

Типы внутренних соединений
1. Жесткое (иногда называют ПРИПАЙКОЙ) соединение. В этом соединении невозможны ни поступательные движения, ни повороты.

До и после загружения считается, что направление А'А || В', А'В' || АВ
 const
const
const

Рис.1.15
(многие узлы железобетонных конструкций являются жесткими).
2. ШАРНИРНЫЕ соединения - препятствуют взаимным поступательным движениям, но не сопротивляются повороту.

Рис.1.16
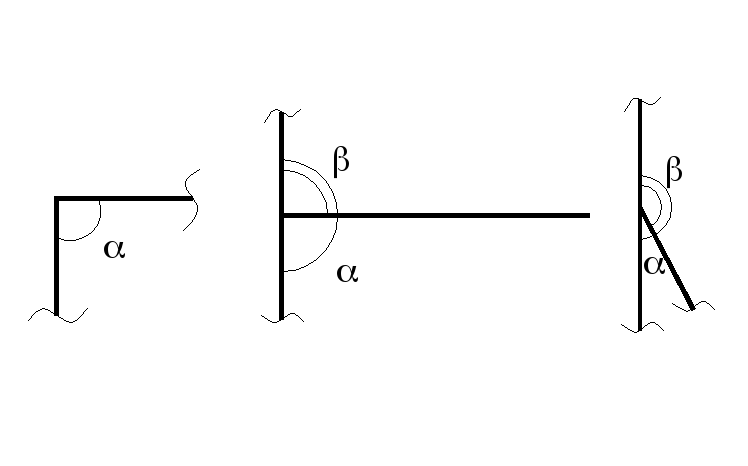
3. Упругое соединение. В этом соединении поворот и поступательное движение пропорциональны жесткости соединения.

Рис.1.17
1.6. Классификация нагрузок
Различают следующие виды нагрузок:
1. По происхождению:
А. ПОЛЕЗНЫЕ нагрузки, для восприятия которых возводится сооружение (оборудование, краны, транспорт, гидростатическое давление в плотинах);
Б. СОБСТВЕННЫЙ ВЕС конструкций;
В. ПРИРОДНЫЕ нагрузки (ветер, снег, землетрясения и др.)
2. По продолжительности действия:
А. ПОСТОЯННАЯ - это собственный вес и некоторые виды полезных нагрузок.
Б. ВРЕМЕННАЯ, подразделяется на:
1) длительную
2) кратковременную (вес людей, атмосферная нагрузка)
3) особую (сейсмическая, температура, осадки опор)
3. По характеру действия:
А. СТАТИЧЕСКИЕ - величина, направление и положение нагрузки неизменны во времени (нет инерции);
Б. ДИНАМИЧЕСКИЕ - нагрузки вызывающие инерционные силы.
При расчете конструкций должны учитываться нагрузки и воздействия в наиболее невыгодных комбинациях. Различают основные, дополнительные и особые сочетания нагрузок:
А. Основные - это постоянная плюс длительная временная и одна из наиболее существенных кратковременных временных нагрузок;
Б. Дополнительные - это постоянная плюс временная длительная и все кратковременные временные нагрузки. В. Особые сочетания - это постоянная плюс временная длительная плюс все кратковременные временные плюс особые нагрузки.
Нормативные величины и характер нагрузок, а также коэффициент перегрузки берутся из СНИП 2.01.07-85* "Нагрузки и воздействия".
2. Кинематический анализ расчетных схем сооружений
Очевидно, что сооружения должны быть геометрически неизменяемыми, то есть постоянно сохранять геометрическую форму, заданную при возведении. Ответ на вопрос "Движется ли?" может быть сформулирован лишь на соответствующем кинематическом языке ("кинема" - греч. слово движение).
2.1. Основные понятия
ГЕОМЕТРИЧЕСКИ НЕИЗМЕНЯЕМОЙ принято называть систему соединенных между собой элементов сооружения, изменение взаимного расположения отдельных частей которого возможно лишь за счет их деформации (рис.2.1). Именно такие системы применяются в практике строительства.
Г ЕОМЕТРИЧЕСКИ
ИЗМЕНЯЕМЫМИ будем называть системы,
в которых возможны взаимные перемещения
отдельных элементов без их деформации
(рис.2.2). Они представляют собой механизмы
и некоторые из них применяются в
различных машинах.
ЕОМЕТРИЧЕСКИ
ИЗМЕНЯЕМЫМИ будем называть системы,
в которых возможны взаимные перемещения
отдельных элементов без их деформации
(рис.2.2). Они представляют собой механизмы
и некоторые из них применяются в
различных машинах.
Рис.2.1

