

Лабораторна робота 1
.docxЛабораторна робота №1
ВИВЧЕННЯ І ПОВІРКА ПРИЛАДІВ МАГНІТОЕЛЕКТРИЧНОЇ І ЕЛЕКТРОМАГНІТНОЇ СИСТЕМ
МЕТА РОБОТИ
1.1 Вивчити будову, принцип дії і область застосування
приладів магнітоелектричної та електромагнітної систем.
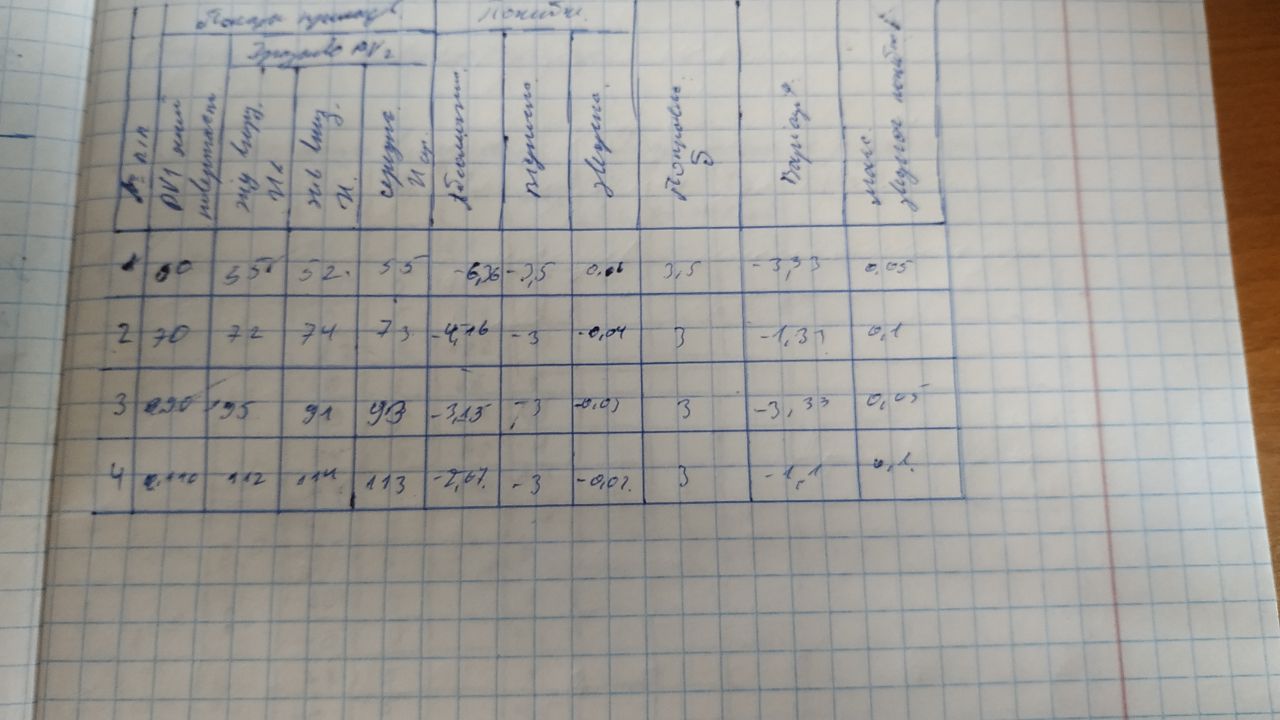
1.2 Виконати повірку амперметра магнітоелектричної та
вольтметра електромагнітної систем. Визначити похибки приладів та
встановити їх клас точності .
