

Лаба 1 / СУЭП_Лабораторная работа №1_Токарев_0421
.docxМИНОБРНАУКИ РОССИИ
Санкт-Петербургский государственный
электротехнический университет
«ЛЭТИ» им. В.И. Ульянова (Ленина)
Кафедра РАПС
отчет
по лабораторной работе №1
по дисциплине «Системы управления электроприводом»
ТЕМА: «Исследование машины постоянного тока как звена системы управления
Студент гр. 0421 |
|
Токарев А.А. |
Преподаватель |
|
Константинов К.В. |
Санкт-Петербург
2024
Цель работы: Построить модель ДПТ по экспериментальным данным.
Схема установки представлена на рисунке 1.
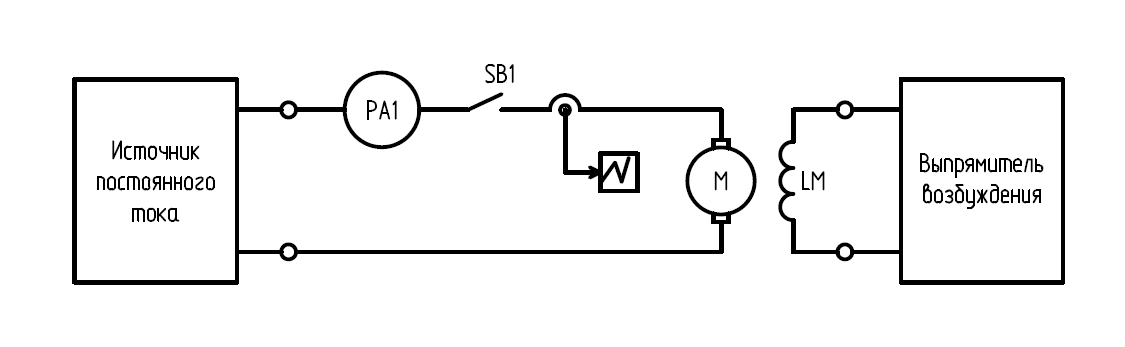
Рисунок 1 – Схема установки
Экспериментальное определение параметров ДПТ
Определение активного сопротивления якоря
Проведем опыт короткого замыкания и измерим напряжение и ток на якоре. Результаты измерений занесем в таблицу 1
Таблица 1 – Опыт короткого замыкания
Ua, В |
19 |
35 |
51 |
Ia, А |
0,5 |
1 |
1,5 |
Активное сопротивление якоря двигателя определяется следующим образом:

Рассчитаем активное сопротивления якоря двигателя для трех измерений согласно формуле (1). В качестве примера приведем расчет при первом измерении:
Повторим вычисления для остальных измерений. Результаты расчета занесем в таблицу 2. Найдем среднее значение активного сопротивления якоря:

Рассчитаем среднее активное сопротивления якоря двигателя согласно формуле (2). Результат расчета занесем в таблицу 2:

Найдем среднеквадратичное отклонение для выполненных измерений:
Вычислим среднеквадратичное отклонение согласно формуле (3). Результат расчета занесем в таблицу 2:

