

Pr_6
.docxМинистерство науки и высшего образования Российской Федерации
Федеральное государственное автономное образовательное учреждение высшего образования
«Национальный исследовательский Томский политехнический Университет»

Инженерная школа энергетики
Отделение электроэнергетики и электротехники
Направление: 13.03.02 Электроэнергетика и электротехника
Практическая работа №6
Проектирование системы управления конвейером в среде Easy-Soft
По дисциплине «Микропроцессорные средства систем автоматики, управления и диагностики»
Выполнили: :
|
|
||||
студент гр. 5А06 |
|
|
Сергеев А.С. |
|
|
|
|
|
|
|
|
Проверил:
|
|
||||
К.т.н, доцент |
|
|
Гирник А.С. |
|
|
|
|
|
|
|
|
Томск – 2023
Цель: Освоить принципы построения объединённой интеллектуальной системы для управления физической моделью конвейера (ленточного транспортёра).
Описание лабораторной установки
Физическая модель ленточного транспортёра представляет собой установку с транспортной лентой, приводимой в движение ведущим барабаном, который в свою очередь вращается от приводного двигателя. Над лентой расположена оптическая система для контроля габаритов транспортируемых грузов и их высоты. В конце транспортного пути расположены две приёмные корзины, которые предназначены для приёма условно как высоких, так и низких грузов, которые сбрасываются поворотной площадкой. Выбор направления для сброса в ту или иную корзину определяется системой управления. Также под каждой корзиной имеются датчики веса грузов. Физическая модель ленточного транспортёра представлена на рисунке 1.
В системе управления физической моделью присутствует контролирование следующих сигналов: позиционирование грузов по ширине ленты с помощью лазерных лучей по бокам вдоль ленты, высота транспортируемых грузов за счёт использования двух световых лучей на двух разных высотах поперёк направления движения ленты, скорость ленты с помощью оптодатчика скорости на ведомом барабане.
Также в данной схеме присутствует задание частоты вращения с помощью двоичного кода.
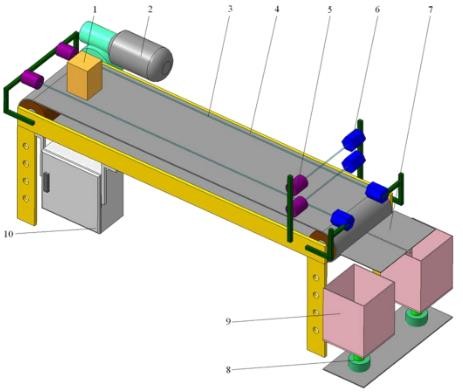
Рисунок 1 - Физическая модель конвейера
На рисунке 1 приведены следующие обозначения:
1 – Транспортируемый груз;
2 – Электродвигатель асинхронный;
3 – Световой луч;
4 – Лента;
5 – Источник света;
6 – Оптический датчик;
7 – Направляющая поворотная площадка для спуска грузов в корзины 9;
8 – Датчики перемещения для измерения веса грузов;
9 – Приёмные корзины для сбора грузов;
10 – Силовой шкаф с электрооборудованием.

Рисунок 2 - Транспортёр ленточный. Схема электрическая управления
Создание системы управления в среде Easy Soft
В схеме на рисунке 3 пуск и остановка двигателя конвейера производится с помощью подачи сигналов на входы реле «I01» и «I02», либо с помощью Р- кнопок «P03» и «P01».
При перекрытии сигналов датчиков левого или правого габаритов, данные сигналы, а именно их отсутствие, размыкают цепь питания контактора
«Q01» с помощью контактов «I05» или «I06».
В схеме на рисунке 4 сигналы перекрытия уровней высокого и низкого грузов поступают на входы «I07» и «I08». В то же время данные сигналы запускают таймеры задержки отключения «T02E» и «T03E», чтобы удержать питание контакторов «Q02» и «Q03», которые в свою очередь подают питание на соленоиды привода поворотной площадки для сброса грузов по корзинам. Это нужно для того, чтобы пока зафиксированный груз проходит датчики уровней и начинает падать на площадку, последняя ещё должна какое-то время быть повёрнута в нужную корзину, чтобы груз успел упасть. Ведь здесь будет присутствовать такой момент времени, когда падающий груз уже не перекрывает датчики уровня и их сигналы на входы «I07» и «I08» снова поступают.
Кроме того, вместе с таймерами, срабатывают счётчики «C02C» и «C03C» для отдельного подсчёта количества высоких и низких грузов.
-

