

Курсова_робота_Кудрук_Давид_1_варіант
.docxНАЦІОНАЛЬНИЙ УНІВЕРСИТЕТ БІОРЕСУРСІВ І ПРИРОДОКОРИСТУВАННЯ УКРАЇНИ
ІНСТИТУТ ЕНЕРГЕТИКИ, АВТОМАТИКИ і ЕНЕРГОЗБЕРЕЖЕННЯ
Кафедра автоматики та робототехнічних систем ім. акад. І.І.
Мартиненка
КУРСОВА РОБОТА
з дисципліни: Теоретичні основи автоматики
Виконав студент Керівник курсової
3 курсу групи ЕЕЕ-20001б роботи
Кудрук Д. Р. Гладкий А.М.
КИЇВ - 2022
ЗМІСТ
Вихідні дані 3
Розробка функціональної схеми 4
Передаточні функції елементів системи 5
Структурно-алгоритмічна схема САР 6
Передаточні функції САР 7
Побудова перехідного процесу та визначення Кр 8
Частотні характеристики і стійкість системи 10
Оцінка якості регулювання 13
Середнє квадратичне відхилення вихідної величини при дії на систему випадкового збурення 14
Висновки 15
1 ВИХІДНІ ДАНІ
Система автоматичного регулювання складається з: об’єкта керування з параметрами:
коефіцієнт передачі kо, постійна часу То;
коефіцієнт передачі за збуренням kоf. та функціональних елементів:
а) сприймаючий елемент: коефіцієнт передачі kд, постійна часу Тд; б) управляючий елемент (П-регулятор): коефіцієнт передачі kр;
в) виконавчий механізм: коефіцієнт передачі kв, постійна часу Тв.
Завдання:
Побудувати функціональну схему системи автоматичного регулювання.
Визначити передаточні функції елементів системи.
Розробити структурно-алгоритмiчну схему САР.
Визначити передаточні функції САР: розімкнутої системи; замкнутої системи за заданою дією, за збуренням, за похибкою.
Побудувати перехідний процес САР та визначити Кр управляючого елемента, який забезпечує перерегулюваня перехідного процесу в межах 20-30%/
Розрахувати АФЧХ, дослідити стійкість і визначити запаси стійкості САР. Вимоги: запас стійкості за амплітудою 10...20 дБ, за фазою - 30-60 град.
Визначити показники якості роботи системи.
Варіант 13
№ |
Об’єкт керування |
Сприймаючий елемент |
Виконавчий механізм |
Sf(ω) |
|||||
ko |
kof |
To |
kд |
Тд |
kв |
Tв |
𝑎1 |
𝑎∗ |
|
13 |
2.3 |
0,14 |
170 |
0,3 |
60 |
1.3 |
80 |
0,14 |
0,4 |
2 РОЗРОБКА ФУНКЦІОНАЛЬНОЇ СХЕМИ
Функціональною схемою САР називається схема, на якій зображенні функціональні елементи системи та зв’язки між ними.
Задана САР складається з таких функціональних елементів: СЕ - сприймаючий елемент;
![]() - елемент
порівняння; УЕ
- управляючий елемент;
ВМ - виконавчий механізм;
ОК -
об'єкт керування.
- елемент
порівняння; УЕ
- управляючий елемент;
ВМ - виконавчий механізм;
ОК -
об'єкт керування.
Функціональна схема досліджуваної САР наведена на рис. 2.1.

Рис. 2.1. Функціональна схема досліджуваної САР
3 ПЕРЕДАТОЧНІ ФУНКЦІЇ ЕЛЕМЕНТІВ СИСТЕМИ
Передаточною функцією елемента називається відношення Лапласових зображень його вихідної величини до вхідної при нульових початкових умовах.
Проаналізувавши завдання, отримаємо такі передаточні функції для елементів системи:
об'єкт керування; 𝑊𝑜(𝑝)=
об'єкт
керування
за збуренням;
𝑊𝑜𝑓(𝑝)=
сприймаючий елемент; 𝑊д(𝑝)=
управляючий елемент (П-регулятор) Wp(p)=kp
виконавчий механізм 𝑊в(𝑝)=
Таким чином, об’єкт керування, датчик, виконавчий механізм є інерційними ланками першого порядку, а П-регулятор - пропорційною ланкою.
