

12.4 Определение динамических нагрузок ма
Важной динамической характеристикой установившегося движения являются динамические нагрузки в передаточном механизме. Их можно определить из уравнения вращательного движения ротора двигателя:
![]()
Момент инерции ротора двигателя и передаточного механизма, приведенный к входному звену:
![]()
Найдем механическую постоянную привода:
![]()
Найдем крутящий момент в приводе с точностью до пяти гармоник:
![]()

где
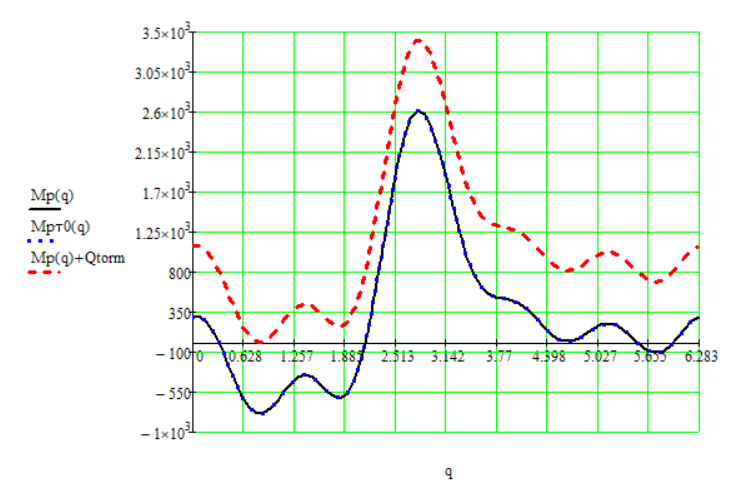
Рис. 12.10. График момента в приводе после установки тормоза, до установки тормоза при τ ≠0, τ=0
Основное требование конструирования:
знакопостоянство крутящего момента, обеспечивающее, отсутствие перекладки зазоров в зубчатых передачах редуктора.
![]()
Нарушение условия ведет к быстрому износу передач.
Крутящий момент, полученный в результате расчетов, не удовлетворяет требованию знакопостоянства, следовательно, требуется улучшение динамических характеристик.
Расчет КПД тормоза:
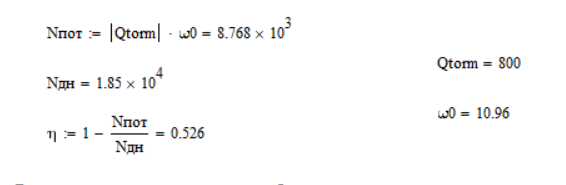
Ввиду того, что КПД машины после установки тормоза составляет 53%,можно заключить, что установка тормоза рациональна и приведет к улучшению эксплуатационных свойств механизма.
13. Вывод курсового проекта
В данном курсовом проекте был разработан пресс-автомат. Был произведен структурный, геометрический и кинематический, силовой анализ.
По результатам силового анализа был выбран двигатель.
Оценивалась внешняя виброактивность исполнительного механизма. Главный вектор сил инерции механизма был разложен в ряд Фурье на 5 гармоник.
Наиболее значимую первую гармонику было решено уравновесить с помощью установки двух противовесов.
В заключительной части проекта было выполнено динамическое исследование поведения машины в установившемся режиме. Неравномерность вращения не превысила допустимое значение. Была выявлена перекладка зазоров в передаточном механизме (из-за непостоянства знака вращающего момента в передаточном механизме).
Установка тормоза сделала момент в приводе знакопостоянным.
14. Список литературы
1. Теория машин и механизмов (учебник)/ А. Н. Евграфов, М. З. Коловский, Г. Н. Петров/ Санкт-Петербург, Издательство Политехнического университета 2015 год. 2. Теория механизмов и машин. Кинематический и точностной анализ механизмов. Учеб. пособие./ Ю.А.Семенов, Н.С. Семенова. -СПб.: СПбГТУ, 1996. - 92 с. 3. Расчет и проектирование механизмов и машин с помощью ЭВМ. Учеб пособие./ А.Н. Евграфов. - СПб.: СПбГТУ, 1992. - 80 с. 4. Структурный и геометрический анализ механизмов. Метод указания к практическим занятиям/Сост. Ю.А.Семенов, Н.С.Семенова.-СПб.: СПбГТУ, 1994. - 44 с.