

Отчет_УП_1
.docx

Инженерная школа информационных технологий и робототехники
15.03.04 Автоматизация технологических процессов и производств
Отделение автоматизации и робототехники
Отчёт по лабораторной работе №1
По дисциплине: Учебный проект
Вариант №3
Выполнил: студент гр. 8Т41 _______ ______ Кирильцева К. М.
Подпись Дата Фамилия И.О.
Проверил: ассистент ОАР _______ ______ Кучман А. В.
Подпись Дата Фамилия И.О.
Томск 2025
Цель работы: освоить принципы работы управления двигателем постоянного тока с помощью реверсивного реле и кнопки.
Задание на лабораторную работу: по приему 1 через последовательный порт осуществить пуск двигателя, по приему 0 его останов, если 0 не приходит 10 секунд, двигатель останавливается автоматически. Использовать нереверсивное реле.
Используемое оборудование:
Плата Arduino Uno
Дисплей LCD1602 с I2C модулем
Датчик температуры и влажности DHT11
Кнопка
Резистор 4.7 кОм
Макетная плата
Соединительные провода
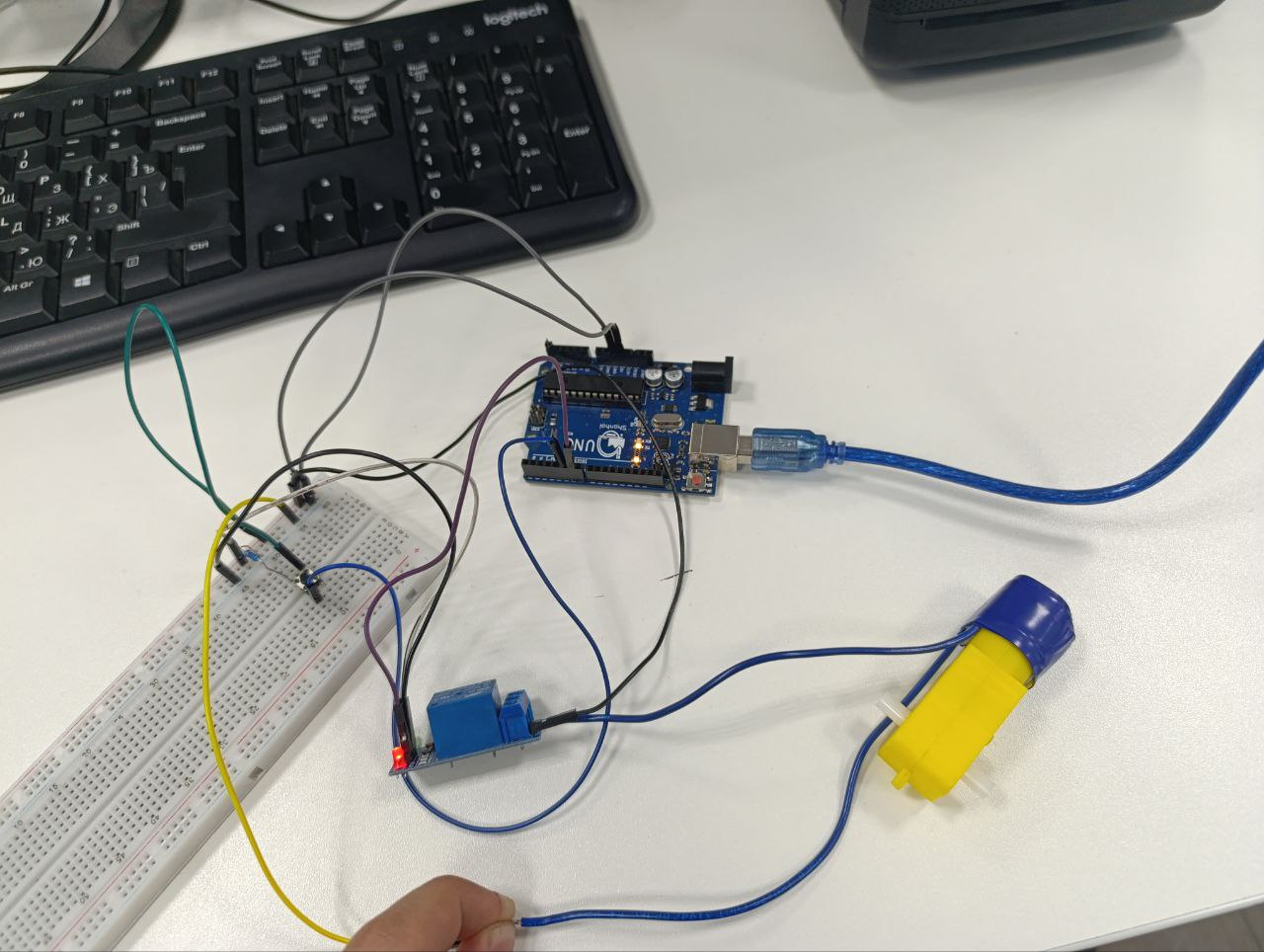
Для выполнения работы необходимо было собрать схему, состоящую из перечисленного выше оборудования. Собранная схема представлена на рисунке 1, код программы представлен на листинге 1.
Рисунок 1 – Схема проектно-аппаратной части, собранная в ходе выполнения индивидуального задания по варианту.
Листинг 1 – Код для управления мотором-редуктором.
|
Вывод: в ходе выполнения данной лабораторной работы были изучены теоретические основы, касающиеся принципов работы силовых устройств коммутации и двигателей постоянного тока. Была собрана схема для индивидуального задания и написан код для её реализации.