4 СТРУКТУРНО-АЛГОРИТМІЧНА СХЕМА САР
Структурно-алгоритмічна схема являє собою графічне зображення динамічних властивостей функціональних елементів системи, яке описує математичну модель процесу управління.
Рис. 4.1. Структурно-алгоритмічна схема CAP
5 ПЕРЕДАТОЧНІ ФУНКЦІЇ САР
Передаточна функція розімкнутої CAP визначається формулою для послідовно з'єднаних ланок
𝑊(𝑝)= 𝑊д(𝑝) ⋅ 𝑊𝑝(𝑝) ⋅ 𝑊 в(𝑝) ⋅ 𝑊 𝑜(𝑝)=

Передаточна функція замкнутої системи визначається формулою для з'єднання зі зворотнім зв'язком
𝑊з(𝑝)=

Передаточна функція замкнутої системи відносно збурюючої дії f(t) запишеться так:
𝑊𝑓(𝑝)=

Передаточна функція замкнутої системи відносно похибки запишеться так:
𝑊𝛥(𝑝)=
6 ПОБУДОВА ПЕРЕХІДНОГО ПРОЦЕСУ ТА ВИЗНАЧЕННЯ КР
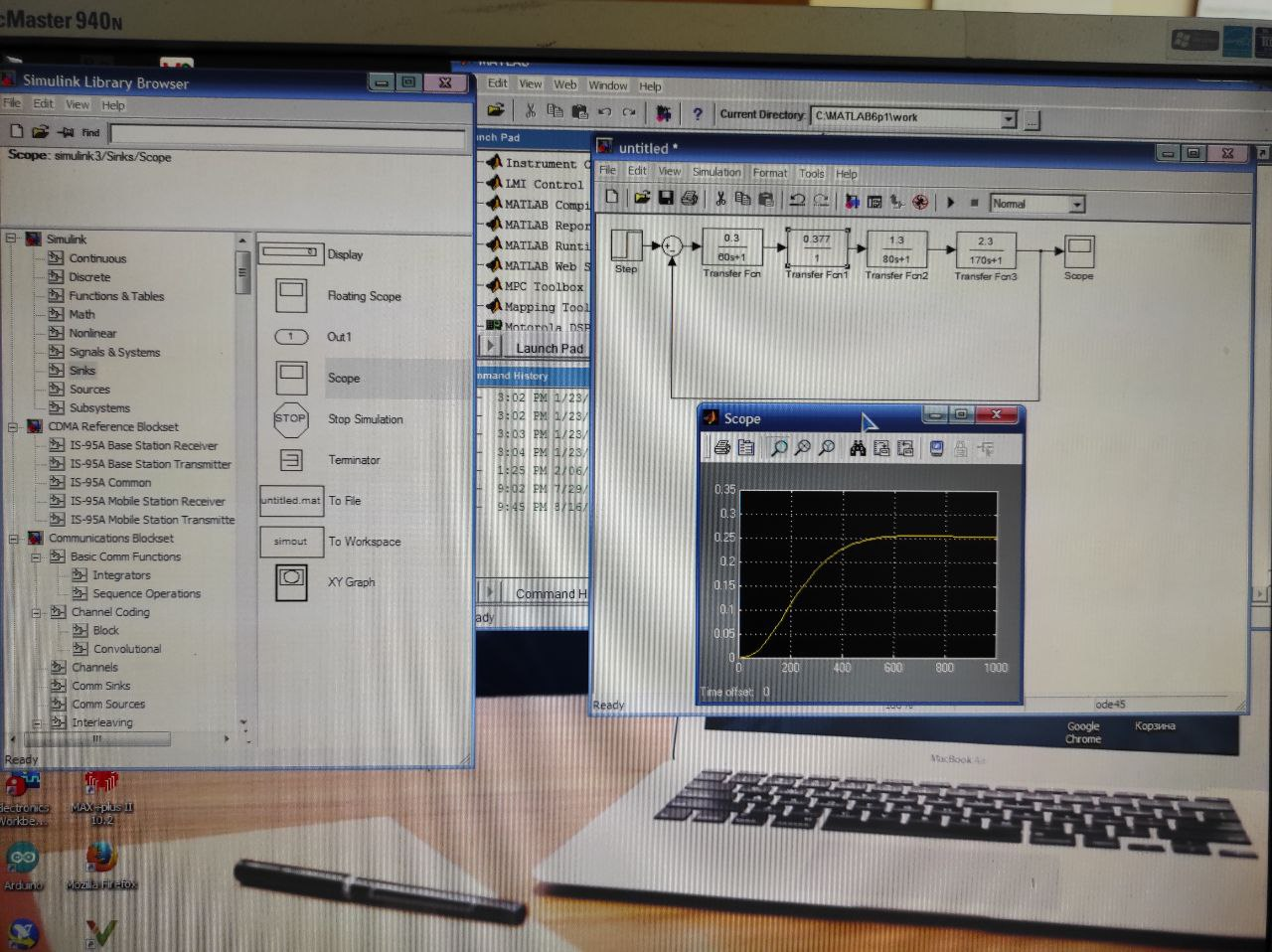
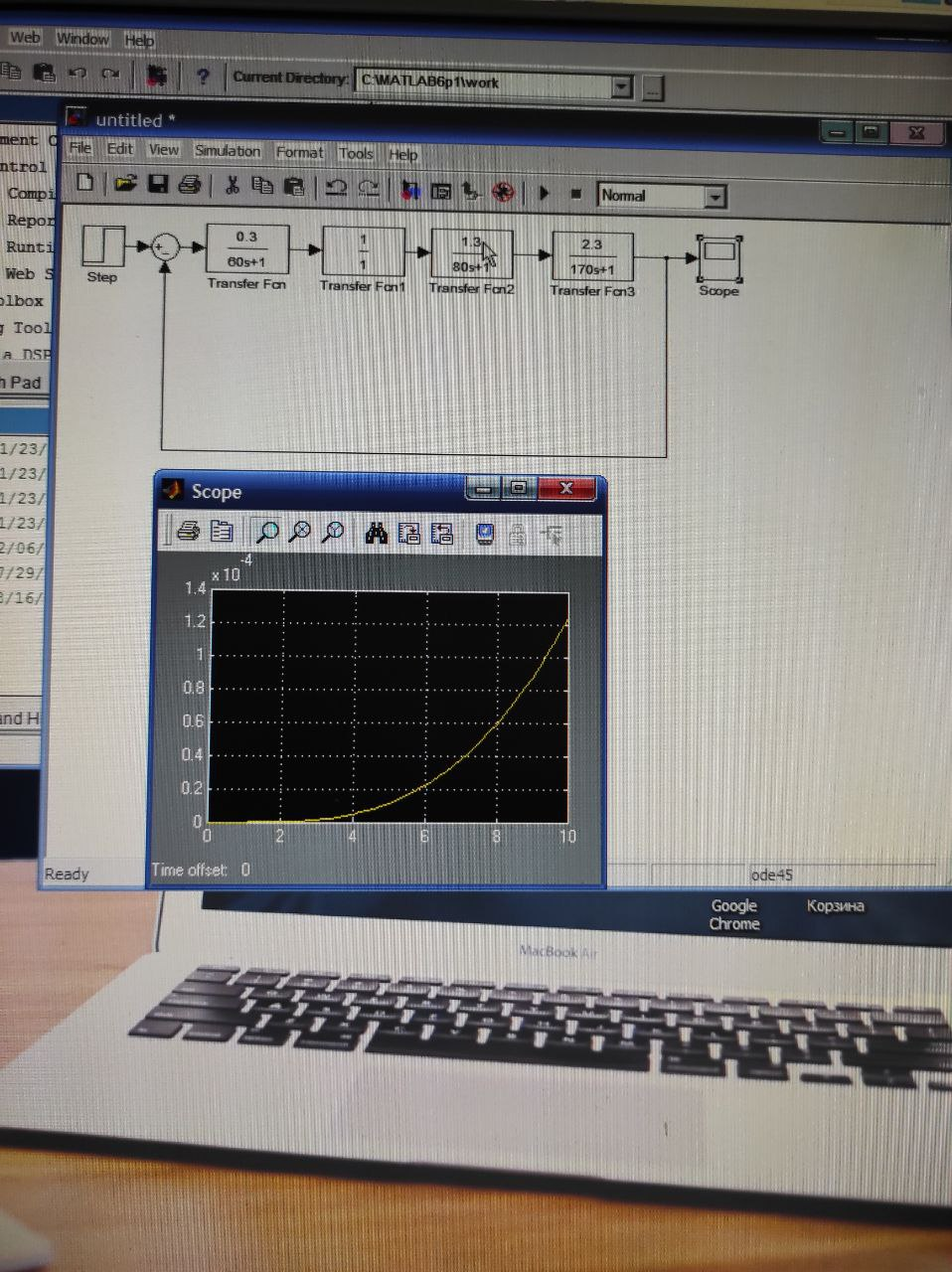
Дослідження перехідного процесу САР будемо проводити з використанням математичного середовища MATLAB Simulink. Для цього складемо схему моделі автоматичної системи (рис. 6.1).
