

лаб_Датчики_мех_величин
.pdfРис. П4.5. Габаритные и установочные размеры 2,5 ВТ
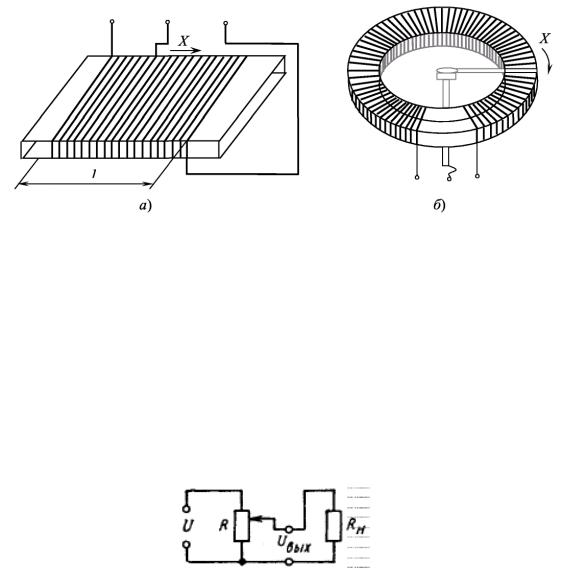
Потенциометрические датчики предназначены для преобразования механического перемещения в электрический сигнал. Основной частью датчика является реостат, сопротивление которого изменяется при перемещении движка, скользящего по проволоке (схема включения потенциометрического датчика показана на рис. П4.6). Напряжение питания подается на всю обмотку реостата через неподвижные выводы этой обмотки. Выходное напряжение, пропорциональное перемещению движка, снимается с одного из неподвижных выводов и с подвижного движка. Такая схема включения в электротехнике называется потенциометрической или схемой делителя напряжения.
Если сопротивление всей обмотки датчика обозначить через R, а сопротивление части этой обмотки, с которой снимается выходное напряжение, через RВЫХ, то потенциометрическая схема включения датчика может быть представлена как последовательное соединение резисторов с сопротивлением RВЫХ и (R-
RВЫХ) (рис. П4.6).
Ток через обмотку датчика I = U/R, а приложенное напряжение распределяется (делится) между последовательно соединенными резисторами: U=IRВЫХ + I(R-RВЫХ). Если сопротивление обмотки равномерно распределить по длине l, а перемещение движка обозначить через х, то выходное напряжение датчика
(П4.17)
Таким образом, выходной сигнал датчика пропорционален перемещению движка.
Рис. П4.6. Схема включения потенциометрического датчика
В автоматических системах движок может быть механически связан с ка- ким-либо устройством (клапаном, рулем, антенной, режущим инструментом и т. п.), положение которого надо измерить и передать в виде электрического сигнала. Усилие, под действием которого перемещается движок, в этом случае весьма велико. Поэтому для обеспечения надежного контакта между движком и обмоткой следует иметь достаточно большую силу прижатия движка. В автоматических приборах для измерения различных неэлектрических величин движок датчика соединяется с чувствительным элементом, преобразующим кон-
71
тролируемую величину в перемещение. Усилие, развиваемое чувствительными элементами (мембранами, биметаллическими пластинами, поплавками и т. п.), невелико. Поэтому нельзя сильно прижимать движок к обмотке.
Наличие скользящего контакта снижает надежность потенциометрического датчика и является его основным недостатком. Для питания датчика может быть использовано как напряжение постоянного тока, так и напряжение переменного тока невысокой частоты. Входным сигналом датчика может быть не только линейное, но и угловое перемещение. В зависимости от закона изменения сопротивления обмотки различают линейные и функциональные потенциометрические датчики.
Основной характеристикой потенциометрического датчика является зависимость выходного напряжения UВЫХ от перемещения х (рис. П4.7).
Рис. П4.7.
При равномерной намотке эта зависимость линейная только на холостом ходу, т. е. при отсутствии сопротивления нагрузки, подключенной к выходным зажимам датчика. В реальных условиях к этим зажимам подключаются электрические приборы, входное сопротивление которых является сопротивлением нагрузки для датчика (рис. П4.8).
Под нагрузкой обычно понимается ток нагрузки. Когда говорят, что нагрузка отсутствует, то подразумевают, что именно ток нагрузки равен нулю. Сопротивление же нагрузки при этом, естественно, равно бесконечности. Следовательно, в режиме холостого хода (т. е. при отсутствии нагрузки) сопротивление нагрузки бесконечно велико.
