

Лаба 3 / СУЭП_Лабораторная работа №3_Токарев_0421
.docxМИНОБРНАУКИ РОССИИ
Санкт-Петербургский государственный
электротехнический университет
«ЛЭТИ» им. В.И. Ульянова (Ленина)
Кафедра РАПС
отчет
по лабораторной работе №3
по дисциплине «Системы управления электроприводом»
ТЕМА: «Исследование замкнутых систем управления двигателем постоянного тока»
Студент гр. 0421 |
|
Токарев А.А. |
Преподаватель |
|
Константинов К.В. |
Санкт-Петербург
2024
Цель работы: Ознакомиться с работой одно- и двухконтурной систем управления двигателем постоянного тока с П- и ПИ-регуляторами. Снять статические и динамические характеристики этих систем.
Схема установки представлена на рисунке 1.
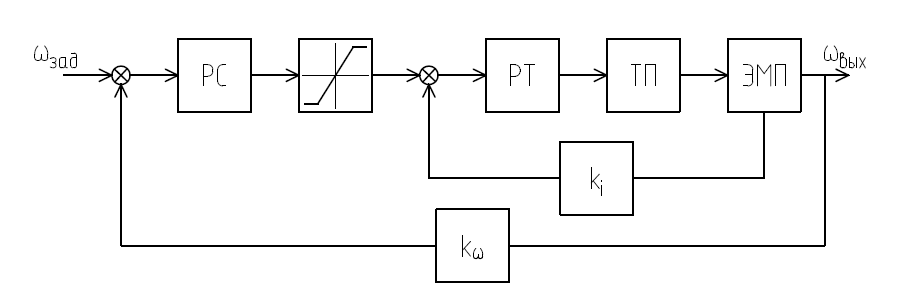
Рисунок 1 – Функциональная схема установки
Исследование характеристик контура тока
Снимем статические характеристики контура тока с П- и ПИ-регулятором. Результаты измерений занесем в таблицу 1
Таблица 1 – Статические характеристики контура тока
П-регулятор |
||
Iзад, В |
ω, об/мин |
Ia, A |
0,8 |
170 |
-0,13 |
0 |
-0,12 |
|
-480 |
-0,17 |
|
-700 |
-0,21 |
|
3,3 |
10 |
-0,29 |
245 |
-0,36 |
|
700 |
-0,51 |
|
ПИ-регулятор |
||
Iзад, В |
ω, об/мин |
Ia, A |
0,8 |
0 |
-0,15 |
540 |
-0,15 |
|
730 |
-0,15 |
|
-450 |
-0,15 |
|
3,0 |
-320 |
-0,66 |
0 |
-0,66 |
|
394 |
-0,66 |
|
810 |
-0,66 |
|
Коэффициент передачи контура тока для П-регулятора:

Рассчитаем коэффициент передачи контура тока согласно формуле (1):

Статическая ошибка для П-регулятора:
Рассчитаем статическую ошибку контура тока согласно формуле (2):

Для ПИ-регулятора коэффициент передачи по току будет равен бесконечности, а статическая ошибка будет равна нулю.
По данным таблицы 1 построим статические характеристики контура тока. Статические характеристики представлены на рисунке 1.
Рисунок 1 – Статические характеристики контура тока
Снимем динамические характеристики контура тока с помощью осциллографа. Динамические характеристики контура тока представлены на рисунках 2 и 3.

Рисунок 2 – Динамическая характеристика контура тока с П-регулятором
Рисунок 3 – Динамическая характеристика контура тока с ПИ-регулятором
Для того, чтобы характеристики имели более читабельный вид, обработаем их в MS Excel методом скользящего среднего с окном 50. Обработанные графики представлены на рисунках 4 и 5.
Рисунок 4 – Обработанная динамическая характеристика контура тока с П-регулятором
Рисунок 5 – Обработанная характеристика контура тока с ПИ-регулятором
Исследование двухконтурной системы
Снимем статические характеристики контура скорости с ПИ-регулятором. Результаты измерений занесем в таблицу 2
Таблица 2 – Статические характеристики контура скорости
Iзад, В |
ω, об/мин |
Мс(Ia), A |
0,8 |
150 |
0,11 |
150 |
0,20 |
|
150 |
0,44 |
|
150 |
0,63 |
|
65 |
0,9 |
|
3,1 |
592 |
0,13 |
592 |
0,22 |
|
592 |
0,42 |
|
592 |
0,62 |
|
220 |
1,04 |
По данным таблицы 2 построим статическую характеристику контура скорости. Статическая характеристика представлена на рисунке 6.
Рисунок 6 – Статические характеристики контура скорости
Снимем динамические характеристики контура скорости с помощью осциллографа. Динамические характеристики контура тока представлены на рисунке 7.
Рисунок 7 – Динамические характеристики контура скорости
Для того, чтобы характеристики имели более читабельный вид, обработаем их в MS Excel методом скользящего среднего с окном 50. Обработанные графики представлены на рисунке 8.
Рисунок 8 – Обработанные характеристики контура скорости
Вывод
В данной лабораторной работе были сняты статические и динамические характеристики контура тока и скорости двухконтурной системы регулирования двигателя постоянного тока. Использование П-регулятора с контуре тока дает нам постоянную статическую ошибку в 75% и коэффициент передачи 0,068. ПИ-регулятор контура тока дает нулевую статическую ошибку и бесконечный коэффициент передачи.
Статическая характеристика контура тока с П-регулятором представляет собой наклонную линию с отрицательным коэффициентом наклона, с ПИ-регулятором – прямую линию. Динамическая характеристика контура тока с П-регулятором представляет собой скачок, при использовании ПИ-регулятора сначала срабатывает П-часть регулятора и мы наблюдаем скачок, потом – И-часть регулятора и он медленно и плавно дорабатывает до установившегося значения.
Статические характеристики контура скорости при разных задающих воздействиях представляют собой прямые линии, которые превращаются в наклонные с отрицательным коэффициентом наклона при достижении тока ограничения. В динамике скорость при набросе входного воздействия сначала растет скачком, потом плавно доходит до установившего значения. Ток сначала выполняет скачок, потом падает до нуля.