

Динамическая ошибка по углу
Общее уравнение выглядит следующим образом (Рис. 7. 32):
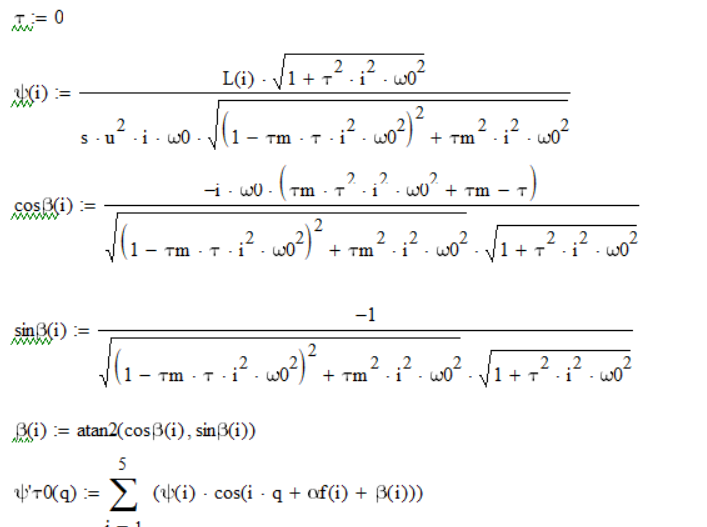
Рисунок 7. 32
Построим график сравнения динамической ошибки по углу при постоянной времени двигателя равной нулю (τ=0) и обычной постоянной времени машины (рассматривали выше). График представлен на рисунке 7. 33:
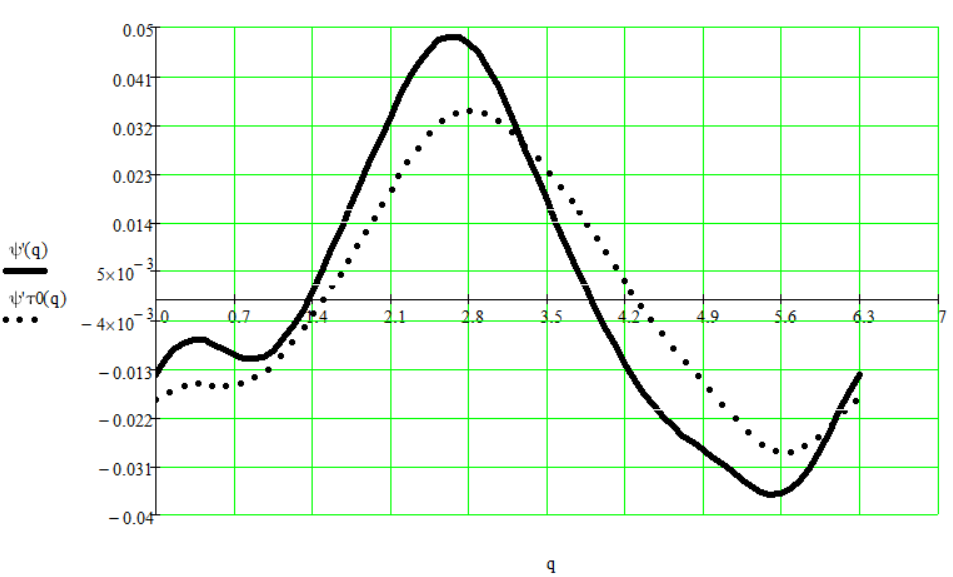
Рисунок 7. 33
Динамическая ошибка по скорости
Запишем общее уравнение:

Построим график сравнения динамической ошибки по скорости при постоянной времени двигателя равной нулю (τ=0) и обычной постоянной времени машины (рассматривали выше). График представлен на рисунке 7. 34:
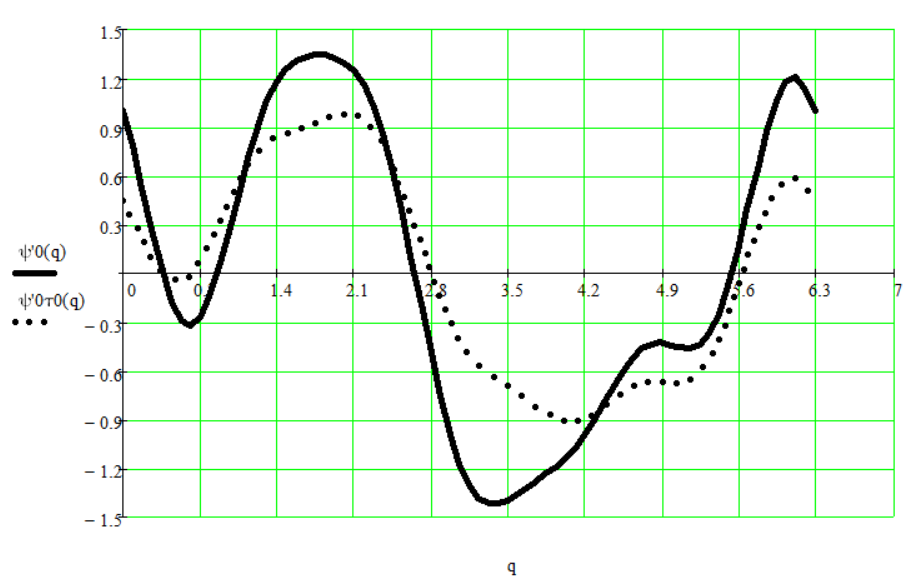
Рисунок 7. 34
Теперь мы можем вычислить максимальное значение отклонение закона движения входного звена от программного (равномерного) движения (ψmax и ψmin), определиться с коэффициентом неравномерности вращения входного звена и сравнить его с допускаемым (указан в задании – Ϭ=0,05). Рис. 7. 35:
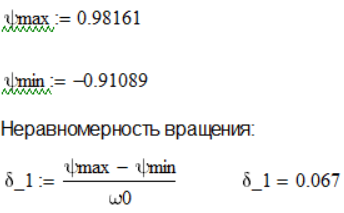
Рисунок 7. 35
Вывод: получаем коэффициент неравномерности вращения входного звена больше, чем допускаемый (Ϭ=0,05). Мы можем исправить это, введя кулачковый разгружатель, который уменьшит возмущающий момент, тем самым понизив коэффициент неравномерности вращения входного звена.
7. 8 Переменная часть движущего момента при τ=0