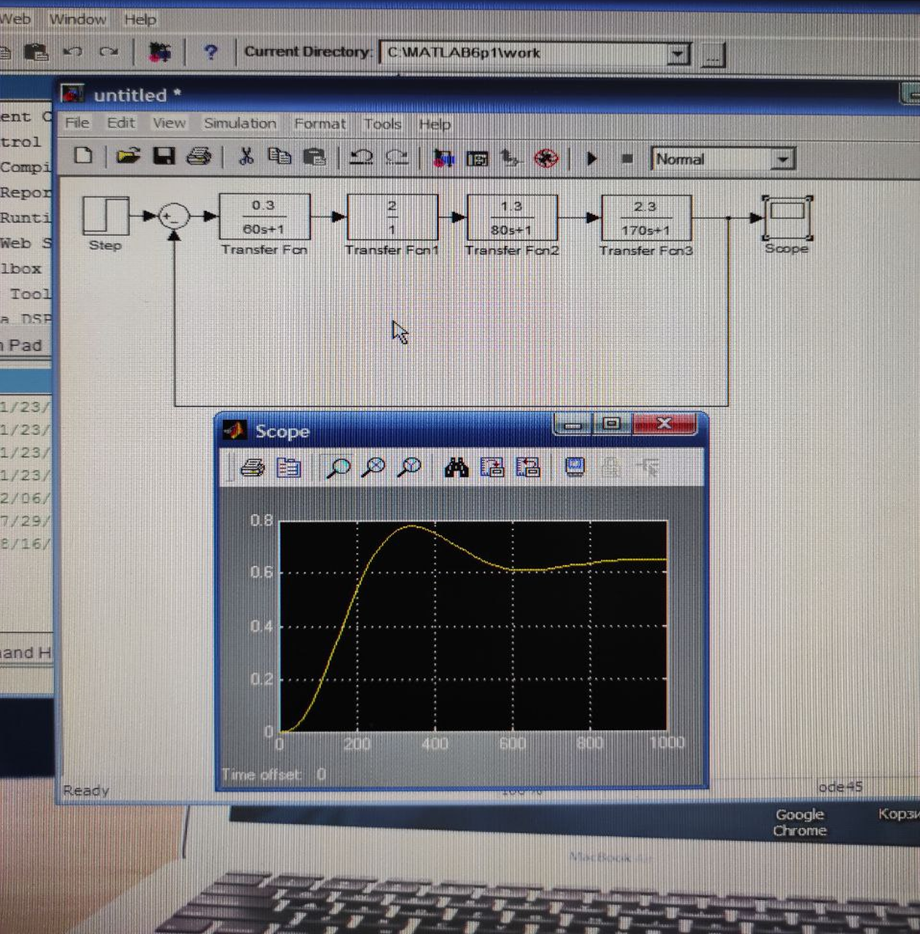
Рис. 6.1. Схема моделі САР Отримуємо графік перехідного процесу (рис. 6.2).
