

7.4 Определение динамических ошибок
Динамическая ошибка по углу
Общее уравнение выглядит следующим образом:
 где
где



В нашем случае это будет выглядеть так (Рис. 7. 21):
Рисунок 7. 21
График динамической ошибки по углу представлен на фотографии 7. 22:
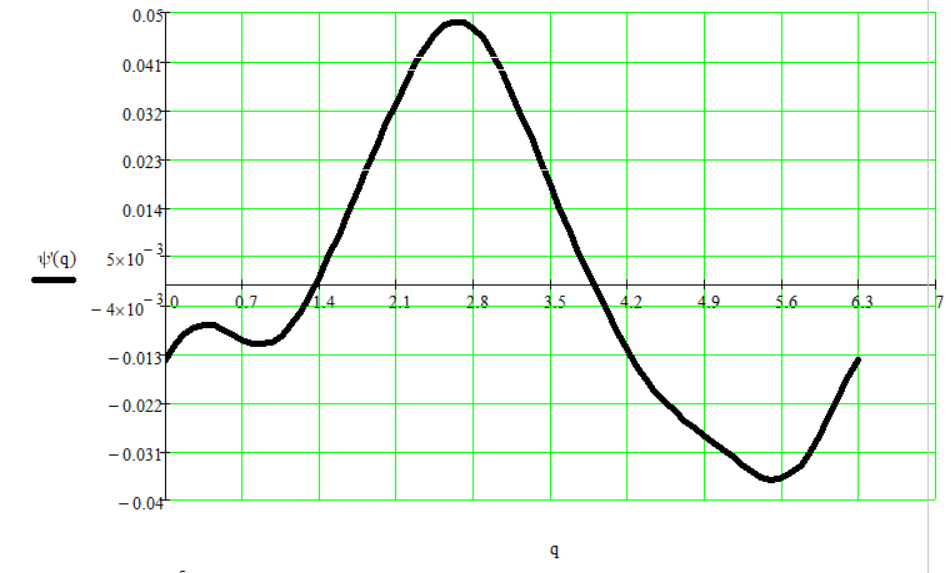
Рисунок 7. 22
Динамическая ошибка по скорости
Общее уравнение выглядит следующим образом:

Запишем уравнение для нашего механизма (Рис. 7. 23):

Рисунок 7. 23
График, соответствующий динамической ошибке по скорости (Рис. 7. 24):
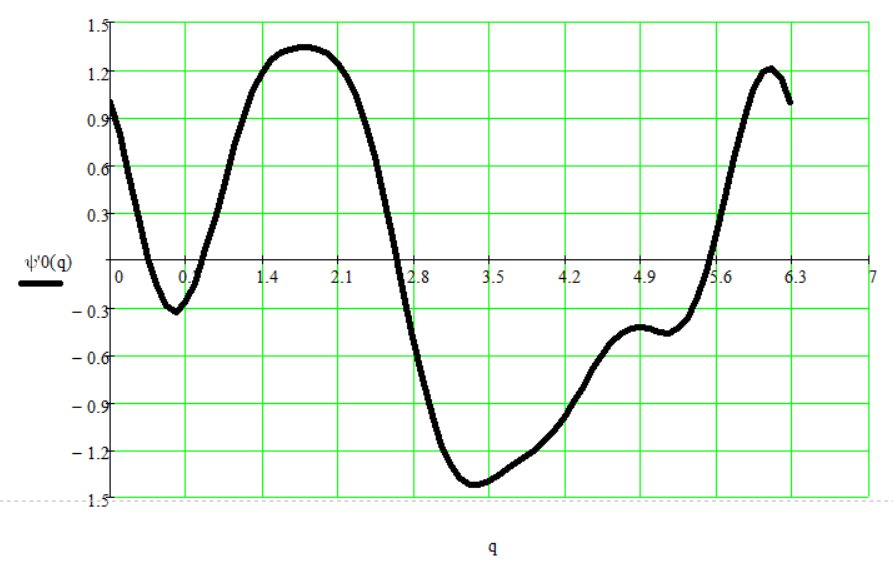
Рисунок 7. 24
Теперь мы можем вычислить максимальное значение отклонение закона движения входного звена от программного (равномерного) движения (ψmax и ψmin), определиться с коэффициентом неравномерности вращения входного звена и сравнить его с допускаемым (указан в задании – Ϭ=0,05). Рис. 7. 25:
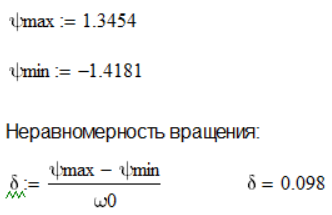
Рисунок 7. 25
Вывод: получаем коэффициент неравномерности вращения входного звена больше, чем допускаемый (Ϭ=0,05). Мы можем исправить это, введя кулачковый разгружатель, который уменьшит возмущающий момент, что приведёт к понижению коэффициента неравномерности вращения входного звена.
7. 5 Переменная часть движущего момента
Переменная часть движущего момента с точностью до пяти гармоник:

