

Лаб 6
.docxЛабораторна робота №6
ДОСЛІДЖЕННЯ ТРИФАЗНОГО ІНДУКЦІЙНОГО РЕГУЛЯТОРА
Мета: Вивчити будову і принцип роботи індукційного регулятора, методику зняття вихідних характеристик регулятора.
Програма роботи
Ознайомитися з будовою лабораторної установки, записати паспортні дані досліджуваного індукційного регулятора, підібрати відповідні їм вимірювальні прилади.
Зняти вихідні характеристики U = f(α) індукційного регулятора при:
а) правильному чергуванні фаз;
б) неправильному увімкненні фаз (А-В);
в) неправильному увімкненні фаз (А-С);
г) неправильному увімкненні фаз (В-С);
Визначити коефіцієнт трансформації індукційного регулятора.
Для кожного із дослідів підпункту 2 побудувати залежності U = f(α) та векторні діаграми.
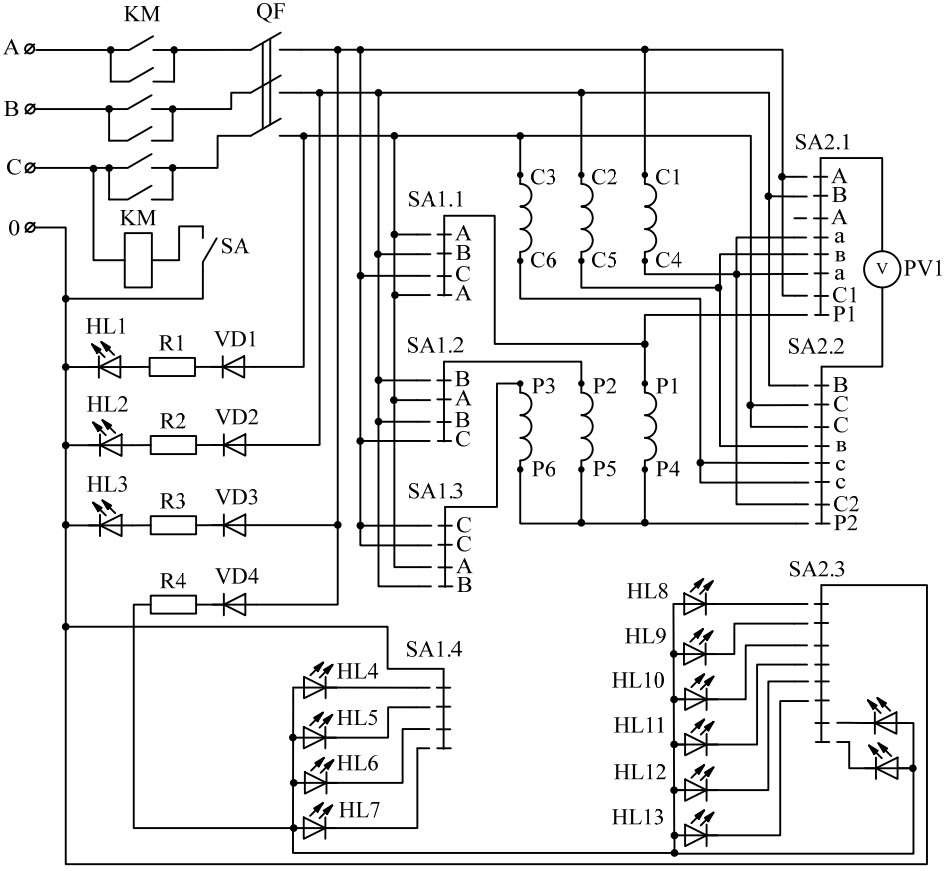
Схема електрична принципова стенда для дослідження індукційного
регулятора
Паспортні дані електричних машин
Індукційний регулятор напруги:
тип – Фр–41А;
Sн = 0,5кВА; m = 3; f = 50 Гц; /Y = 220/380 В; І1 = 1,31 А/2,24 А;
U2лн = 38405 В.
