6. Таблица сравнения. Выбор лучшего прототипа.
|
Kv |
H, м |
K1 |
K2 |
Габариты, мм |
Выбор лучшей схемы |
Задание |
1.1 |
0.28 |
|
|
|
|
Схема 1 |
1.1 |
0.28 |
1,383 |
1,063 |
2200х700 |
Выбрана |
Схема 2 |
1.1 |
0.28 |
0,512 |
1,047 |
2870х2100 |
- |
Из таблицы видно, что наиболее подходящим по данным критериям является 1 прототип, так как он обладает лучшими коэффициентами К1,К2. Следовательно, выбираю прототип №1 для дальнейших расчетов.
7. Кинематический анализ выбранного прототипа №1.
7.1.Введение.
Задачей кинематического анализа является определение скоростей и ускорений точек механизма, угловых скоростей и угловых ускорений его звеньев при заданных первых и вторых производных по времени от обобщенных координат.
7.2 Нахождение скоростей и ускорений звеньев механизма
А налог
скорости – первая производная по
обобщающей координате q.
налог
скорости – первая производная по
обобщающей координате q.
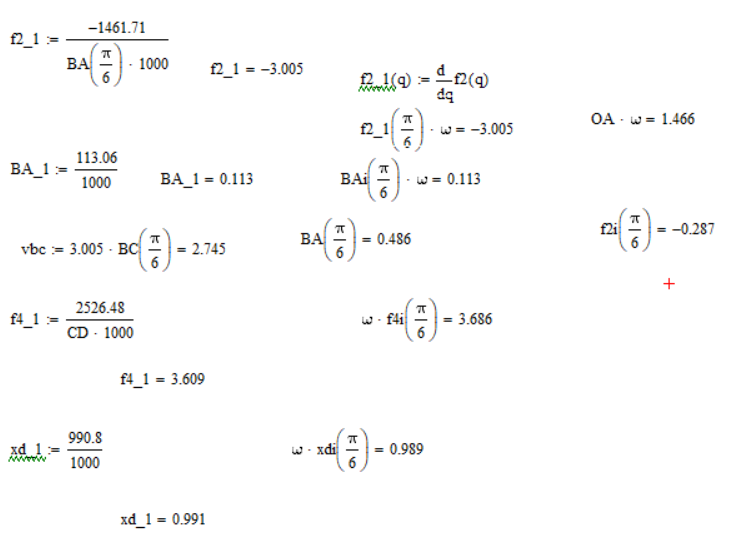
Определим аналоги скорости и ускорения для первой системы:

Аналог ускорения – вторая производная по обобщенной координате q:

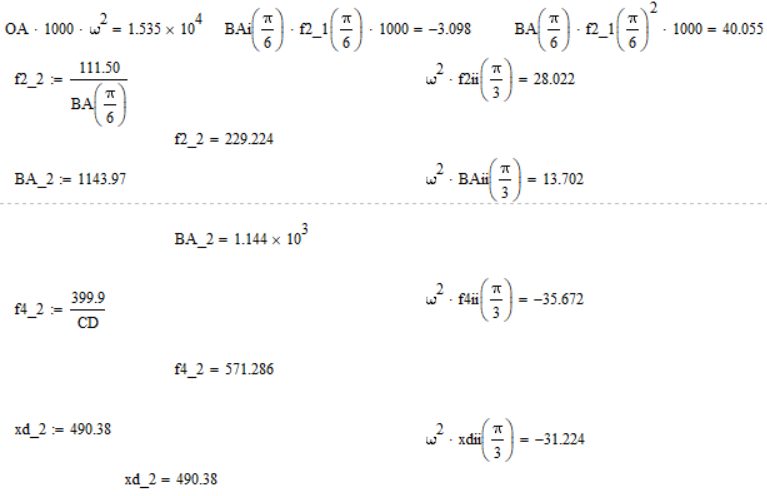
Для второй системы:

Определяем аналоги скоростей:


Определяем аналоги ускорений:

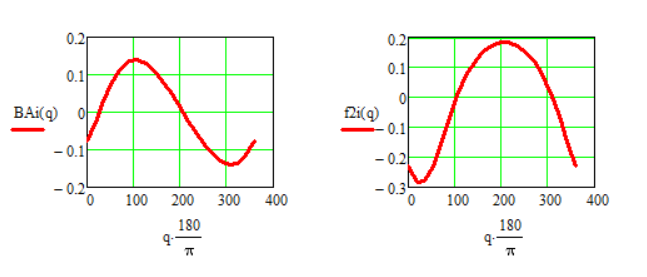
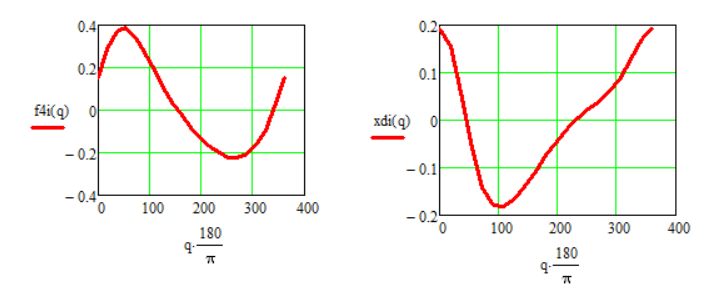
Рис.7.1.Аналоги скоростей звеньев прототипа 1

