

10.3. Коефіцієети запасу для електродвигунів вентиляторів
Потужність вентилятора, кВт |
до 0,5 |
0,6 – 1 |
1,1 – 2 |
2,1 – 3 |
3,1 та більше |
Коефіцієнт запасу для вентиляторів: відцентрових осьових |
1,5 1,2 |
1,3 1,15 |
1,3 1,1 |
1,15 1,05 |
1,1 1,05 |
10.2.5. Регулювання продуктивності вентиляційних установок
Повітрообмін у виробничих приміщеннях регулюють зміною продуктивності вентиляторів.
Таке регулювання може бути:
зміною кількості одночасно працюючих вентиляторів;
зміною частоти обертання вентиляторів;
зміною поперечного перерізу повітропроводу.
Наведені методи регулювання випливають із залежності:
 ,
(10.32)
,
(10.32)
де N – кількість вентиляторів, які працюють в приміщенні, шт; v – швидкість руху повітря в повітропроводі, м/с; S – поперечний переріз повітропроводу, м2.
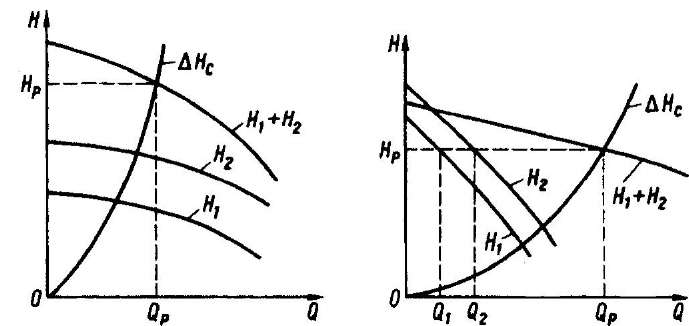
При регулюванні тиску чи подачі вентиляційної установки шляхом вмиканням на один повітропровід двох вентиляторів меншої потужності їх можна з'єднувати паралельно і послідовно. Для забезпечення стійкої паралельної роботи двох вентиляторів на робочій ділянці аеродинамічної характеристики повинна бути така ділянка, на якій при збільшенні продуктивності створюваний вентилятором тиск зменшується. При послідовному з'єднанні вентиляторів один із них може регулюватись дроселюванням аж до повного перекривання. Енергетичні показники установки будуть вищі, ніж при дроселюванні одного ізольованого вентилятора. Сумарні характеристики вентиляторів при їх послідовному та паралельному з'єднанні наведені на рис. 10.16.
За такою схемою працюють дахові вентилятори, тобто радіальні або осьові вентилятори, розміщені на вертикальній осі в короткому патрубку в отворі покрівлі, а також осьові вентилятори серії ВО, що розміщуються в нижній частині поздовжніх стін тваринницьких, птахівницьких або інших виробничих приміщень
а б
Рис. 10.16. Сумарні характеристики двох вентиляторів:
а – послідовне з'єднання; б – паралельне з'єднання
Регулювати частоту обертання двигуна вентилятора можна зміною підведеної напруги, числа пар полюсів та частоти струму.
Спосіб регулювання частоти обертання приводного двигуна зміною напруги на статорі базується на квадратичній залежності між моментом асинхронного двигуна і величиною напруги.
При ковзаннях, менших за критичне s<sk, момент електродвигуна пропорційний квадрату напруги і ковзанню:
 .
(10.33)
.
(10.33)
При постійному моменті у відносних одиницях можна записати:
 .
(10.34)
.
(10.34)
Таким чином, зниження напруги призводить до зниження частоти обертання приводного двигуна і робочого колеса вентилятора.
Якщо змінювати напругу на статорній обмотці асихронних двигунів без навантаження (без вентилятора), то кутова швидкість ротора практично змінюватися не буде.
При зміні напруги критичне ковзання двигуна залишається практично незмінним (при незмінному значенні Xk) і дорівнює
 , (10.35)
, (10.35)
де R1 – активний опір обмотки статора; R2/ – зведений активний опір обмотки ротора; Xk – сумарний індуктивний опір обмоток статора і ротора.