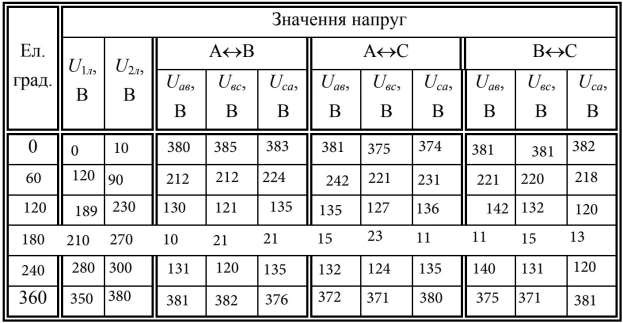
Таблиця 6.1 – Експериментальні дані для побудови вихідної
характеристики індукційного регулятора
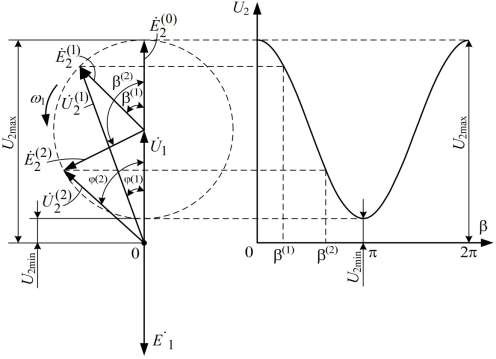
Векторна діаграма фазних напруг і ЕРС для однієї фази
Висновок: Під час виконання лабораторної роботи я вивчив будову і принцип роботи індукційного регулятора, методику зняття вихідних характеристик регулятора.
Контрольні запитання
1. Будова асинхронної машини. Режими її роботи.
Будова асинхронної машини
Асинхронна машина складається з двох основних частин:
Статор:Неподвижна частина машини, що містить обмотку статора. Ця обмотка, підключена до мережі змінного струму, створює обертове магнітне поле.
Статор асинхронної машини
Ротор:Рухома частина машини, що містить обмотку ротора (клітка білки) або інший тип обмотки. Ця обмотка під дією обертового магнітного поля статора наводить в собі ЕРС, що створює струм в роторі.
Ротор асинхронної машини
Статор і ротор асинхронної машини розділені повітряним зазором.
Асинхронна машина може працювати в трьох основних режимах:
Двигунний режим: Найпоширеніший режим роботи, при якому обертове магнітне поле статора обертається швидше, ніж ротор. Це призводить до ковзання, яке генерує обертаючий момент на валу ротора.
Генераторний режим: У цьому режимі ротор обертається швидше, ніж обертове магнітне поле статора. Це призводить до негативного ковзання, яке генерує ЕРС в обмотці ротора, що може бути використано для живлення навантаження.
2. Робота асинхронної машини при нерухомому роторі в режимах холостого ходу, короткого замикання і навантаження. Приведення параметрів ротора до статора.
Робота асинхронної машини при нерухомому роторі Режим холостого ходу
При нерухомому роторі (n = 0) ковзання s = 1.
В цьому режимі:
Електромагнітний момент: M = 0 Нм. Оскільки ротор не обертається, то не виникає корисної механічної роботи.
Індуктивний струм ротора: I2 = 0 А. Ротор не рухається, тому в ньому не індукується ЕРС.
Активна потужність: P2 = 0 Вт. Немає корисної механічної роботи, тому активна потужність, що споживається ротором, дорівнює нулю.
Реактивна потужність: Q2 = Q1. Ротор і статор споживають однакову реактивну потужність для створення магнітного поля.
Коефіцієнт потужності: cosφ2 = 0. Відсутність корисної механічної роботи призводить до низького коефіцієнта потужності. Режим короткого замикання В цьому режимі:
Електромагнітний момент: M = Mкз. Максимальний момент, який може розвинути асинхронна машина.
Індуктивний струм ротора: I2 = Iкз. Великий індуктивний струм, що призводить до значного нагрівання ротора.
Активна потужність: P2 = Pкз. Висока активна потужність, що споживається ротором, через значний індуктивний струм.
Реактивна потужність: Q2 = Qкз. Висока реактивна потужність, що споживається ротором, через магнітне поле.
Коефіцієнт потужності: cosφ2 = 0. Низький коефіцієнт потужності через відсутність корисної механічної роботи.
3. Призначення, будова і принцип роботи індукційного регулятора.