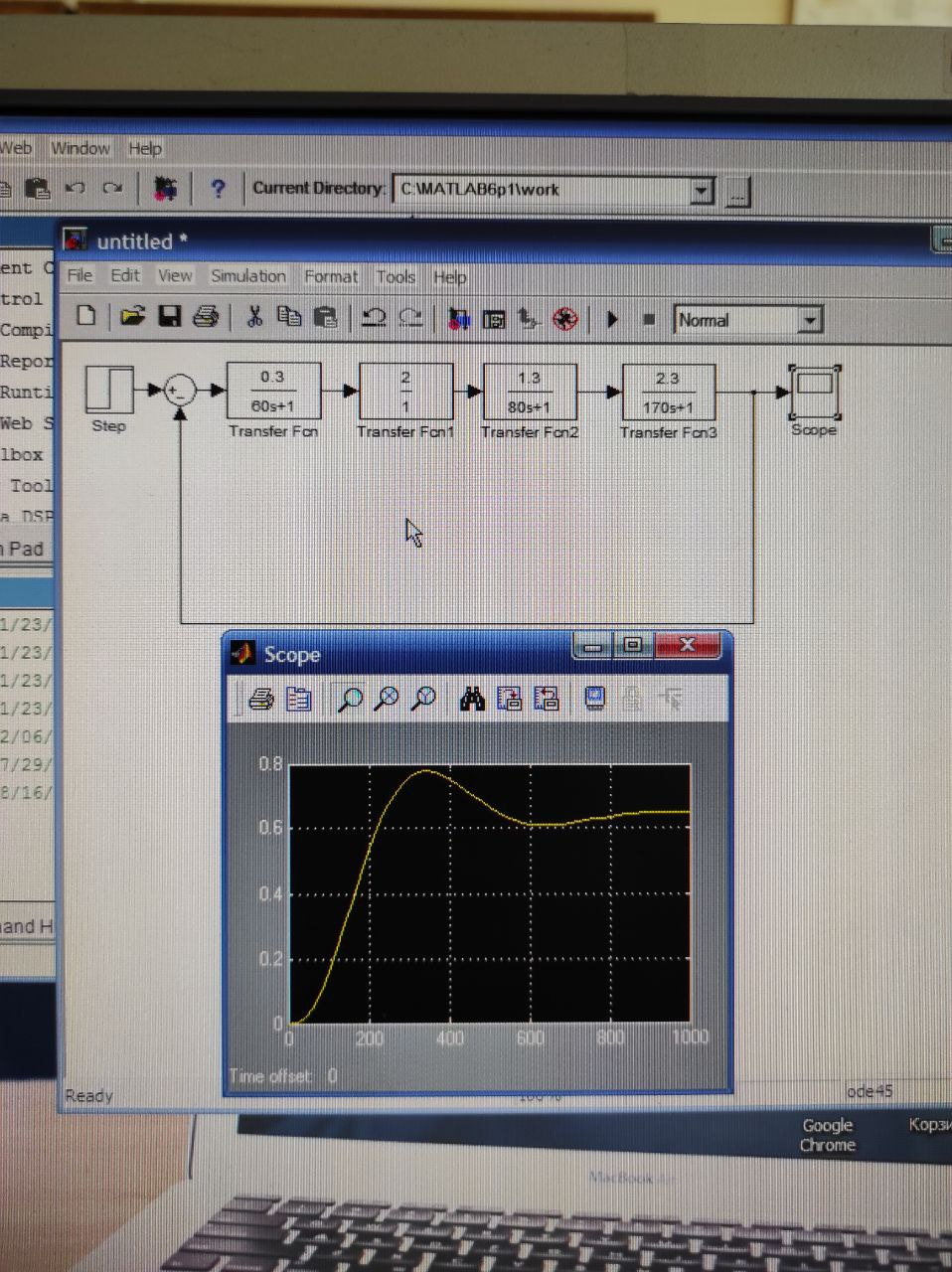
Рис. 6.2. Осцилограма перехідної функції Отримуємо kp=2,6; kз = 𝑘д ∗ 𝑘𝑝 ∗ 𝑘в ∗ 𝑘𝑜 = 2.332
Тоді передаточні функціі розімкнутої та замкнутої CAP дорівнюватимуть:
𝑊(𝑝)=
(6.1)
𝑊 з(𝑝)
=

7 ЧАСТОТНІ ХАРАКТЕРИСТИКИ І СТІЙКІСТЬ СИСТЕМИ
Частотна передаточна функція - це функція W(j), отримана з передаточної функції системи W(p) при підстановці p= j.