где


Теперь проанализируем наш механизм. Рис. 7. 26:
Рисунок 7. 26
Тогда закон изменения движущего момента при учете механической характеристике двигателя с точностью до пяти гармоник определяется по формуле
 .
.
Для нашего механизма: (Рис. 7. 27):
Рисунок 7. 27
Построим график на основании закона изменения движущего момента при учёте механической характеристики. Рис. 7. 28:
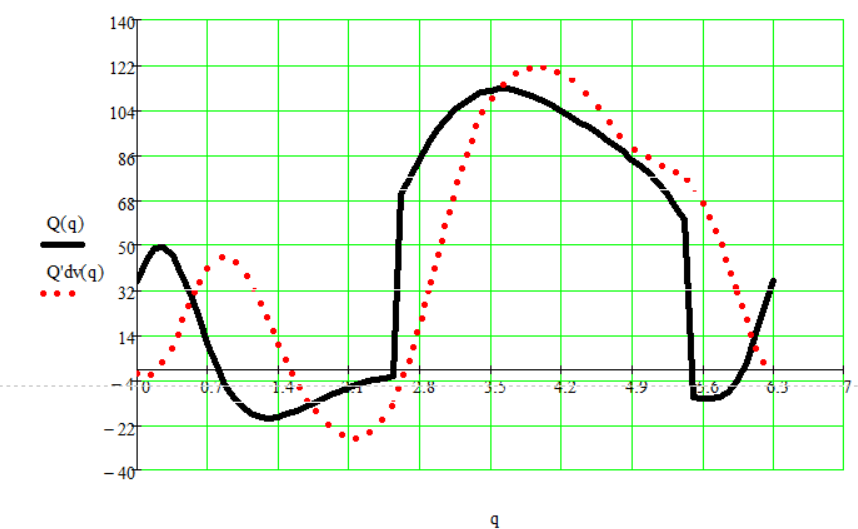
Рисунок 7. 28
7. 6 Кутящий момент в передаточном механизме
Важной динамической характеристикой установившегося движения являются динамические нагрузки в передаточном механизме. Их можно определить из уравнения вращательного движения ротора двигателя

где
 -
момент инерции ротора двигателя и
передаточного механизма, приведенный
к входному звену. Тогда
-
момент инерции ротора двигателя и
передаточного механизма, приведенный
к входному звену. Тогда

Поскольку
 ,
,
то

=
где
 -
механическая постоянная привода.
-
механическая постоянная привода.
Крутящий момент в приводе с точностью до пяти гармоник