Зміна напруги призводить до зміни коефіцієнта жорсткості β механічної характеристики двигуна, який визначається за виразом:
 , (10.36)
, (10.36)
де М – момент двигуна; 𝜔 – кутова швидкість.
Момент двигуна залежить від таких параметрів:
 , (10.37)
, (10.37)
де Е2 – електрорушійна сила в обмотці ротора при ковзанні, рівному одиниці. Цей параметр можна виразити так:
 ;
s
– ковзання, s=(ω0-ω)/ω0.
Підставивши значення Е2
та s у вираз (10.37),
отримаємо:
;
s
– ковзання, s=(ω0-ω)/ω0.
Підставивши значення Е2
та s у вираз (10.37),
отримаємо:
 . (10.38)
. (10.38)
Взявши похідну з виразу (10.38), отримаємо коефіцієнт жорсткості механічної характеристики асинхронного двигуна:
 . (10.39)
. (10.39)
Якщо вважати параметри ротора сталими, то коефіцієнт жорсткості механічної характеристики β знижується при зменшенні магнітного потоку в квадратичній залежності, оскільки магнітний потік Ф прямо пропорційно залежить від напруги на статорі двигуна. Отже, зміна напруги на статорі призводить до значного зменшення коефіцієнта жорсткості та перевантажувальної здатності двигуна. При вентиляторній механічній характеристиці робочої машини перевантажувальна здатність залишається достатньою для стабільної роботи електровентилятора.
Перехід на штучні механічні характеристики двигуна супроводжується збільшенням його ковзання, яке при низьких напругах стає більшим за критичне ковзання. При цьому система двигун – вентилятор залишається статично стійкою.
При регулюванні кутової швидкості двигуна зміною напруги на статорі застосовують двигуни з м’якими механічними характеристиками (рис. 10.17). Регулювальна характеристика вентилятора показана на рис. 10.18.

 Рис.
10.18. Регулювальна характеристика
вентилятора
Рис.
10.18. Регулювальна характеристика
вентилятора
ВО-Ф-7,1А
При зміні числа пар полюсів змінюється частота обертання приводного двигуна (вентилятора). Цей спосіб регулювання продуктивності вентиляторів знайшов застосування у вентиляційних установках продуктивністю 50000 та 100000 м3/год (вентилятори, які використовуються для продування скирти сіна, в приміщеннях для вирощуванні свиней, великої рогатої худоби).
Перевагою цього метода регулювання є відсутність втрат на регулювання та збереження жорсткості механічних характеристик (рис. 10.19, а). До недоліків можна віднести ступінчасте регулювання продуктивності вентилятора та погіршення техніко-економічних показників в області малих ковзань.
При зміні частоти обертання колеса вентилятора характеристика повітропроводу не змінюється і робоча точка вентилятора переміститься по параболі, що збігається з характеристикою повітропроводу (рис. 10.19). При цьому коефіцієнт корисної дії вентилятора залишається незмінним. Потужність двигуна при зміні частоти обертання змінюється за кубічною залежністю. У двошвидкісних двигунів серії АИ є виконання для привода робочих машин з вентиляторною механічною характеристикою. Характерною ознакою цих двигунів є те, що потужність у них на вищій частоті обертання значно більша за потужність на нижчій частоті обертання. Для двигунів з числом полюсів 4/2, 8/4 діапазон регулювання становить 1:2. При такому діапазоні регулювання потужність на вищій частоті обертання визначається залежністю
 . (10.40)
. (10.40)
Для двигунів з числом полюсів 8/6 діапазон регулювання дорівнює 1 : 1,33. Потужність на вищій частоті обертання визначається так:
 . (10.41)
. (10.41)
Співвідношення
потужностей (10.40), (10.41) зберігається в
двошвидкісних двигунах, призначених
для привода вентиляторів. Так, двигуни
АИР112М4/2У2 та АИР112М8/6У2 мають відповідно
співвідношення потужностей Рвищ=7,9Рниж
і Рвищ=2,5Рниж. Отже,
згадані двигуни при зміні частоти
обертання працюють практично з повним
навантаженням на відміну від двошвидкісних
двигунів загального призначення, в яких
потужність на вищій частоті обертання
більша на 30-50 % за потужність при нижчій
частоті обертання. Тому двошвидкісні
двигуни загального призначення для
привода вентиляторів застосовувати не
слід. При нижчій частоті обертання вони
будуть працювати з малим навантаженням
і, як наслідок, з низькими енергетичними
показниками.