Таблица 2 – Расчет активного сопротивления якоря
Ua, В |
19 |
35 |
51 |
Ia, А |
0,5 |
1 |
1,5 |
Ra, Ом |
38 |
35 |
34 |
|
35,7±1,7 |
||
 ,
Ом
,
Ом
Определение индуктивности якоря
Снимем переходный процесс тока якоря при опыте короткого замыкания. График переходного процесса представлен на рисунке 2.
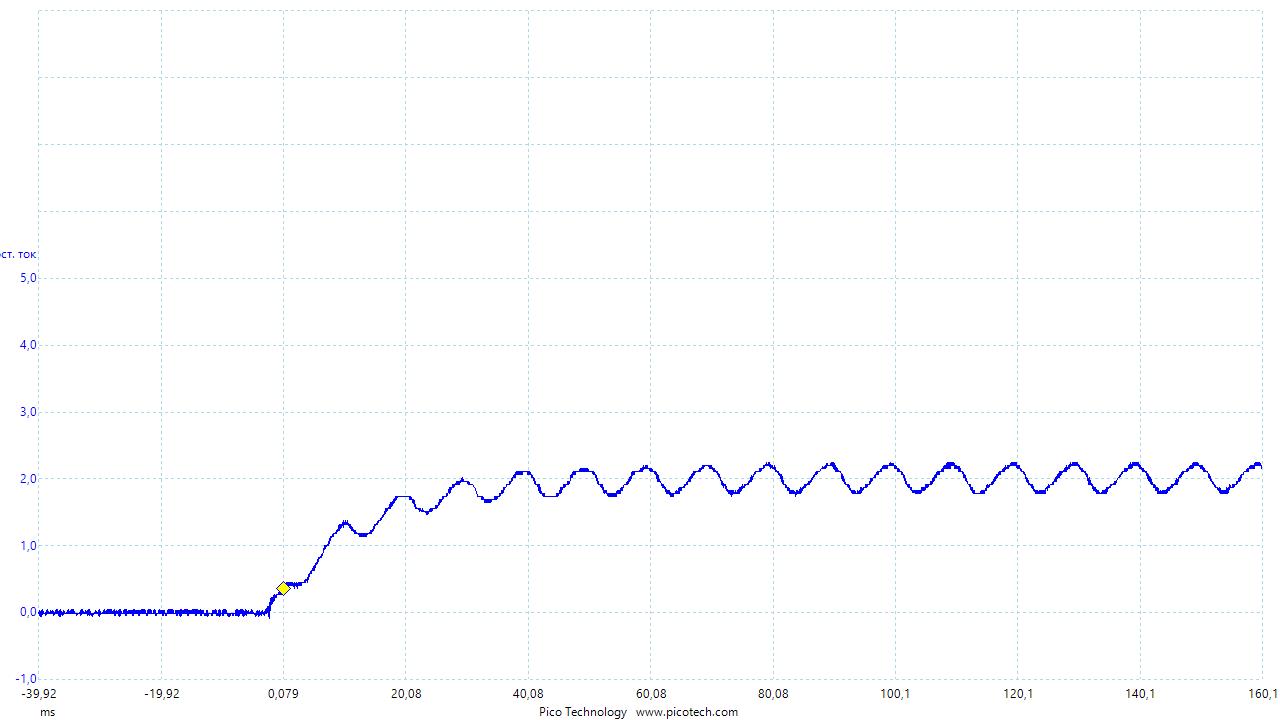
Рисунок 2 – График переходного процесса Ia при заблокированном роторе
Проанализируем полученный график в Excel. Аппроксимируем его с помощью линейного фильтра и построим касательную к графику. Опустим перпендикуляр от точки пересечения касательной и значения установившегося режима на ось абсцисс. Таким образом мы получим значение электрической постоянной времени τэ = 26 мс. Аппроксимированный график представлен на рисунке 3.
Рисунок 3 – График переходного процесса, обработанный в Excel
Индуктивность якоря определяется следующим образом:

Рассчитаем значение индуктивности якоря согласно формуле (4):

Определение конструктивной постоянной
Проведем опыт холостого хода. Измерим напряжение и ток на якоре при разных значениях скорости вращения, которые переведем в рад/с. Измеренные величины занесем в таблицу 3.
Таблица 3 – Опыт холостого хода
Ua, В |
75 |
120 |
171 |
Ia, А |
0,1 |
0,12 |
0,15 |
n, об/мин |
574 |
1008 |
1508 |
ω, рад/с |
60,1 |
105,6 |
157,9 |
Конструктивная постоянная определяется следующим образом:
Рассчитаем значение конструктивной постоянной для трех измерений согласно формуле (5). В качестве примера приведем расчет при первом измерении:

Рассчитаем значения конструктивной постоянной для остальных измерений. Результаты расчета занесем в таблицу 4. Найдем среднее значение конструктивной постоянной:
Рассчитаем среднее значение конструктивной постоянной двигателя согласно формуле (6). Результат расчета занесем в таблицу 4:

Найдем среднеквадратичное отклонение для выполненных измерений:
Вычислим среднеквадратичное отклонение согласно формуле (5). Результат расчета занесем в таблицу 4:

Таблица 4 – Расчет конструктивной постоянной двигателя
Ua, В |
75 |
120 |
171 |
Ia, А |
0,1 |
0,12 |
0,15 |
n, об/мин |
574 |
1008 |
1508 |
ω, рад/с |
60,1 |
105,6 |
157,9 |
СФ |
1,19 |
1,10 |
1,05 |
|
1,11±0,06 |
||

