

Лабораторна робота №4
ДОСЛІДЖЕННЯ ІНДИКАТОРНОГО РЕЖИМУ РОБОТИ
БЕЗКОНТАКТНИХ СЕЛЬСИНІВ
Мета роботи: Вивчення будови і принципу роботи безконтактних
сельсинів; визначення похибок, питомого синхронізувального моменту сельсина-приймача, залежностей синхронізувального моменту, струму, потужності сельсина-сенсора, струмів у лінії зв’язку від кута розбіжності.
Рисунок 4.1 – Схема ввімкнення сельсинів при їх роботі
в індикаторному режимі
Рисунок 4.2 – Векторна діаграма для ротора сельсина-приймача
Миттєве значення синхронізувального моменту:
Рисунок 4.3 – Залежність величини синхронізувального моменту від кута неузгодженості в сельсинах з неявно вираженими (а) і явно вираженими (б) полюсами
4.2 Програма лабораторної роботи
Ознайомитися з будовою лабораторної установки, конструкцією сельсинів.
Дослідити роботу сельсинів в індикаторному режимі.
Визначити похибки і побудувати криві похибок = f(С).
Визначити питомий синхронізувальний момент сельсина-приймача і побудувати в одних координатних осях графіки (П, Із, Мсн, Мс.пит) = f(G), де G – вага вантажу.
Визначити залежності синхронізувального моменту, струму, потужності сельсина-сенсора, струмів у лінії зв’язку від кута неузгодженості. За даними досліду побудувати залежності (Мсн, Із, Рз, Іл1 Іл2, Іл3) = f() в одних координатних осях.
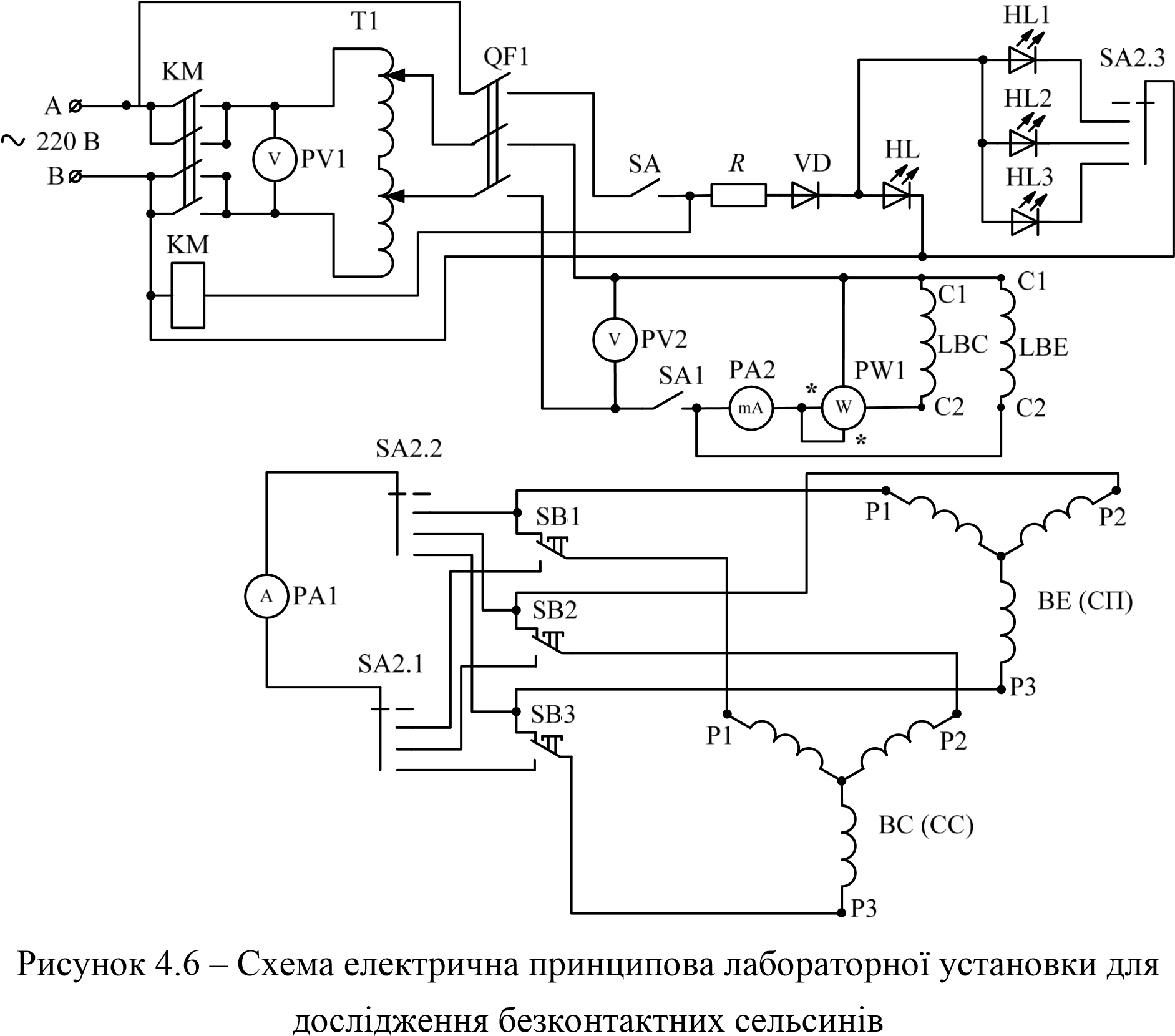
Рисунок 4.6 – Схема електрична принципова лабораторної установки для дослідження безконтактних сельсинів
№ точ. |
Напрямок руху ротора сельсина-сенсора |
Точність сельсинів, клас точності |
|||||||
за годинниковою стрілкою |
проти годинникової стрілки |
||||||||
С, град |
П, град |
|
С, град |
П, град |
|
||||
1 |
90 |
88,5 |
1,5 |