Схеми


Таблиці
Т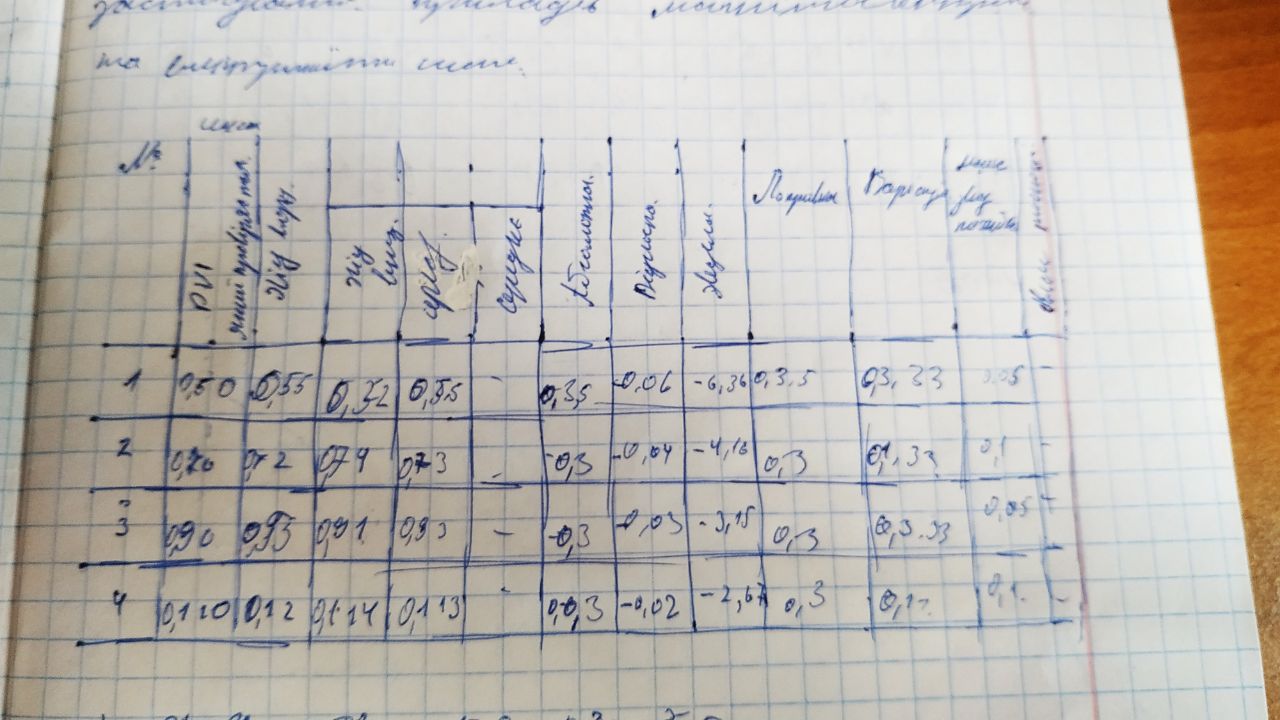 аблиця
1.1
аблиця
1.1
Т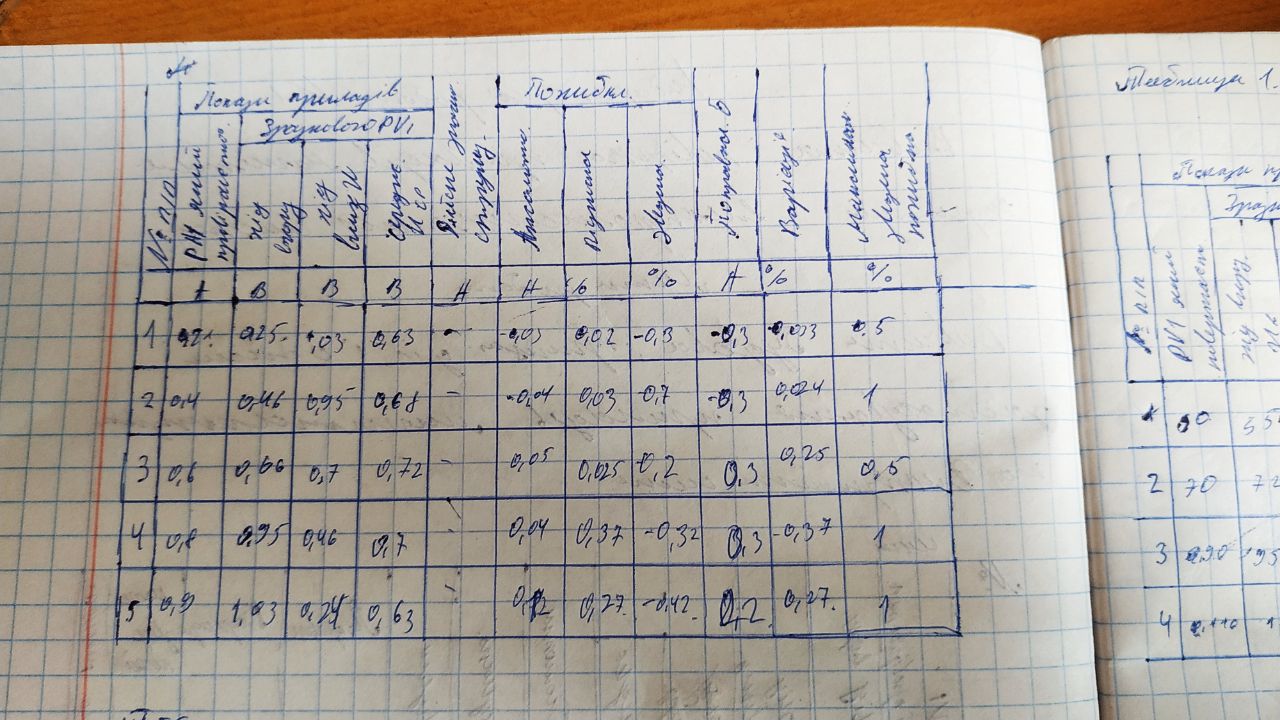 аблиця
1.2
аблиця
1.2
Таблиця 1.3
Висновок: Вивчив будову, принцип дії і область застосування
приладів магнітоелектричної та електромагнітної систем.