Індукційний регулятор призначений для плавного та безступеневого регулювання змінного струму в колах змінного струму. Їх використовують у різних галузях, таких як:
Електроприводи: регулювання швидкості обертання електродвигунів Освітлення: регулювання яскравості світильників
Нагрівання: регулювання температури нагрівальних елементів
Зарядні пристрої: регулювання струму зарядки акумуляторів
Індукційний регулятор складається з двох основних компонентів:
Індуктивний трансформатор: Це трансформатор з регульованим повітряним зазором. Повітряний зазор змінюється за допомогою механічного приводу, що призводить до зміни індуктивності трансформатора.
Випрямляч: Випрямляч перетворює змінний струм на постійний струм, який використовується для керування механічним приводом.
Індукційний регулятор працює за принципом зміни індуктивності індуктивного трансформатора. Коли індуктивність трансформатора змінюється, змінюється ЕРС, що індукується в його вторинній обмотці. Ця
ЕРС використовується для живлення навантаження.
4. Схеми з’єднання обмоток трифазного індукційного регулятора, методика маркування початків і кінців його фаз.
Трифазні індукційні регулятори напруги (ІРН) мають широке застосування завдяки своїй простоті, надійності та можливості плавного регулювання напруги. Їхніми основними елементами є статор і ротор, кожен з яких має три обмотки.
У схемі "зірка" початки всіх трьох обмоток статора з'єднуються в одній точці, яка називається нейтральною. Кінці обмоток підключаються до трьох вихідних клем регулятора.
Ця схема забезпечує симетричне регулювання напруги на всіх трьох фазах. Її перевагами є простота реалізації та низький рівень гармонік.
У схемі "трикутник" кінці обмоток статора з'єднуються послідовно, утворюючи замкнутий трикутник. Початки обмоток підключаються до трьох вихідних клем регулятора.
Ця схема забезпечує більш високу потужність регулятора при однаковій конструкції статора в порівнянні зі схемою "зірка".
Векторні діаграми трифазного індукційного регулятора в режимі холостого ходу при правильній і неправильній схемах ввімкнення та їх обґрунтування.
У правильній схемі ввімкнення первинні обмотки індукційного регулятора з'єднуються зіркою, а вторинні - зіркою або трикутником. В цьому режимі ЕРС вторинних обмоток підсумовуються геометрично, утворюючи трифазну систему ЕРС, яка збігається за напрямком з ЕРС первинних обмоток.
У неправильній схемі ввімкнення первинні обмотки індукційного регулятора з'єднуються зіркою, а вторинні - трикутником. В цьому режимі ЕРС вторинних обмоток не підсумовуються геометрично, а утворюють дві трифазні системи ЕРС, які обернені одна до одної.
Теоретично пояснити співвідношення між геометричними і електричними градусами в електричній машині.
В електричних машинах геометричні градуси і електричні градуси використовуються для опису кутових величин, пов'язаних з розташуванням обмоток, магнітних полів та інших компонентів.
Геометричні градуси вимірюють кут в градусах між двома точками на площині.
Електричні градуси вимірюють частку електричного кола, що охоплюється кутом. Одне електричне коло дорівнює 360 градусам.
8. Призначення, будова, схема з'єднання обмоток і принцип роботи фазорегулятора.
Фазорегулятор - це пристрій, призначений для плавного регулювання кута фазового зсуву між двома синусоїдальними ЕРС. Він використовується в різних електротехнічних системах, таких як:
Системи керування потужністю: Фазорегулятори використовуються для регулювання активної та реактивної потужності, що передається між двома мережами.
Електроприводи: Фазорегулятори використовуються для регулювання швидкості обертання електродвигунів змінного струму.
Випрямлячі: Фазорегулятори використовуються для регулювання вихідної напруги випрямлячів.
Вимірювальні прилади: Фазорегулятори використовуються для вимірювання кута фазового зсуву між двома сигналами.
Фазорегулятор складається з двох основних компонентів:
Трансформатор: Трансформатор використовується для отримання двох синусоїдальних ЕРС з однаковою амплітудою, але з різницею фазового кута.
Регулюючий елемент: Регулюючий елемент використовується для зміни кута фазового зсуву між двома ЕРС.
Роботу виконав: студент 4 курсу ЕЕЕ-20001б Ткаченко Денис