

1.9 Зависимости первых и вторых производных от функций положения для входного звена для второго механизма.
Берём первую производную для первой системы уравнений. Рисунок 1.30

Рисунок 1. 30
Для нахождения углов ф3` и ф2`, воспользуемся системой Крамера. Рисунок 1.31
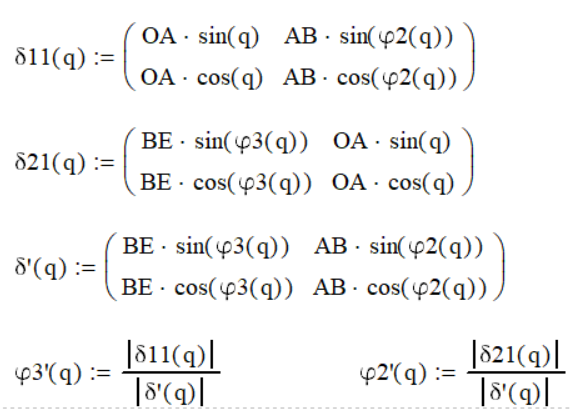
Рисунок 1. 31
Для нахождения угла ф4`, возьмём первую производную по уравнению, которое получали выше, для нахождения угла ф4. Рисунок 1.32

Рисунок 1. 32
Записываем первую производную по выходной координате. Рисунок 1.33
![]()
Рисунок 1. 33
Найдём вторые производные. Для этого берём вторую производную для первой системы уравнений и используем метод Крамера. Рисунок 1.34
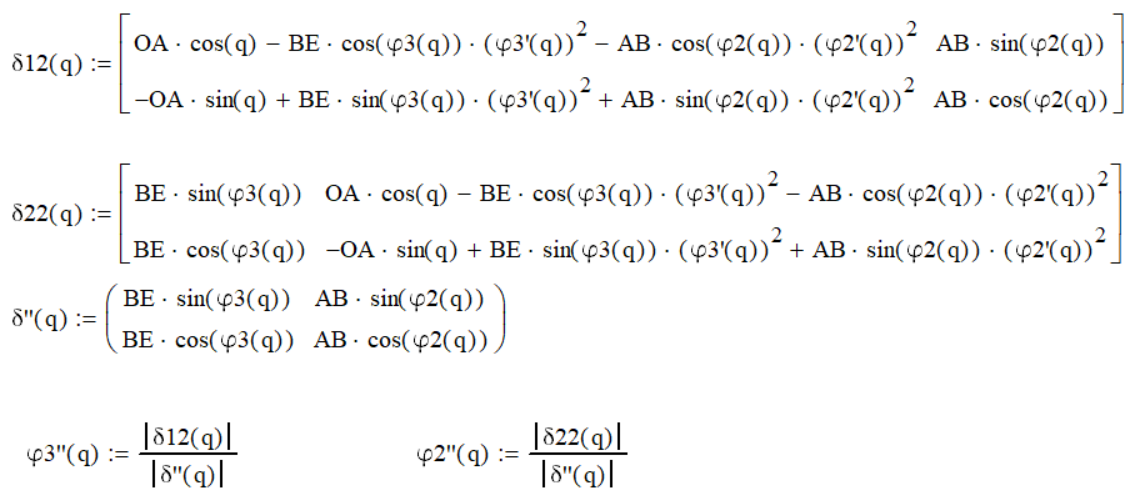
Рисунок 1. 34
Для нахождения угла ф4``, возьмём вторую производную по уравнению, которое получали выше, для нахождения угла ф4`. Рисунок 1.35
![]()
Рисунок 1. 35
Записываем вторую производную по выходной координате. Рисунок 1.37
![]()
Рисунок 1. 36
1.10 Сравнение полученных данных для второго механизма
На основании всех имеющихся данных, можем построить графики. Для проверки вычисленных производных, воспользуемся встроенной функцией производной. Таким образом получаем 16 графиков: первая строка – графики по выходных координатам и углам, вторая строка – первая производная, третья трока – вторая производная. Рисунок 1.37
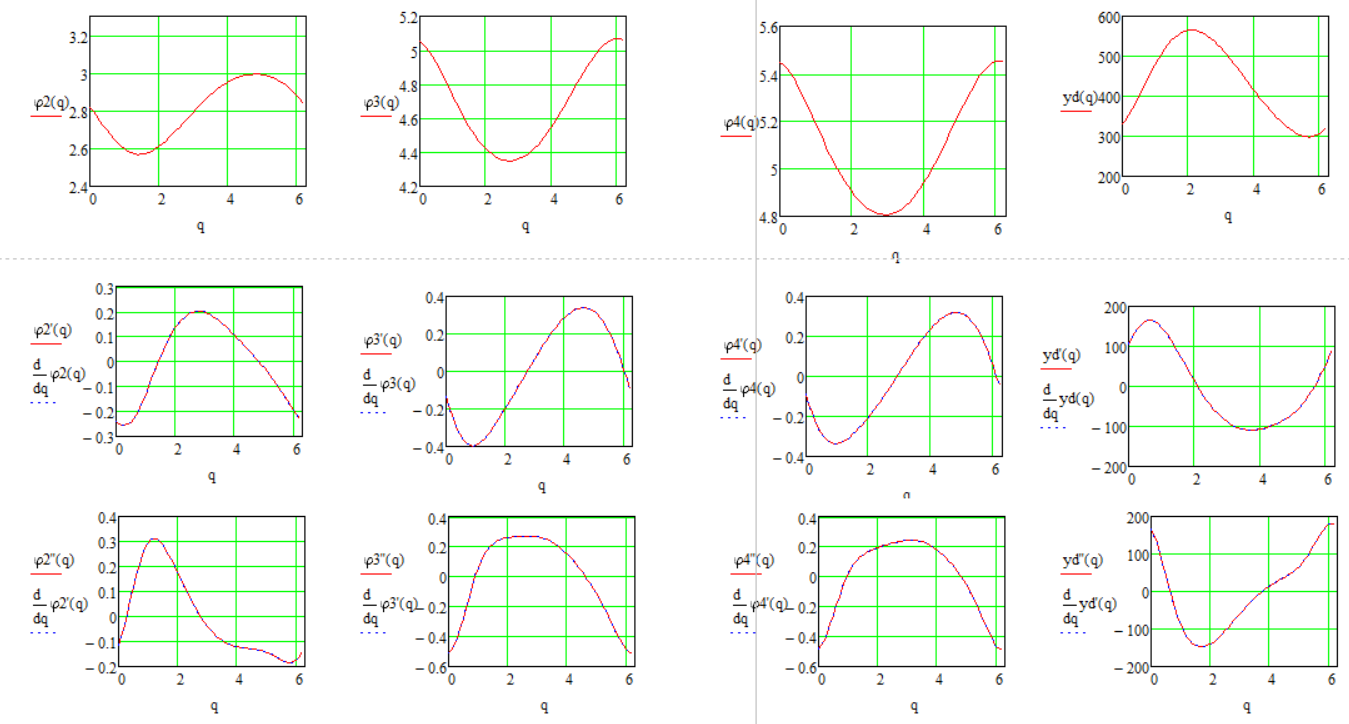
Рисунок 1. 37
Как видно из графиков производных, линии совпадаю, значит наши выражения, которые мы выводили выше, верны.
Для большей достоверности, сравним положения координат звеньев механизма аналитическим и графическим методами. Механизм будет находиться в расчётном положении при q=π/6. Все данные приведём в виде таблицы.
Таблица 1. 2 Сравнение аналитического и графического метода.