Після підстановки p=j в формулу (5.1) частотна передаточна функція розімкненої системи запишеться у вигляді:
𝑊(𝑗𝜔)=



Звідси знаходимо вирази для дійсної та уявної частин частотної передаточної функції (7.1), які використовують для побудови АФЧХ:
Запас стійкості за модулем L в логарифмічному масштабі обчислюють за значенням модуля частотної передаточної функції │W(jωо)│ в точці ω=ω0 перетину годографом дійсної від’ємної осі, яке визначаємо з графіка: ω=0,020.
L 20lg
1
| W ( jo ) |
, дБ (7.8)
8 ОЦІНКА ЯКОСТІ РЕГУЛЮВАННЯ
Якість роботи системи автоматичного регулювання оцінюється за стійкістю, показниками якості перехідного процесу, точністю в усталеному режимі. До основних показників якості перехідного процесу відносяться: час регулювання, перерегулювання, коливальність процесу.
Дослідження стійкості системи проведено при виконанні п.7. Запаси стійкості за модулем і фазою складають:
φ = 80 град.
Основні показники якості регулювання були визначені у розділі 6:
час регулювання tp = 385 c;
 -
перерегулювання
𝜎%
=
ℎ𝑚𝑎𝑥−ℎ(∞)
∗
100%
=
0,76−0,6
≈
26%;
-
перерегулювання
𝜎%
=
ℎ𝑚𝑎𝑥−ℎ(∞)
∗
100%
=
0,76−0,6
≈
26%;
коливаня N = 1.
ℎ(∞)
0,6
Точність автоматичної системи прийнято оцінювати за значенням похибки
в статичному режимі й усталеному динамічному режимі.
Статична похибка в усталеному режимі визначається передаточною функцією замкнутої системи відносно похибки (5.4) при р=0:
ст
W
(0)
1
1W (0)
(8.1)

ст
Для досліджуваної САР отримуємо 𝛥 = 11+2.332
= 0.3.
Складова статичної похибки від збурюючої дії розраховується за формулою:
Для досліджуваної САР отримуємо 𝛥𝑓
= 0,01
1+2.332
= 0.003.
9 СЕРЕДНЄ КВАДРАТИЧНЕ ВІДХИЛЕННЯ ВИХІДНОЇ ВЕЛИЧИНИ ПРИ ДІЇ НА СИСТЕМУ ВИПАДКОВОГО ЗБУРЕННЯ
𝑏1
= 𝑎1
∗ (𝑘
2
0𝑓 ∗ Тд ∗ Тв)
= 0,14 ∗
(0.14 ∗ 60 ∗ 80)2 = 63221.8
2 2
𝑏2 = −𝑎1 ∗ (𝑘0𝑓 ∗ (Тд + Тв)) = −0,14 ∗ (0,14 ∗ (60 + 80)) =-53.8
𝑏3
= 𝑎1
∗ (𝑘
0𝑓
)2 = 0,14 ∗ (0,14)2 =0.0027
𝑎0 = Тд ∗ Тв ∗ Т𝑜 = 60 ∗ 80∗ 170 = 816000 =816*10^3
𝑎1 = Т𝑜 ∗ Тд + Т𝑜 ∗ Тв + Тв ∗ Тд = 170 ∗ 60 +170 ∗ 80 + 80∗ 60 =28600
𝑎2 = Тд + Тв + Т𝑜 = 60 + 80 + 170 =310
𝑎3 = 1 + 𝑘з = 1 + 2.332= 3.332


 10
ВИСНОВКИ
10
ВИСНОВКИ
Система автоматичного регулювання є стійкою. Загальний коефіцієнт передачі системи складає 2.332. Запас стійкості за фазою ∆𝜑 = 80°. Час регулювання системи 385 секунд. Коливальність
у
1. Система є точною, похибка в усталеному режимі 0,3. Середньоквадратичне відхилення вихідного сигналу при дії випадкового збурення на систему 𝜎2 = .
Оскільки запаси стійкості та
перерегулювання відповідають вимогам
завдання, можна зробити висновок, що
розроблена САР відповідає вимогам
завдання на курсову роботу.
.
Оскільки запаси стійкості та
перерегулювання відповідають вимогам
завдання, можна зробити висновок, що
розроблена САР відповідає вимогам
завдання на курсову роботу.