

Курсова робота Скудря М.О. Міев
.pdf1ПрезентЛекцМетрология-Стор1-Всі-311020-1.docx |
Дата печати 31.10.2020 12:57 |
3 |
|
Зміст |
|
Введення……………………………………………………………………………. 4
Змістовний модуль 1. Основи метрології та техніки вимірювань
Тема 1. Введення в предмет. Основи метрології та техніки вимірювань. Теоретичні основи і принципи. Концепції розвитку систем вимірювання в
електроенергетичних мережах.
Тема 2. Методи та засоби вимірювання. Основи теорії похибок.
Нормування метрологічних характеристик.
Тема 3. Основи теорії конструкції приладів. Структурне описання приладів вимірювання. Динамічні властивості елементів вимірювальних пристроїв (ВП). Розширення діапазону вимірювання.
Тема 4. Апаратно-вимірювальна частина пристроїв ВП. 1. Аналогова статична реалізація елементів. 2. ШІМ, імпульсна реалізація. Приклади. Тема 5. Методи цифрової реалізації Вимірювальних пристроїв. 3. Алгоритми цифрових мультиметрів. Похибкицифрової обробки сигналів. Тема 6. Універсальна схема вимірювання А/Ц перетворювач. Приклади.
Тема 7. Методи механічної реалізації вимірювальних пристроїв. 4. Основи теорії та конструкції приладів механічної реалізації.
Змістовний модуль 2. Вимірювання технологічних величин. Загальні способи вимірювання електричних величин
Тема 8. Огляд інтегральної елементної бази вимірювальних пристроїв. Тема 9. Інтелектуальні інформаційні датчики і протоколи обміну
інформації, типові структурні схеми.
Тема 10. Елементи електромагнітної сумісності при вимірюванні технологічних величин.
Тема 11. Типові цифрові процесорні ВП. Принцип дії та будова.
Тема 12. Осцилографічні вимірювання параметрів електричних сигналів.
Тема 13. Вимірювання неелектричних величин електричними методами. Тема 14. Типові структурні схеми засобів вимірювання неелектричних
величин прямого та зрівноважувального перетворення. Тема 15. Характеристики і параметри датчиків.
Курсовий проект (робота). Тема 16. Основи теорії побудови цифрових автоматичних системі пристроїв із функціями телемеханіки. Частина 1. Структурні схеми пристроїв, Частина 2. Огляд інтегральної бази, Частина
3. Електромагнітна сумісність, Частина 4. Реалізація на програмованих мікросхемах. Дивіться сторінки презентації – 3-4,20,29,44-46,48-49,51,58- 61,76,97,125-126,164-197,200-215,220-246,270-273,335-355.
Завдання курсового проекту – «Розробка системи автоматичного управління технологічним об’єктом. Застосування інформаційного датчика параметра…»
Зразок РГР ……………………………………………………
1ПрезентЛекцМетрология-Стор1-Всі-311020-1.docx |
Дата печати 31.10.2020 12:57 |
4 |
Перелік рекомендованої літератури: |
|
|
Рекомендована література
–основна:
1.Поліщук Є. С. Електричні вимірювання електричних та неелектричних
величин / Є. С. Поліщук. – К. : Вища шк., 1998. – 352 с.
2. Душина Е. М. Основы метрологии и электрический, измерения / Е. М. Душина. – Л. : Энергоатомиздат, 1997. – 480 с.
3.Резніченко Т. П. Контрольно-вимірювальні прилади. Лабораторний практикум / Резніченко Т. П., Рубан О. В. Щелочинін Я. Б. – К. : НАУ, 2006 – 130 с.
4.Панфилов В. А. Электрические измерения / В. А. Панфилов. – М. :
АСАDЕМА, 2006 – с.
5.Шляндин В. М. Цифровые измерительные устройства / В. М. Шляндин. М.
:Высш. шк., 1991. – с.
6.Закон України ″Про метрологію та метрологічнудіяльність″.
7.ДСТУ 2681 – 94 Метрологія, Терміни та визначення К., Держстандарт
України, 1994.
8. ДСТУ 2682 – 94 Метрологічне забезпечення, Основні положення К., Держстандарт України, 1998.
9. ДСТУ 2708 – 94 Повірка засобів вимірювань, Організація і порядок проведення К., Держстандарту України, 1998
10. ДСТУ 3215 – 95 Метрологічна атестація засобів вимірювальної техніки, Організація та порядок проведення К., Держстандарт України, 1998.
Інформаційні ресурси.
1.http://www.kmu.gov.ua - Кабінет Міністрів України.
2.http://www.portal.rada.gov.ua– Верховна Рада України.
3.http://www.google.com.ua - пошуковий сайт.
4.http://www.meta.ua - пошуковий сайт.
5.http://nubip.edu.ua/ - головна сторінка НУБіП України.
6.http://nubip.edu.ua/node/1376 - кафедра автоматики та робототехнічних систем ім. акад. І.І.Мартиненка.
7.http://elibrary.nubip.edu.ua – електронна наукова бібліотека НУБіП України.
8.http://energ.nauu.kiev.ua/ - навчально-інформаційний портал ННІ енергетики і автоматики
9.http://www.nbuv.gov.ua/ - національна бібліотека України імені В.І. Вернадського, Київ.
10.http://ntbu.ru/ - Государственная научно-техническая библиотека Украины.
1ПрезентЛекцМетрология-Стор1-Всі-311020-1.docx |
355 |
ТИПОВІ ФУНКЦІЇ СУЧАСНИХ ВИМІРЮВАЛЬНИХ СИСТЕМ
РЕЄСТРАТОРИ ПЕРЕХІДНИХ ПРОЦЕССІВ (ПП), МІКРОПРОЦЕСОРНІ ТА МІКРОКОНТРОЛЕРНІ КЕРУЮЧІ СИСТЕМИ ВИРОБНИЦТВОМ, ПЕРЕДАЧЕЮ
ІРОЗПОДІЛОМ ЕЛЕКТРОЕНЕРГІЇ
Типові задачі мікропроцесорних терміналів
аварійнийреєстратор осцилограм струмів із записом дискретних сигналів:
параметризуєма тривалість запису доаварійного та аварійного процесів;
роздільна здатність реєстратора по аналогових сигналах;
сумарна тривалість запису;
реєстратор максимальнихі мінімальних напруг; дискретних сигналів;
визначення місця ушкодження;
технічний облік електроенергії: - активної енергії; - у двох напрямках; реактивної енергії; - в 4 квадрантах;
візуалізація стану положення комутаційних апаратів.
© НУБіП, НікіфоровА.П., 2020