Виконав повірку амперметра магнітоелектричної та
вольтметра електромагнітної систем. Визначив похибки приладів та
встановити їх клас точності
Контрольні питання
1. Яка будова та принцип дії вимірювального приладу магнітоелектричної системи?
Прилади магнітоелектричної системи працюють за принципом взаємодії магнітного поля нерухомого постійного магніту з магнітним полем провідника зі струмом, що проходить по рухомій котушці.
2. Яка будова та принцип дії вимірювального приладу електромагнітної системи?
Прилади магнітоелектричної системи працюють за принципом взаємодії магнітного поля нерухомого постійного магніту з магнітним полем провідника зі струмом, що проходить по рухомій котушці.
3. В чому полягає повірка вимірювального приладу? Які вимоги висуваються до повірки приладів?
Повірка засобів вимірювальної техніки — сукупність операцій, що включає перевірку, маркування та/або видачу документа про повірку засобу вимірювальної техніки, які встановлюють і підтверджують, що зазначений засіб відповідає встановленим вимогам.
4. Як визначають абсолютну, відносну та зведену похибки?
Абсолютна похибка вимірювання — це похибка вимірювання, виражена в одиницях вимірюваної величини. Відносна похибка вимірювання — це похибка вимірювання, виражена як відношення абсолютної похибки до результату вимірювання.
5. Як визначають поправку, варіації показів і клас точності приладу?
Для встановлення класу точності приладу необхідно визначити основну похибку на всіх цифрових поділках шкали. За основну похибку приймається найбільша за абсолютною величиною різниця між показом повірюваного і зразкового приладів: . Клас точності приладу визначається за найбільшою основною приведеною похибкою.
6. Які класи точності встановлені державним стандартом для приладів електромеханічної групи?
Характеристики вимірювальних приладів визначені державними стандартами. Основними характеристиками приладів є: діапазон вимірювань, чутливість, поріг чутливості, спожита потужність, похибки. Діапазон вимірювань— область значень вимірюваної величини X, для якої нормовані допустимі похибки. Ця область обмежена межами вимірювань — найбільшими і найменшими значеннями. діапазону вимірювань. Чутливістю S аналогового електровимірювального приладу до вимірюваної величини X називається похідна від переміщення вказівника по вимірюваній величині X. У еликої групи електровимірювальних приладів вказівних має кутове переміщення. Для Цих приладів чутливість визначається як похідна від кута відхилення а вказівника по вимірюваній величині X,
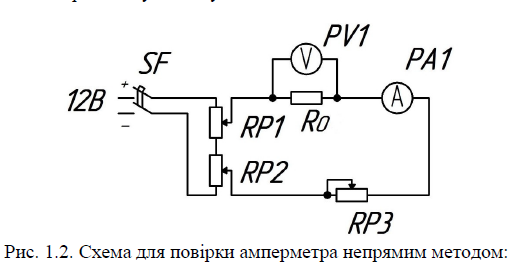
7. Як повіряється прилад непрямим методом?
Непрямий метод вимірювання полягає у тому, що вимірюється не сама величина, значення якої потрібно визначити, а інші величини, притаманні даному об'єкту вимірювання і супутні цьому явищу, які знаходяться у заздалегідь відомій функціональній залежності з величиною, що визначається.