Рисунок 3 - Схема запуска и сортировки
Рисунок 4 - Схема сортировки
В схеме рис. 5, увеличение и уменьшение скорости двигателя конвейера производится с помощью подачи сигналов на входы реле «I03» и «I04», либо с помощью Р-кнопок «P02» и «P04». Затем эти сигналы идут на счетчик «C01C».
При достижении текущего значения счётчика «C01C» равного пределу 7, контакт «OF» размыкает цепь питания самого счётчика прямого счёта «C01C».
При снижении текущего значения счётчика «C01C» до минимального значения 0, контакт «FB» блокирует питание основного счётчика «C01C» и его инвертора направления счёта «C01D».
Рисунок 5 - Схема управления скоростью двигателя конвейера
Текущее значение счётчика «C01C» необходимо преобразовать в двоичный вид из 3-х разрядов. Для этого используются компараторы «CP», которые в зависимости от значения счётчика будут включать нужные контакторы «Q4», «Q5» и «Q6». Каждый контактор соответствует своему разряду для формирования двоичного кода, который в виде трёх отдельных сигналов подаётся на входы преобразователя частоты (ПЧ), управления скоростью вращения дви гателя (рис. 2).
На рисунке 6 показана схема преобразования уровня скорости в электрические сигналы в виде 3-х разрядного двоичного кода.
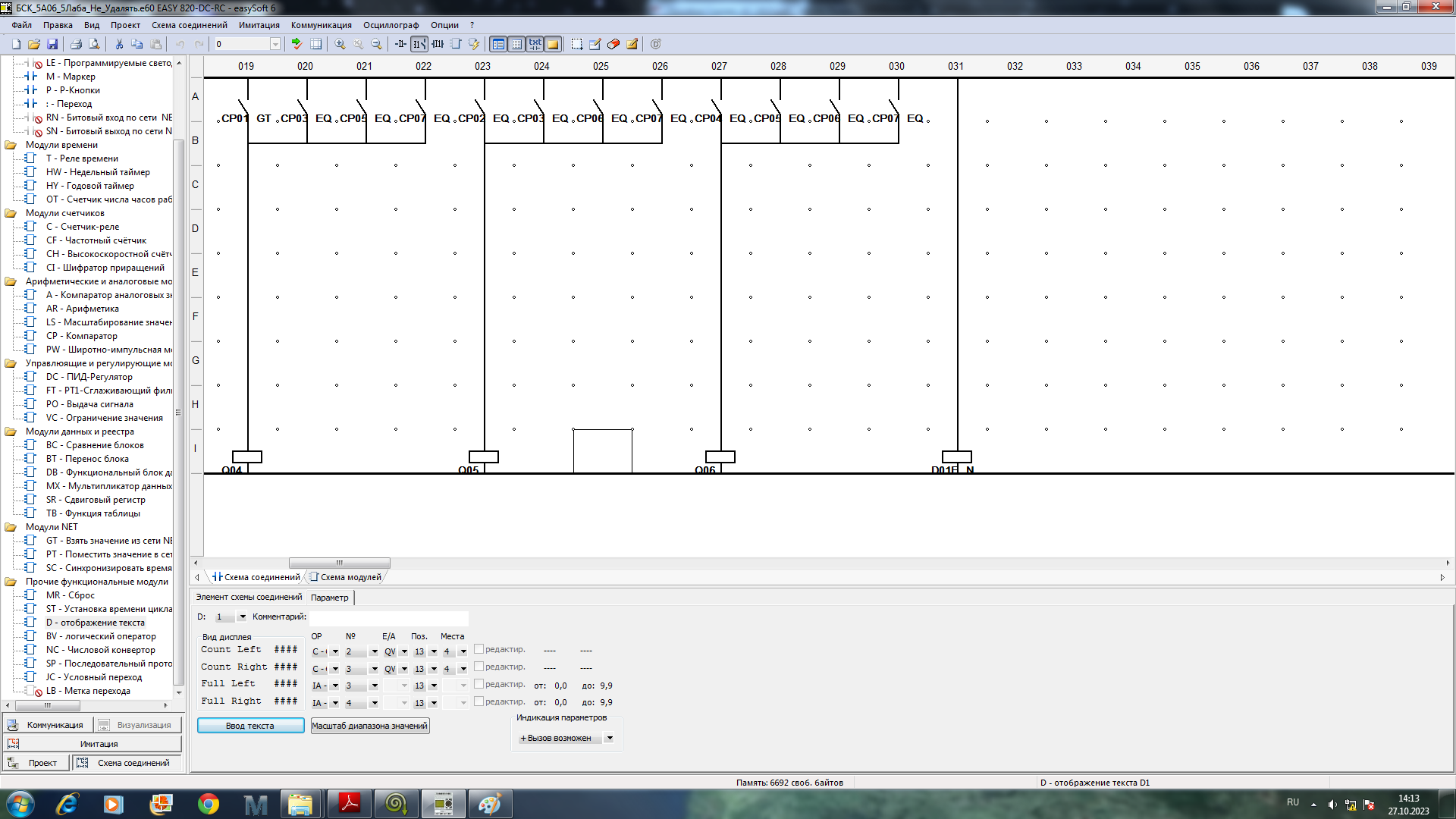
Рисунок 6 - Схема получения 1-го, 2-го и 3-го разрядов двоичного кода скорости на базе счётчика номера скорости
Компаратор «CP01» замыкает свои контакты при условии, если уровень скорости равен 1. Это достигается с помощью задания параметров:
«I1» – сравниваемый сигнал, который получает выходное значение
«QV» от счётчика «С01»;
«I2» – эталон, с которым сравнивается «I1», при равенстве с которым компаратор замыкает контакты. В данном случае равен 1 – номеру первой скорости.
Компараторы «CP02-CP07» настраиваются аналогично, но условие срабатывания у них задаётся для «I2» со значением их номера скорости.
Для отображения некоторых параметров и их величин сразу на живом дисплее реле, существует специальный модуль «D». На рис. 7 это модуль
«D01». Данный модуль настроен для отображения количества высоких и низких грузов, а также их веса.
|
|
Рисунок 7 - Схема модуля «D01» |
Рисунок 8 - Ввод текста модуля «D01» |

Вывод: В ходе данной лабораторной работы спроектирована программа управления конвейером в среде EasySoft. Сделана практическая проверка работы программы на лабораторном стенде. Практически убедились в работоспособности конвейера по программному алгоритму, что свидетельствует о правильности выполнения задания.