1ПрезентЛекцМетрология-Стор1-Всі-311020-1.docx |
355 |
© НУБіП, НікіфоровА.П., 2020

220
1ПрезентЛекцМетрология-Стор1-Всі-311020-1.docx
Структура интеллектуального измерительного средства
Цикл работы ИС состоит из нескольких этапов:
1.Интеллектуальное средство воспринимает исходную информацию о характере измерительных задач, об объектах и условиях измерения, предъявляемых требованиях и наложенных ограничениях. Вид ихарактер исходной информации должен обеспечивать возможность идентификации измерительной ситуации, определяемой свойствами объекта. В результате на первом этапе устанавливается множество алгоритмов измерения.
2.Выполняется идентификация ситуации и выбор наилучшего алгоритма из числа возможных.
3.Осуществление необходимых измерений.
БИЗ |
Инт И |
Магистраль
ВУ ИЧ
БИЗ – база измерительных знаний (включает все необходимые сведения, оформленные в виде соответствующих массивов, совокупности зависимостей, отображений и соотношений).
Инт. И. – Интеллектуальный интерфейс. Содержит все необходимое программное обеспечение для получения исходной информации, использования знаний, управления исполнительнойчастью и выдачей результатов измерения.
ВУ – вспомогательное устройство.
ИЧ – измерительная (исполнительная) часть. Реализует выбранную измерительную структуру.
© НУБіП, НікіфоровА.П., 2020

