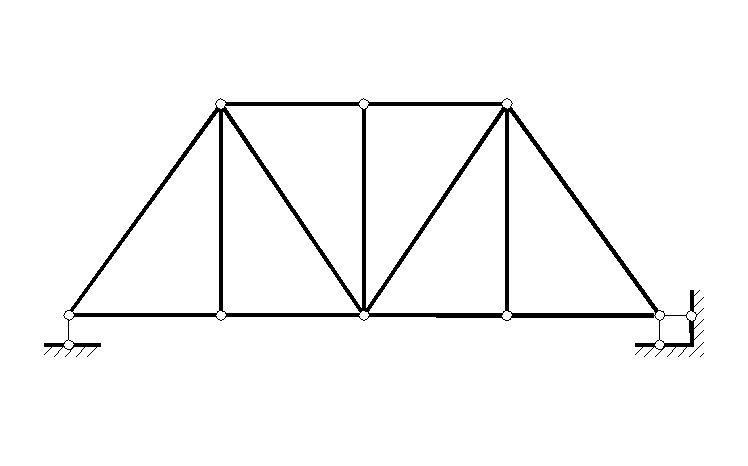 .W
= 0 − система при разумной расстановке
связей может быть неизменяемой.
.W
= 0 − система при разумной расстановке
связей может быть неизменяемой.
Необходим дополнительно структурный анализ.
Рис.2.12

3. W< 0 − система имеет лишние связи (говорят, что она статически неопределима) и при разумной расстановке этих связей может быть неизменяемой. Также необходим структурный анализ.
Рис.2.13
Для проведения структурного анализа необходимо ознакомить с основными принципами образования неизменяемых и мгновенно изменяемых систем.
2.3. Основные принципы образования
неизменяемых и мгновенно изменяемых систем
Таблица 2.1
|
Неизменяемые системы |
Мгновенно изменяемые системы |
|
1. Узел, присоединенный к диску при помощи двух стержней, не лежащих на одной прямой
|
Стержни лежат на одной прямой
|
|
2. Один диск присоединен к другому при помощи трех стержней, оси которых не пересекаются в одной точке и все три одновременно не параллельны
|
Оси трех стержней параллельны или пересекаются в одной точке
|
|
3. Диск, присоединенный к другому одним шарниром и стержнем, ось которого не проходит через шарнир
|
Ось стержня проходит через шарнир
|
|
4. Три диска, соединенных между собой при помощи трех шарниров, не расположенных на одной прямой
|
Все три шарнира лежат на одной прямой
|
|
5. Три диска соединены при помощи шести стержней. Два пересекающихся стержня можно заменить фиктивными шарнирами Ф(1)
|
Фиктивные шарниры Ф(1) лежат на одной прямой.
|










2.4 Примеры проведения кинематического анализа
ЗАДАЧА 1.
Р ешение:
ешение:
1.Определяем количество степеней свободы заданной системы:
W = 3×16 – 3×0 – 2×22 − 4 = 0
Связей достаточно для того, чтобы система была геометрически неизменяемой.
Рис. 2.14
2. Проведем структурный анализ. Диски 1−2,2−3,3−1 согласно принципа 4 (см.табл.2.1) образуют единую неизменяемую систему. К ней
присоединен узел 4 (принцип 1). Диски 1−2−3−4 согласно принципа 2 образуют единую неизменяемую систему с основанием ("землей"). Аналогично образуется неизменяемая система 6−10−9−5, которая согласно принципа 2 образует единую неизменяемую систему с вышеописанным диском. Окончательно имеем дело с неизменяемой системой.
ЗАДАЧА 2.
|
Рис.
2.15 |
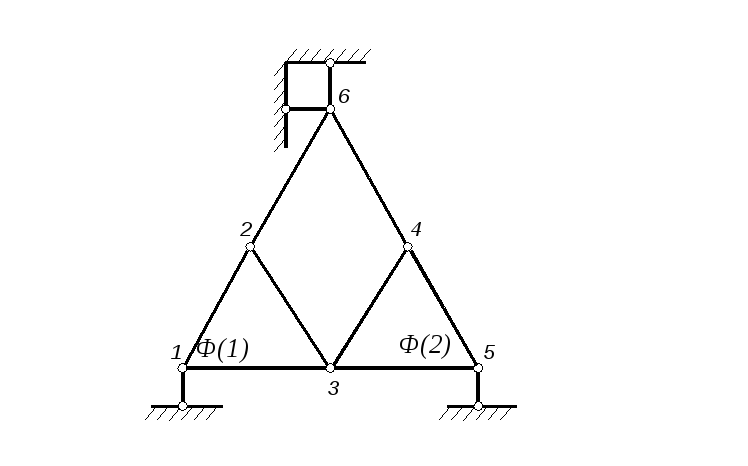
1. W = 3×8 – 3×0 − 2×10 − 4
Система М.Б.Н.
2. Проведем структурный анализ.
Налицо три диска: 1-2-3, 3-4-5 и так называемый диск "земля". Диск 1-2-3 соединен с "землей" с помощью двух стержней, пересекающихся в точке 1 (фиктивный шарнир Ф(1)), а 3-4-5 с "землей" посредством двух стержней, пересекающихся в точке 5 (второй фиктивный шарнир Ф(2)). Три диска (1-2-3, 3-4-5 и "земля") соединены с помощью трех шарниров (Ф(1), Ф(2) и 3), лежащих на одной прямой. Система мгновенно изменяема (согласно принципа 4).
ЗАДАЧА 3.
Р ешение:
ешение:
1. W = 3×6 – 3×0 – 2×5 − 7 = 1 Система изменяемая, в структурном анализе нет необходимости.
Рис 2.16
ЗАДАЧА 4.
|
Р |
 ис
2.16
ис
2.16Решение:
1. W = 3×6 – 3×1 – 2×5 − 5 = 0
Система может быть неизменяемой.
2. Проведем структурный анализ.
Диск 5-6 вместе с "землей" образует единую неизменяемую систему, к которой с помощью двух стержней 5-2 и 1-2 присоединен узел 2 (система неизменяема согласно принципа 1). Аналогично присоединен узел 3. Система неизменяемая, а значит дальнейший ее расчет возможен.