Рис. П4.8. Подключение нагрузки к потенциометрическому датчику
Для анализа влияния сопротивления нагрузки RH на основную характеристику датчика, полное сопротивление обмотки которого R, введем понятие коэффициента нагрузки β = RH/R и α = х/l. Выходное напряжение датчика:
72
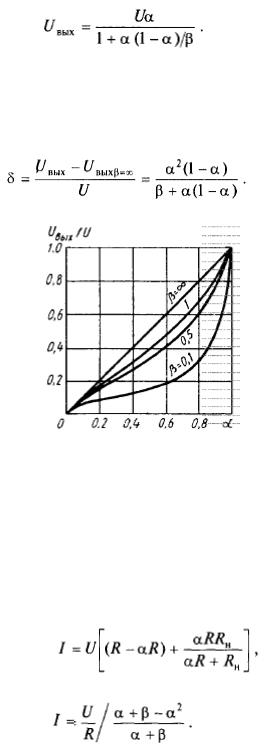
(П4.18)
По этому уравнению построим зависимость UВЫХ/U =f( α), где U – напряжение питания датчика, для различных значений β (рис. П4.9). С уменьшением сопротивления нагрузки характеристика датчика становится нелинейной и возрастает ошибка преобразования. Относительная погрешность для нагруженного датчика может быть найдена сопоставлением выражений (П4.17) и (П4.18):
(П4.19)
Рис. П4.9. Статические характеристики потенциометрического датчика
Отношение перемещения движка х к длине намотки l обозначаем через α = х/l. Если датчик не нагружен, т. е. сопротивление нагрузки RH = ∞ и β = ∞, то выходное напряжение линейно возрастает при изменении α от 0 до 1; UВЫХ = αU. Графически эта зависимость изображается прямой линией. При наличии сопротивления нагрузки RH, соизмеримого с сопротивлением обмотки R, эта зависимость отличается от линейной, поскольку часть тока, проходящего через датчик, ответвляется в нагрузку. Ток, поступающий от источника питания,
или, подставляя RH = βR
На рис. 10 построены кривые 1 и 2, характеризующие относительную погрешность датчика при β =1; 0,5 соответственно. При больших β абсолютная величина максимальной погрешности δМАХ = (4/27)β при α = 2/3.
Важной характеристикой качества потенциометрического датчика является плавность изменения выходного напряжения. При перемещении движка по обмотке потенциометра происходит скачкообразное изменение сопротивления, поскольку движок как бы перескакивает с одного витка на другой. Это приводит к тому, что зависимость выходного напряжения от перемещения имеет ступенчатый вид (рис. П4.11). Число ступеней пропорционально, а их высота обратно пропорциональна числу витков обмотки.
73
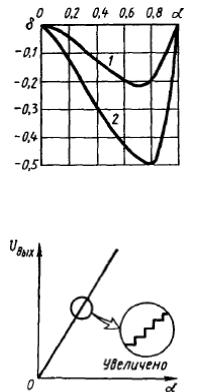
Рис. П4.10. Графики относительной погрешности потенциометрического датчика
Рис. П4.11. Ступенчатость статической характеристики потенциометрического датчика
Реальная выходная характеристика имеет отклонения от идеальной (плавной, бесступенчатой) как вверх, так и вниз. Следовательно, погрешность, вызванная ступенчатостью, может быть как положительной, так и отрицательной
исоставляет половину напряжения UB, приходящегося на один виток намотки. Если обозначить через w общее число витков потенциометра, то UВ= U/w и погрешность ступенчатости ≤ U/(2w). Для количественной оценки погрешности, обусловленной ступенчатостью, вводят понятие электрической разрешающей
способности потенциометра δР. Разрешающая способность определяет максимально возможную точность работы потенциометрического датчика. Улучшить ее можно, увеличивая число витков w. Для этого можно либо удлинить намотанную часть потенциометра l (при заданном диаметре провода), либо уменьшить сечение провода. Уменьшение диаметра провода приводит к технологическим трудностям изготовления обмотки, но, самое главное, снижает надежность потенциометра, поскольку ухудшается механическая прочность обмотки
иона быстрее истирается. Увеличение длины обмотки, естественно, приводит к увеличению размеров всего потенциометра. Для устранения этого недостатка были разработаны многооборотные потенциометры. Для улучшения разрешающей способности можно также применять движки с несколькими токосъемными контактами.
74
Перечень литературы
1.Агеев О.А., и др. Микроэлектронные преобразователи неэлектрических величин: Учебное пособие. – Таганрог: Изд-во ТРТУ, 2000. – 153 с.
2.Агейкин Д.И., Костина Е.Н., Кузнецова Н.Н. Датчики контроля и регулирования. – М.: Машиностроение, 1965. – 928 с.