335 |
1ПрезентЛекцМетрология-Стор1-Всі-311020-1.docx |
ЛЕКЦІЯ 15 |
ХАРАКТЕРИСТИКИ І ПАРАМЕТРИ ДАТЧИКІВ |
Дивіться рисунки Лекцій 05, 09 |
на сторінках 98, 99, 193 Презентації лекції |
ЭТАП РГР |
Рисунок – Система автоматичного керування |
В общем случае перед тем, как приступить к разработке или выбору |
детектора (датчика), необходимо ответить наряд вопросов: |
- величина и тип измеряемых величин; |
- требуемая точность и разрешающая способность; |
- материал, из которого изготовлен или состоит объект |
(металл, пластмасса,жидкость, ферромагнетик, биологическая ткань и пр.); |
-диапазон измерений;
-условия окружающей среды, в которых должен работать датчик;
-потребляемая мощность датчика;
-размер пространства, отведенный под монтаж датчика;
-срок службы датчика;
-количество датчиков, которое необходимо изготовить, и стоимость одного устройства.
К наиболее часто используемым характеристикам датчиков относятся передаточная функция, диапазоны входных и выходных значений, точность,
наличие гистерезиса, нелинейность, разрешающая способность, выходной импеданс, динамические характеристики, величина сигнала возбуждения.
© НУБіП, Нікіфоров А.П., 2020

1ПрезентЛекцМетрология-Стор1-Всі-311020-1.docx |
355 |
ЭТАП РГР
1  U, В
U, В
3
1
2
1 - статичний;
2 - астатичний;
3 - коливальний загасаючий
0 |
t |
|
|
Uвих |
|
1 |
|
0 |
t |
|
РИСУНОК – ПЕРЕХІДНІ ПРОЦЕСИ В ИС |
A( ) |
|
K |
|
- амплітудно-частотна характеристика; |
|
|
|
||
1 2t 2 |
|
|||
|
|
|||
|
|
|
||
( ) arctgt |
|
- фазо-частотна характеристика; |
||
|
|
t |
|
|
h(t) K(1 et ) |
|
- імпульсна характеристика; |
||
© НУБіП,Нікіфоров А.П., 2020

1ПрезентЛекцМетрология-Стор1-Всі-311020-1.docx |
355 |
ЛЕКЦІЯ 03.
ОСНОВИ ТЕОРІЇ КОНСТРУКЦІЇ ПРИЛАДІВ
ЭТАП РГР
СТРУКТУРНЕ ОПИСАННЯ ПРИЛАДІВ ВИМІРЮВАННЯ
Исторически появились конструктивные виды реализации –
механическая, аналоговая, статическая, ШИМ, импульсная, цифровая
СТРУКТУРНИЙ ОПИС ІНФОРМАЦІЙНИХ ДАТЧИКІВ
СТРУКТУРА ДАТЧИКІВ: ЦИФРОВИЙ ФІЛЬТР І ПОРОГОВИЙ ПРИСТРІЙ
РИСУНОК – СХЕМА УЗАГАЛЬНЕНОЇ ЕКВІВАЛЕНТНО СТРУКТУРИ
РИСУНОК – СХЕМА ЦИФРОВОГО ИНФОРМАЦІЙНОГО ДАТЧИКА |
|
Ud |
|
Uz |
|
M |
t |
|
|
tint
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
Граничний |
Граничний елемент |
|||||
елемент відпадає |
спрацьовує |
|
||||
РИСУНОК – РОБОТА ДАТЧИКІВ В ЧАСІ
© НУБіП,Нікіфоров А.П., 2020