где
Для нашего механизма получим (Рис. 7. 29):
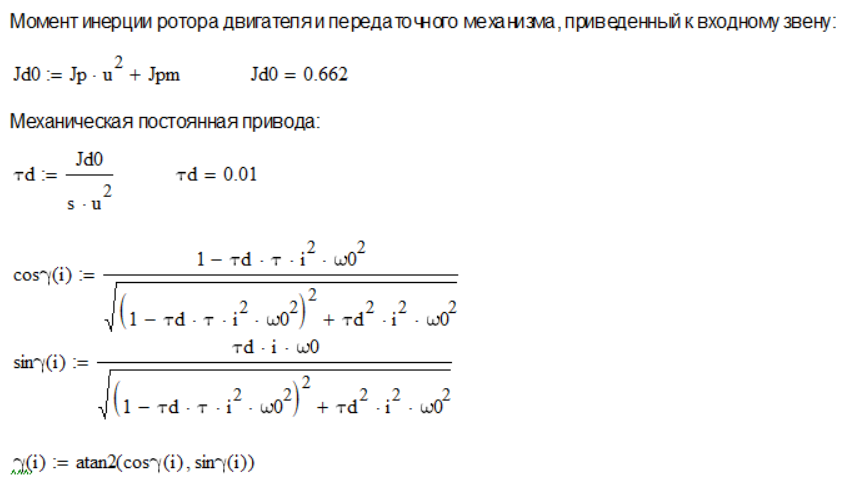
Рисунок 7. 29
Таким образом, запишем крутящий момент в приводе с точностью до пяти гармоник. Рис. 7. 30:

Рисунок 7. 30
Построим график крутящего момента в приводе (Рис. 7. 31):
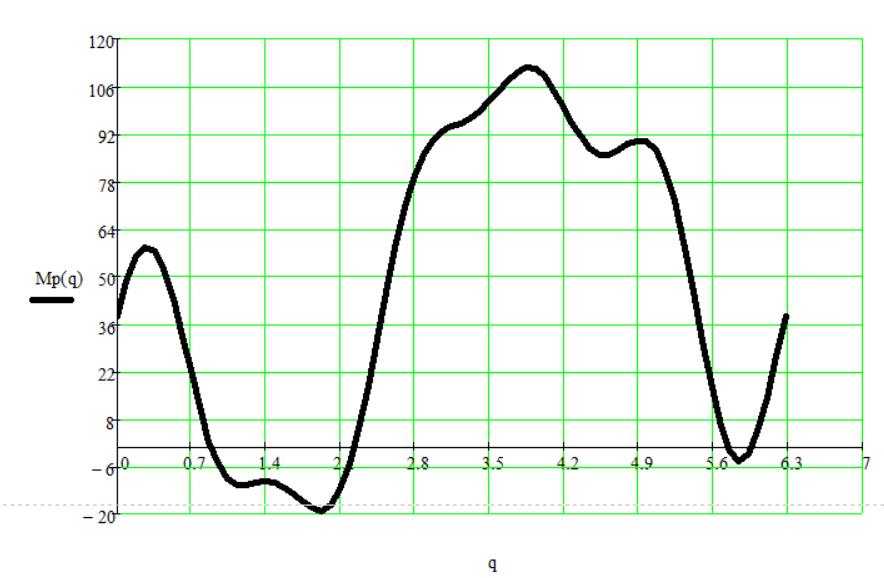
Рисунок 7. 31
На основании графика, представленного на рисунке 7. 31, мы можем провести проверку.
Основное требование
конструирования: знакопостоянство
крутящего момента,
обеспечивающее, отсутствие перекладки
зазоров в зубчатых передачах редуктора.
Нарушение условия
 ведет к быстрому износу передач.
ведет к быстрому износу передач.
Как видно из нашего графика, у нас происходит нарушение знакопостоянства крутящего момента. Проверка не пройдена. Произойдёт быстрый износ.
7. 7 Определение динамических ошибок при τ=0
τ=0 приводит к статическим характеристикам. Из-за чего у нас зануляются некоторый слагаемые.