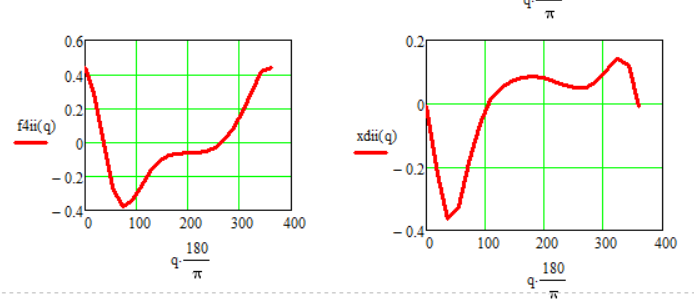
Рис. 7.2. Аналоги ускорений звеньев прототипа 1
8.Графоаналитическое исследование кинематики выбранного прототипа.
8.1.Построение плана скоростей и ускорений положение 30°.
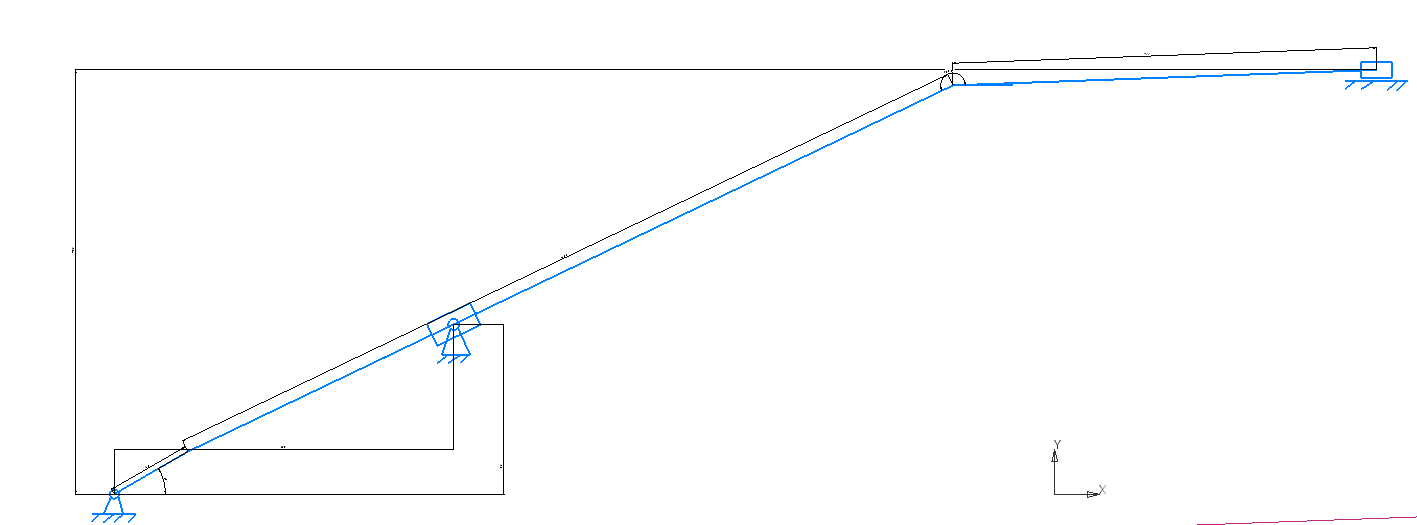
Рис.8.1.Схема механизма положение 30°
План скоростей
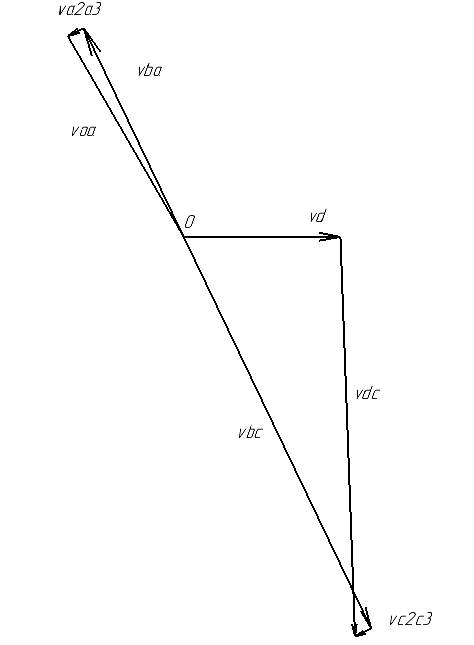
Рис.8.2.План скоростей
План ускорений
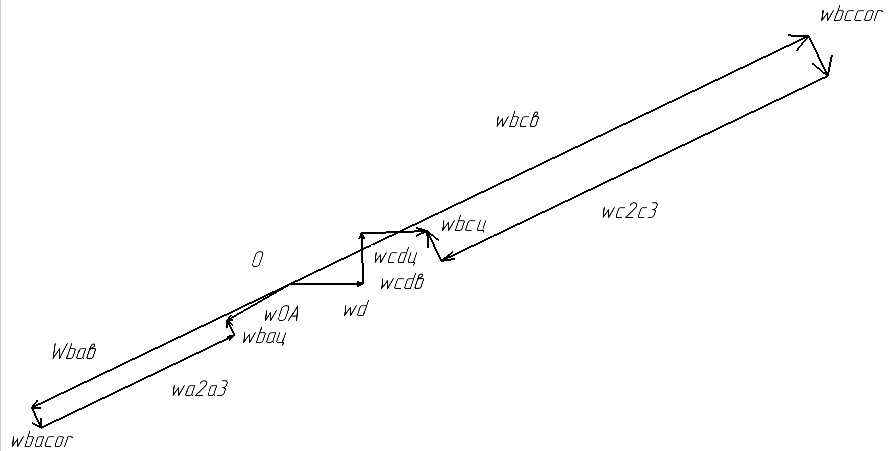
Рис. 8.3.План ускорений
План скоростей положения 30 ͦ аналитически и в сравнении с графическими значениями:
План ускорений:
8.2.Сравнение результатов расчетов.
Скорости |
Аналитически |
Графически |
ω2 |
-3,005 1/c |
-3,005 1/c |
Vba |
0,113 м/c |
0,113 м/c |
ω4 |
3,609 1/c |
3,609 1/c |
Vxd |
0,991 м/c |
0,989 м/c |
Ускорения |
Аналитически |
Графически |
ε2 |
28,022 c-2 |
28,022 c-2 |
Wba |
13.702 м/c2 |
13.702 м/c2 |
ε4 |
-35,672 c-2 |
-35,672 c-2 |
Wxd |
-31,224 м/c2 |
-31,224 м/c2 |
9. Силовой анализ механизма
9.1. Введение.