Отже,
згадані двигуни при зміні частоти
обертання працюють практично з повним
навантаженням на відміну від двошвидкісних
двигунів загального призначення, в яких
потужність на вищій частоті обертання
більша на 30-50 % за потужність при нижчій
частоті обертання. Тому двошвидкісні
двигуни загального призначення для
привода вентиляторів застосовувати не
слід. При нижчій частоті обертання вони
будуть працювати з малим навантаженням
і, як наслідок, з низькими енергетичними
показниками.
Регулювати продуктивність вентилятора можна зміною частоти струму, оскільки частота обертання двигуна прямо пропорційна частоті струму живлячої мережі.
Нині
розроблено багато малогабаритних
перетворювачів частоти, які дають
можливість їх установки на окремі
вентилятори. Для того, щоб при регулюванні
частоти обертання приводних двигунів
вентиляторів їх енергетичні показники
були оптимальними (близькими до
номінальних значень), необхідно змінювати
одночасно напругу та частоту струму за
законом
 .
.
При цьому рівняння механічної характеристики двигуна має вид:
 ,
(10.42)
,
(10.42)
де
 – відносне значення напруги;
– відносне значення напруги;
 – відносне значення частоти струму;
– відносне значення частоти струму;
 – відповідно, критичне ковзання двигуна,
активні опори фази статора та ротора,
зведені до статора.
– відповідно, критичне ковзання двигуна,
активні опори фази статора та ротора,
зведені до статора.
Регулювальна діаграма вентилятора при зміні частоти струму показана на рис. 10.19, б.

Рис. 10.19. Регулювальні діаграми вентиляторів: а – при зміні числа пар полюсів; б – при зміні частоти струму
Продуктивність вентиляційної установки можна регулювати, змінюючи поперечний переріз повітропроводу за допомогою заслінки.
При номінальній частоті обертання вентилятора без заслінки продуктивність вентилятора Lp=Lн, розрахунковий напір Hp=Hн (рис. 10.20, крива 1). При застосуванні заслінки збільшується опір у повітропроводі (крива 2), що призводить до зниження продуктивності вентилятора.
У повітропроводі на заслінці виникає
перепад опорів:
повітропроводі на заслінці виникає
перепад опорів:
 ,
(10.43)
,
(10.43)
що призводить до втрат потужності:
 ,
(10.44)
,
(10.44)
де
 – коефіцієнт, який залежить від ККД
вентилятора і передачі,
– коефіцієнт, який залежить від ККД
вентилятора і передачі,
 .
.
Прийнявши, що характеристики 1 і 2 є параболами, можна записати:
 .
(10.45)
.
(10.45)
Тоді втрати потужності з урахуванням (10.45) будуть:
 ,
(10.46)
,
(10.46)
звідки одержимо:
 .
(10.47)
.
(10.47)
Прийнявши,
що
 ,
, ,
втрати потужності будуть:
,
втрати потужності будуть:
 .
(10.48)
.
(10.48)
Для визначення найбільших втрат потужності розв’яжемо рівняння:
 ,
(10.49)
,
(10.49)
звідки
 .
.
Підставивши в формулу (10.48) qmax, отримаємо:
 .
(10.50)
.
(10.50)
Таким чином, при цьому способі регулювання продуктивності вентиляційних установок максимум втрат складає 38,5 % від номінальної потужності, що в 2,25 рази більше порівняно з першими двома способами.