1ПрезентЛекцМетрология-Стор1-Всі-311020-1.docx |
355 |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
ФНЧ1 |
|
|
|
|
|
|
ПЕ3 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ВП ФНЧ1 ПЕ1
ФНЧ2 ПЕ2 ФІ
ФНЧ3 ВП
ФСЧС2 |
ПЕ3 |
∫ |
+- |
|
ВП – вимірювальний підсилювач ФНЧ – фільтр низької частоти ФІ – формувач імпульсів ОВЗ –одновибратор затримки ПЕ – пороговий елемент ВА – вимірювач амплітуди
РИСУНОК – СТРУКТУРНІЕЛЕМЕНТИІНФОРМАЦІЙНИХ ДАТЧИКІВ, ДЕТЕКТОРОВ
D |
Nцвп |
00,0 |
|
||
|
D1 |
|
|
|
x x |
Xi |
A |
|
N |
Xi |
|
|
D |
|
D Nесм
РИСУНОК – УЗАГАЛЬНЕНА СТРУКТУРНА СХЕМА ЦВП
© НУБіП,Нікіфоров А.П., 2020
1ПрезентЛекцМетрология-Стор1-Всі-311020-1.docx |
355 |
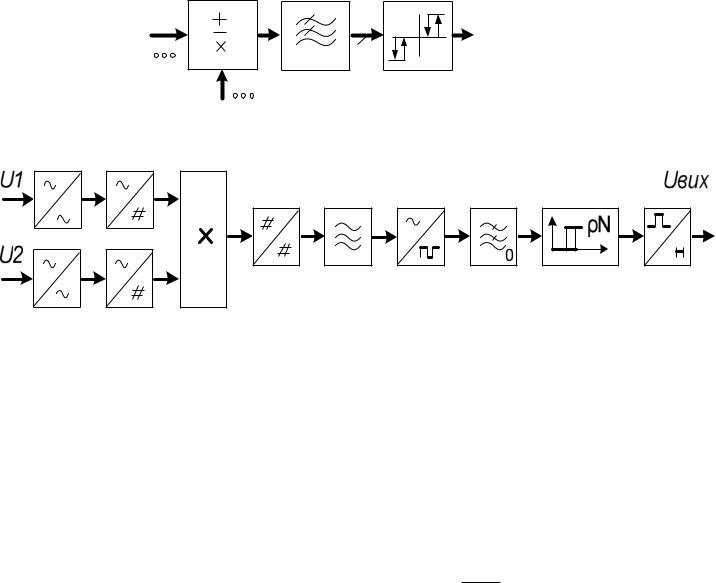
ОПИС ДВУХВХОДОВИХ ВИМІРЮВАЛЬНИХ ПРИСТРОЇВ
U1 |
ρ |
|
0 |
U2 |
US UВИХ |
РИСУНОК – УЗАГАЛЬНЕНА СХЕМА ДЕТЕКТОРА
РИСУНОК – СХЕМА ІНФОРМАЦІЙНИХ ДАТЧИК В
1. ДЛЯ АНАЛОГОВОЇ РЕАЛІЗАЦІЇ
U1=Asin( ), U2=Bcos( )
US = Asin( )+-*Bcos(
)+-*Bcos( ) = KAB [sin(
) = KAB [sin( -
- ) *+- cos(
) *+- cos( +
+ )]
)]
2. ДЛЯ ІМПУЛЬСНОЇ РЕАЛІЗАЦІЇ
Опис схем з тригером У момент t
US =x1 ( t) = D(t) C(t), x2(t) D(t )C(t)
3. ДЛЯ ЦИФРОВОЇ РЕАЛІЗАЦІЇ
US =U1*U2
4. ДЛЯ МЕХАНИЧНОЇ РЕАЛІЗАЦІЇ
US = JDn(t) MД (t) MC (t), |
D d /dt, |
де J – момент інерції обертових частин, приведений до валу якоря, n(t) – швидкість, MД(t) – рушійний момент, МС (t) – момент сил опору,
результуючий момент М = МД – МC
повністю визначається як першопричина будь-яких змін n(t) або кута α
© НУБіП,Нікіфоров А.П., 2020