В силовом расчете рассчитываем силы тяжести, инерции, моменты сил инерции, задаем рабочую нагрузку. Движущий момент необходимо найти двумя способами: из уравнений кинетостатики, общего уравнения динамики. Также из уравнений кинетостатики определяем неизвестные реакции.
9.2. Определение исходных данных для силового расчета.
![]()
![]()
![]()
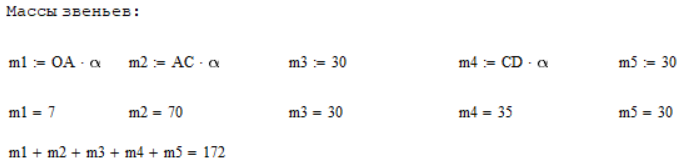
Массы звеньев (кг):
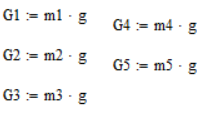
Силы тяжести (Н):
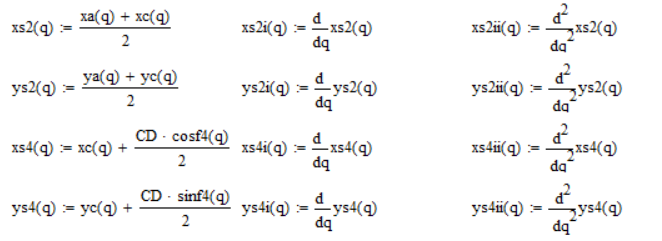
Координаты центров масс, их аналоги скорости и ускорения:
Силы инерции и силы тяжести приложены в точках центра масс звеньев. Для ползунов центр – масс расположен в середине ползуна, а для стержней – на середине длины стержня.
Центр масс звена 4 и 2:
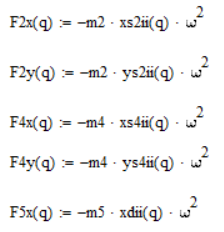
Определение сил инерции (H):
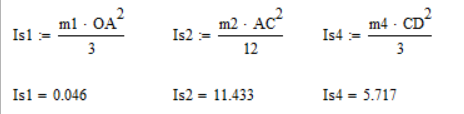
Определение
моментов инерции (![]() ):
):
Определение
моментов сил инерции (![]() ):
):