3.Алтухов А.М. и др. Элементы автоматических систем контроля. – М.:
Энергия, 1967. – 340 с.
4.Арменский Е.В., Фалк Р.Б. Электрические микромашины. – М.: Высш.
шк., 1979. – 240с.
5.Афанасьев В.В. и др. Трансформаторы тока. – 2-е изд. – Л.: Энерго-
атомиздат, 1989. – 416 с.
6.Бараночников М.Л. Микромагнитоэлектроника. Т. 1 и 2 – М: ДМК Пресс, 2001.
7.Бриндли К. Измерительные преобразователи: Справочное пособие: Пер.
сангл. – М.: Энергоатомиздат, 1991. – 144 с.
8.Виглеб Г. Датчики: Пер. с нем. – М.: Мир, 1989. – 196 с.
9.Викулин И.М., Викулина Л.Ф., Стафеев В.И. Гальваномагнитные приборы. – М.: Радио и связь, 1983. – 104 с.
10.Геращенко О.А., Федоров В.Г. Тепловые и температурные измерения. Справочное руководство. – Киев: Наукова Думка, 1965. – 304 с.
11.ГОСТ 19223–90. Светодальномеры. Типы. Основные параметры и технические требования;
12.Джексон Р.Г. Новейшие датчики. – М.: Техносфера, 2007. – 384 с.
13.Домрачёв В.Г. Схемотехника цифровых преобразователей перемещений. Справочное пособие M.: Энерrоатомиздат, 1987. – 392 с.
14.Жданкин В.К. Ультразвуковые датчики для систем управления. Журнал: Современные технологии автоматизации №10, 2003г. – 10с.
15.Измерение электрических и неэлектрических величин: Учеб. пособие для вузов / Н.Н.Евтихиев, Я.А.Купершмидт, В.Ф.Папуловский, В.Н.Скугоров; Под общ. ред. Н.Н.Евтихиева. – М.: Энергоатомиздат, 1990. – 352 с.
16.Келим Ю. М. Типовые элементы систем автоматического управления. Учебное пособие для студентов учреждений среднего профессионального образования. – М.: ФОРУМ: ИНФРА-М, 2002. – 384 с.
17.Кобус А., Тушинский Я. Датчики Холла и магниторезисторы: Пер. с польск. В.И.Тихонова и К.Б. Макидонской, под ред. О.К. Хомерики. – М.:
Энергия, 1971. – 120 с.
18.Кондрашков А. В., Электрооптические и радиогеодезические измере-
ния, М., 1972.
19.Левшина Е.С., Новицкий П.В. Электрические измерения физических величин (Измерительные преобразователи). Учеб. пособие для вузов. – Л.: Энергоатомиздат. Ленингр. отд-ние, 1983. – 320 с.
20.Литвинов Б. А., Лобачев В. М., Воронков Н. Н., Геодезическое инструментоведение, [2 изд.], М., 1971;
75
21.Мухин В.С., Саков И.А. Приборы контроля и средства автоматики тепловых процессов: учеб. Пособие для СПТУ. – М.: Высш. Школа, 1988. – 256 с.
22.Осадчий Е.П. Проектирование датчиков для измерения механических величин М.: Машиностроение, 1979.–480c.
23.Панев Б.И. Электрические измерения: Справочник (в вопросах и ответах). – М.: Агропромиздат, 1987. – 224 с.
24.Сапожников В.В., Кравцов Ю.А., Сапожников Вл.В. Теоретические основы железнодорожной автоматики и телемеханики: Учеб. для вузов / Под ред. В.В.Сапожникова – М.: Транспорт, 1995. – 320 с.
25.Справочник по электрическим машинам: В 2 т./ Под общ. ред. И. П. Копылова и Б. К. Клокова. Т. 2. M.: Энергоатомиздат, 1988. – 456 с.
26.Фрайден Дж. Современные датчики. Справочник М.: Техносфера, 2005. – 592с.
27.Шишмарёв В.Ю. Автоматизация технологических процессов: Учеб. Пособие М.:Академия 2005.–352с.
28.Юферов Ф.М. Электрические машины автоматических устройств: Учеб. для студентов вузов, обучающих по специальности «Электромеханика».
–2-е изд., перераб. и доп. – М.: Высш. шк., 1988. – 479с.
29.Siemens. Basics of Sensors. Industrial Automation Sensors. Siemens AG 2006. – 112c.
30.Shell R.L., Hall E.L. Handbook of Industrial Automation. NY.: Marcell Decker 2000. – 857c.
76