Метод |
ф2 |
ф3 |
ф4 |
yd |
Аналитический |
154,064° |
281,78° |
306,134° |
402,928 |
Графический |
154,064° |
281,78° |
306,134° |
402,93 |
Все данные и выражения найдены правильно.
1.11 Критерии качества кинематической схемы для первого механизма.
Для определения критериев качества кинематической схемы нам необходимо знать экстремумы нашего механизма по выходной координате, в данном случае это yc`. Для этого воспользуемся оператором Given/Find: задаём начальные приближения и выводим координаты. В нашем случае – это два экстремума (q1 и q2). График выходной координаты и программа предоставлены на рисунке 1.38.
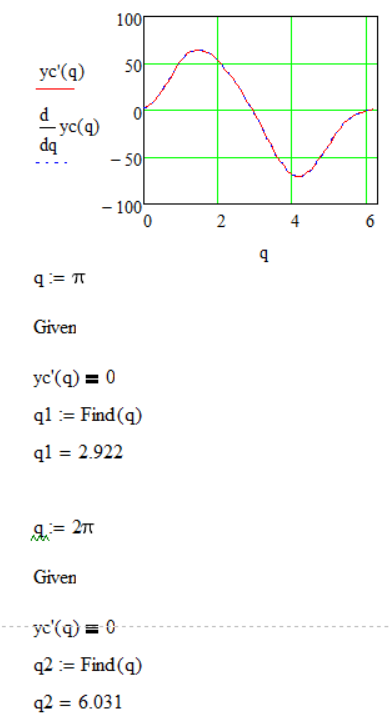
Рисунок 1. 38
Ход выходного звена (н).
Ход выходного звена представляет разность выходных координат по точкам экстремум, которые мы нашли выше. Рисунок 1.39
![]()
Рисунок 1. 39
Коэффициент изменения средней скорости выходного звена (коэффициент производительности) (Kv).
Коэффициент производительности находится из соотношения угла рабочего хода/ угол холостого хода. При этом, угол рабочего хода равен разности экстремумов, и он не должен быть отрицательным. Рисунок 1.40.
![]()
Рисунок 1. 40
Угол холостого хода находится из разности всей окружности и угла рабочего хода. Таким образом, можем найти коэффициент производительности. Рисунок 1.41
Рисунок 1. 41
На основании двух критериев (H – ход выходного звена и Kv – коэффициент производительности) нужно подобрать длины. Наши критерии должны соответствовать заданным критериям в задании.
В данном случае, полученные значения критериев не соответствуют заданным, поэтому подбираем длины. В итоге получаем длины в метрах. Рисунок 1.42
![]()
Рисунок 1. 42
Значения критериев, советующие подобранным длинам. Рисунок 1.43
Рисунок 1. 43