Геометрическая неизменяемость зависит не только от количества связей в системе, но и от их взаимного расположения .
Рис.2.2
С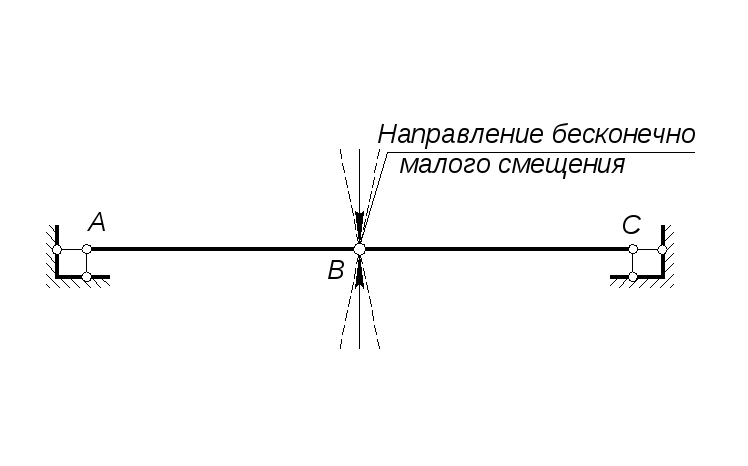 истемы,
в которых возможны малые взаимные
перемещения без деформации элементов,
называются МГНОВЕННО ИЗМЕНЯЕМЫМИ.
После осуществления этих малых
перемещении система может стать
неизменяемой (рис.2.3). Подобные системы
названы так И.М.Рабиновичем.
истемы,
в которых возможны малые взаимные
перемещения без деформации элементов,
называются МГНОВЕННО ИЗМЕНЯЕМЫМИ.
После осуществления этих малых
перемещении система может стать
неизменяемой (рис.2.3). Подобные системы
названы так И.М.Рабиновичем.


N1=N2;
![]()

-



На самом деле



Рис.2.3 Примеры мгновенно изменяемых систем
с пояснениями причин невозможности из эксплуатации.
Определимся с некоторыми категориями кинематического анализа:
- ДИСКИ - простейшие геометрически неизменяемые элементы систем;



Стержни Плоские фигуры Треугольник
Рис.2.4
- КОЛИЧЕСТВО СТЕПЕНЕЙ СВОБОДЫ СИСТЕМЫ определяется числом независимых геометрических параметров однозначно определяющих ее положение в плоскости (пространстве);

Рис 2.5
Для того, чтобы превратить системы в неизменяемые (а именно они нас и интересуют) необходимо наложить связи (по количеству степеней свободы).
Поговорим о СВЯЗЯХ - устройствах, предотвращающих взаимные поступательные движения и повороты:
А. Связь 1 рода - СТЕРЖЕНЬ.
Она не позволяет смещаться в направлении связи и таким образом снимает одну степень свободы.
Рис 2.6
Б .
ШАРНИР - препятствует любым взаимным
линейным смещениям - снимает в
плоскости две степени свободы
(соответствует двум непараллельным
стержням).
.
ШАРНИР - препятствует любым взаимным
линейным смещениям - снимает в
плоскости две степени свободы
(соответствует двум непараллельным
стержням).
Рис.2.7
Шарнир, соединяющий два диска, называется ПРОСТЫМ. А если в соединении дисков более двух - КРАТНЫМ.
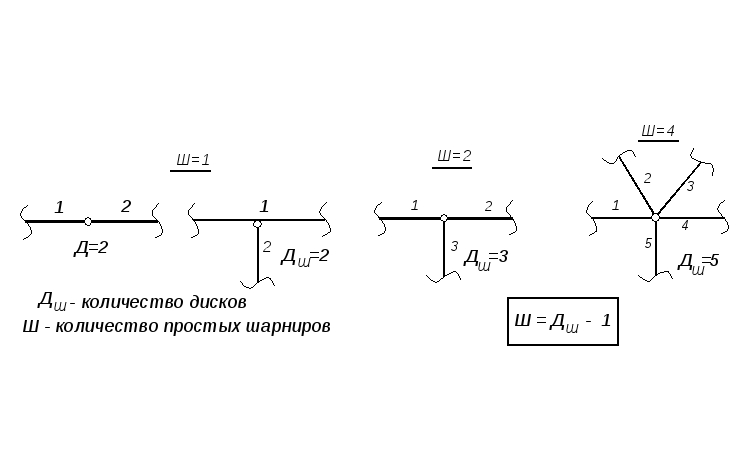
Рис.2.8
В .
ПРИПАЙКА - препятствует любым
взаимным перемещениям (линейным и
повороту). Соответствует шарниру и
стержню, линия действия которого не
проходит через шарнир или трем
непараллельным или непересекающимся
в одной точке стержням.
.
ПРИПАЙКА - препятствует любым
взаимным перемещениям (линейным и
повороту). Соответствует шарниру и
стержню, линия действия которого не
проходит через шарнир или трем
непараллельным или непересекающимся
в одной точке стержням.

Рис.2.9