Рисунок 7. 36
Тогда закон изменения движущего момента при учете механической характеристике двигателя с точностью до пяти гармоник определяется по формуле
.
Для нашего механизма: (Рис. 7. 37):
Рисунок 7. 37
Построим график на основании закона изменения движущего момента при учёте механической характеристики при τ=0, и двух прошлых характеристик (при τm). Рис. 7. 38:
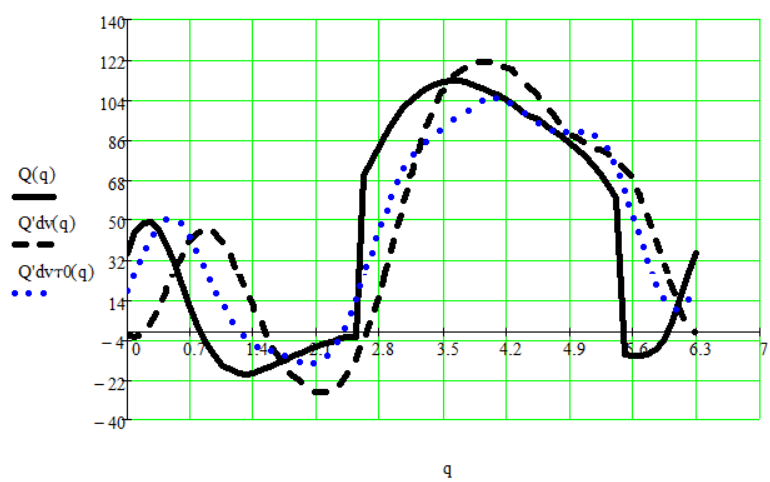
Рисунок 7. 38
7. 9 Нахождение крутящего момента на валу кривошипа τ=0
Для нашего механизма получим (Рис. 7. 39):
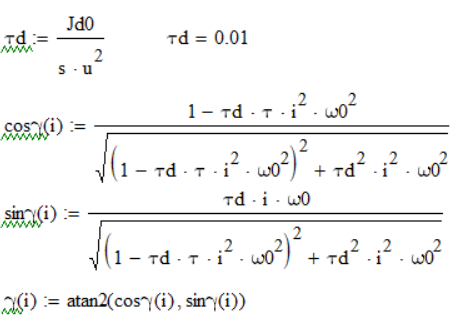
Рисунок 7. 39
Таким образом, запишем крутящий момент в приводе с точностью до пяти гармоник. Рис. 7. 40:
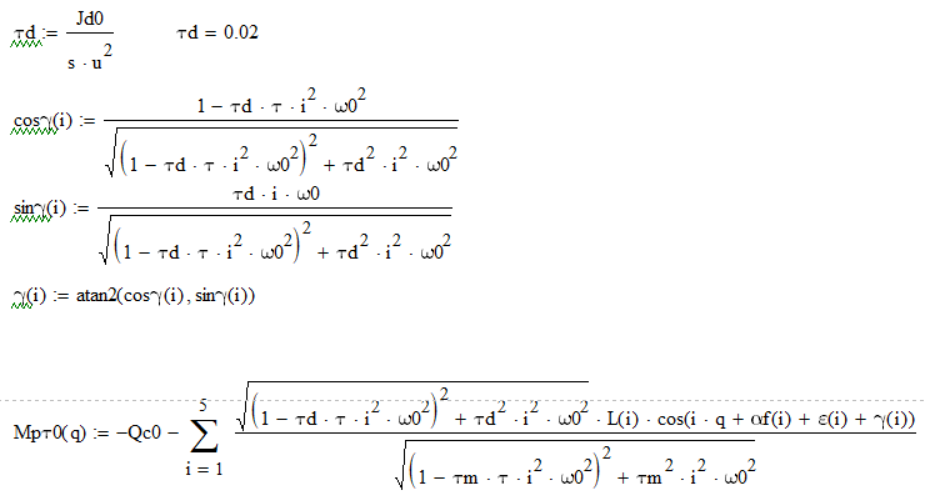
Рисунок 7. 40
Построим график крутящего момента в приводе при τ=0 и крутящий момент при τ=τm (Рис. 7. 41):
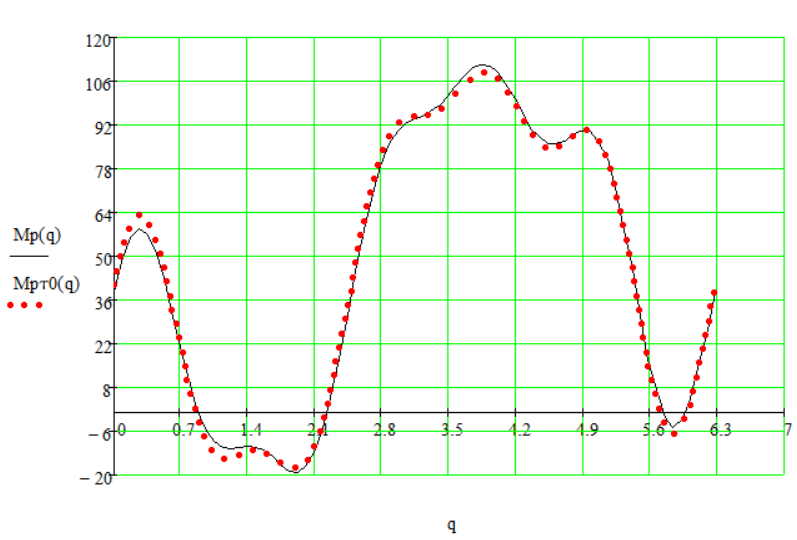
Рисунок 7. 41
На основании графика, представленного на рисунке 7. 41, мы можем провести проверку.
Основное требование конструирования: знакопостоянство крутящего момента, обеспечивающее, отсутствие перекладки зазоров в зубчатых передачах редуктора. Нарушение условия ведет к быстрому износу передач.
Как видно из нашего графика, у нас происходит нарушение знакопостоянства крутящего момента. Проверка не пройдена. Произойдёт быстрый износ. Мы должны исправить эту ситуацию.
7. 10 Улучшение показателей качества машины
В машине, рассматриваемой в курсовом проекте, произошла перекладка зазоров. Существует несколько способов обеспечения знакопостоянства крутящего момента:
а) увеличение среднего значения приведенного момента инерции, что обеспечивается установкой маховика;
б) увеличение среднего значения приведенного момента сил сопротивления, что достигается установкой тормозного устройства;
в) установка динамического гасителя или разгружателя.
г) … и т.д.
Определение параметров маховика
Осевой момент инерции маховика
 ,
,
где масса маховика
 ;
плотность стали
;
плотность стали
 ;
;
объем
 .
.
Если принять
 ,
то
,
то
 ,
,
отсюда радиус маховика
 ,
,
диаметр маховика