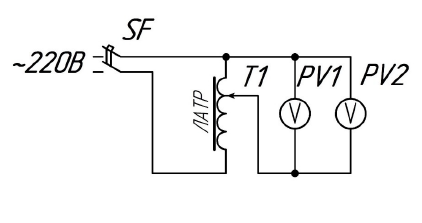
8. Яка відмінність в схемах при повірці приладів магнітоелектричної та електромагнітної систем?
Магнітоелектрична система.
Прилади даної системи працюють за принципом взаємодії магнітного поля нерухомого постійного магніту з магнітним полем провідника зі струмом, що проходить по рухомій котушці.
Електромагнітна система
У вимірювальних механізмах електромагнітної системи обертальний момент обумовлений електромеханічною дією магнітного поля вимірюваного струму в нерухливій котушці приладу на рухливий феромагнітний якір. Механічні сили прагнуть перемістити якір так, щоб енергія магнітного поля механізму стала можливо більшої. В електромагнітному механізмі якір втягується в котушку, включену в ланцюг вимірюваного струму.
9. Які електричні величини і їх значення вимірюються приладами магнітоелектричної та електромагнітної систем?
Магнітоелектрична з рухомою рамкою - обертальний момент створюється між нерухомим постійним магнітом і рухомою рамкою з намотаним на ній проводом, за яким при підключення джерела ЕРС протікає струм. Обертальний момент, створюваний в такому приладі описується законом Ампера. Шкала магнітоелектричного приладу є рівномірною. Аналогом такої системи є двигун постійного струму нормального виконання з порушенням від постійних магнітів.
Магнітоелектрична з рухомим магнітом - обертальний момент створюється між нерухомою рамкою з струмом і рухомим постійним магнітом. Ця система є аналогом магнітоелектричної з рухомою рамкою, має низький клас точності - 4,0 і нижче, менш поширена і застосовується для вказівних приладів транспортних засобів, завдяки своїй стійкості до зовнішніх механічних впливів. Аналогом цієї системи є двигун постійного струму зверненого виконання з порушенням від постійних магнітів.
Важливо: магнітоелектричні прилади за своїм принципом дії вимірюють середню величину струму, а напрямок відхилення стрілки залежить від напрямку струму в рамці: тому вони можуть застосовуватися тільки для вимірювання знакосталих струмів, і вимагають дотримання полярності підключення [1] . Магнітоелектричні прилади непридатні для безпосереднього вимірювання змінного струму (стрілка буде тремтіти поблизу нульового значення).
Електромагнітна - обертальний момент створюється між нерухомою котушкою зі струмом і рухомим феромагнітним сердечником.
Теоретична основа даного приладу - це закон взаємодії струму і феромагнітної маси. Особливістю електромагнітної системи є квадратична залежність крутного моменту від струму в котушці, звідки слід можливість застосування таких систем для вимірювання як постійних так і змінних струмів, а також нерівномірна шкала. Аналогом такої системи є реактивний двигун, що працює відповідно до закону збереження імпульсу .
Електродинамічна - обертальний момент створюється між двома котушками зі струмом: рухомою і нерухомою. Обертальний момент пропорційний добутку струмів в котушках. Електродинамічне зусилля засновано на взаємодії обох струмів з полями (закон Ампера). Аналогів такої системи в двигунах не існує, в зв'язку з малими обертаючими моментами.
Феродинамічні система подібна електродинамічної, але для збільшення обертального моменту в конструкції передбачається сердечник з феромагнітного матеріалу. Аналогом такої системи є двигун постійного струму нормального виконання.
Електродинамічні та феродинамічні системи застосовують в вольтметрах і амперметрах, але найчастіше в - ватметрах і варметрах.
Індукційна - крутний момент створюється між полем нерухомих котушок, що рухається (для створення такого поля в котушках струми повинні бути зрушені по фазі) і струмами, що наводяться в обертовому неферомагнітними диску (зазвичай алюмінієвому). В індукційній системі індіцірованіе може здійснюватися кількістю оборотів диска, яке відображається через рахунковий механізм. Гальмівний момент в цьому випадку створюється взаємодією магнітного поля постійного магніту і струмів, що наводяться в диску. Іноді індіцірованіе індукційної системі може здійснюватися за допомогою стрілки - в такому випадку гальмівний момент створюється пружиною. Момент, що обертає в індукційної системі дорівнює добутку потоків котушок і залежить від кута зсуву між їх фазами. Аналогом цієї системи є асинхронний двигун з короткозамкненим ротором.
Індукційну систему найчастіше застосовують для лічильників електричної енергії.
Виконав: Крупенко Андрій група ЕЕЕ-20002Б