360 |
358,2 |
1,8 |
0,15 (1 клас) |
||
2 |
180 |
177,5 |
2,5 |
270 |
269,3 |
0,7 |
0,9 (2 клас) |
||
3 |
270 |
268,4 |
1,6 |
180 |
177,7 |
2,3 |
0,35 (1 клас) |
||
4 |
360 |
359 |
1 |
90 |
88,4 |
1,6 |
0,6 (1 клас) |
||
Таблиця 4.1 – Експериментальні та розрахункові дані для визначення похибки сельсинів
Вимі-рювання |
Параметри |
||||||
G, г |
, град |
Із.С, мА |
Mсн, г∙см |
Мсн.пит, г∙см/град |
Мсн.пит.ср, г∙см/град |
Примітки |
|
за годинниковою стрілкою |
0 |
0 |
0,1 |
0 |
0 |
0.27 |
|
4 |
51 |
0,13 |
7,6 |
0,15 |
|
||
6 |
102 |
0,21 |
11,4 |
0,11 |
|
||
14 |
153 |
0,31 |
26,6 |
0,17 |
|
||
25 |
204 |
0,34 |
47,5 |
0,23 |
|
||
83 |
255 |
0,39 |
157,7 |
0,62 |
|
||
95 |
306 |
0,42 |
180,5 |
0,59 |
|
||
проти годинникової стрілки |
0 |
304 |
0,43 |
0 |
0 |
1,85 |
|
4 |
253 |
0,39 |
7,6 |
0,03 |
|
||
6 |
200 |
0,36 |
11,4 |
0,057 |
|
||
14 |
152 |
0,29 |
26,6 |
0,175 |
|
||
25 |
101 |
0,23 |
47,5 |
0,47 |
|
||
83 |
49 |
0,12 |
157,7 |
3,22 |
|
||
95 |
20 |
0,11 |
180,5 |
9,025 |
|
||
Таблиця 4.2 – Дані для визначення питомого синхронізувального моменту
Таблиця 4.3 – Експериментальні та розрахункові дані для побудови залежностей (Мсн, Із., Рз, Іл1 Іл2, Іл3) = f()
№ точ. |
Дослідні дані |
Розрахункові дані |
Примітка |
|||||||||
С, град |
П, град |
Iз, А |
Рз, Вт |
Іл1, мА |
Іл2, мА |
Іл3, мА |
sin |
Мсн, гсм |
, град |
Uз = 110 В Мmax = 425 гсм Мсн M max sin = С – П |
||
1. |
30 |
28,5 |
0,12 |
1,2 |
24 |
24 |
24 |
0,99 |
420,75 |
1,5 |
||
2. |
90 |
89,3 |
0,169 |
2,9 |
72 |
72 |
72 |
0,64 |
272 |
0,7 |
||
3. |
120 |
121 |
0,214 |
4,4 |
91 |
91 |
91 |
0,84 |
357 |
1 |
||
4. |
180 |
179,6 |
0,225 |
6,25 |
126 |
126 |
126 |
0,38 |
161,5 |
0,4 |
||