Масса маховика
 .
.
Для нашего механизма начнём с прибавления к среднему значению приведённого момента инерции (J=2 кг/м2). Тогда получаем следующий график (Рис. 7. 42):
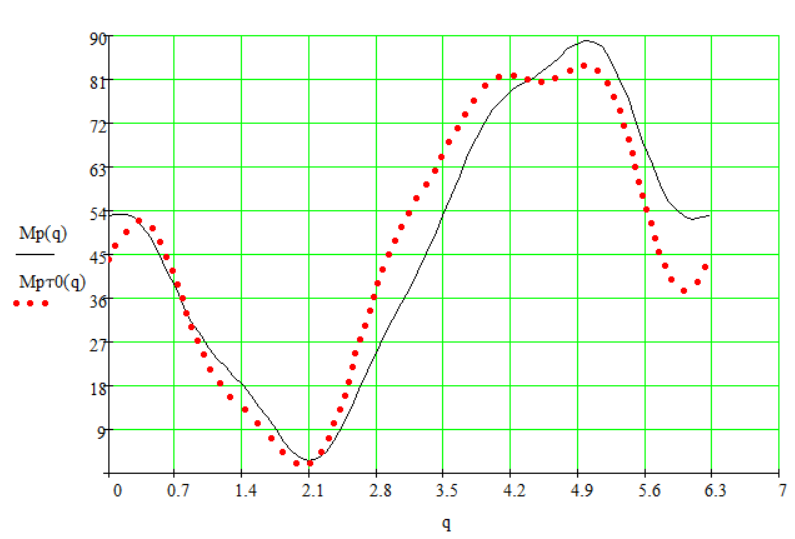
Рисунок 7. 42
Как видно из графика, наши кривые понялись, перемена знака отсутствует, значит J достаточно, условие знакопостоянства соблюдается. Перекладка зазоров отсутствует.
Проведём расчёт массы маховика. Рис. 7. 43.

Рисунок 7. 43
Масса увеличилась в 68,762 кг, при радиусе r=0.241 м, при массе механизма без противовесов равной 33 кг. Данный способ не целесообразен.