Определение механической постоянной времени
Снимем переходный процесс тока при опыте холостого хода. График переходного процесса представлен на рисунке 4.
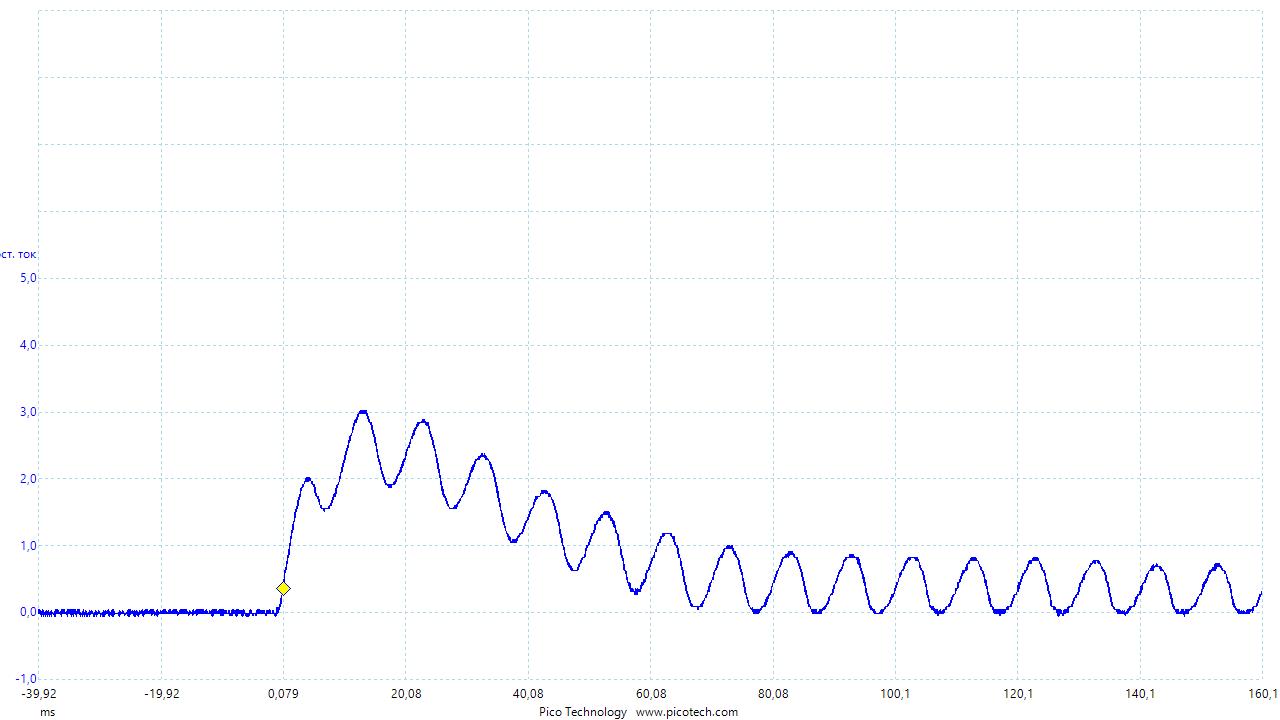
Рисунок 4 – График переходного процесса тока при Мс = 0
Проанализируем полученный график в Excel. Аппроксимируем его с помощью линейного фильтра и построим касательную к графику. Опустим перпендикуляр от точки пересечения касательной и значения установившегося режима на ось абсцисс. Таким образом мы получим значение механической постоянной времени Tм = 71 мс. Аппроксимированный график представлен на рисунке 5.
Рисунок 5 – График переходного процесса, обработанный в Excel
Моделирование ДПТ в Simulink
Соберем модель ДПТ в Simulink. Модель представлена на рисунке 6.
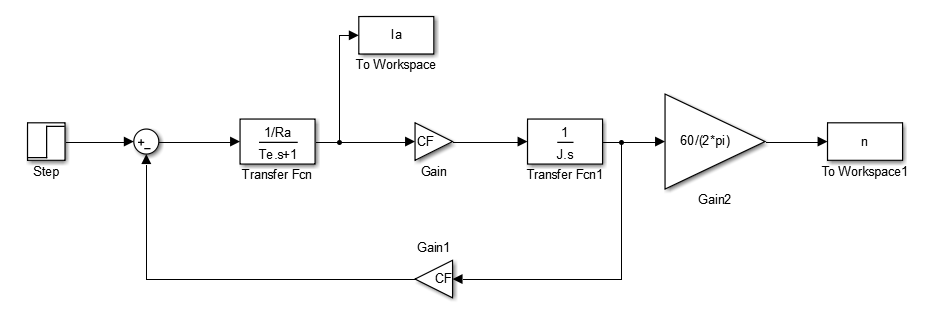
Рисунок 6 – Модель ДПТ
Построим графики тока якоря и скорости вращения ДПТ. Графики представлены на рисунке 7.
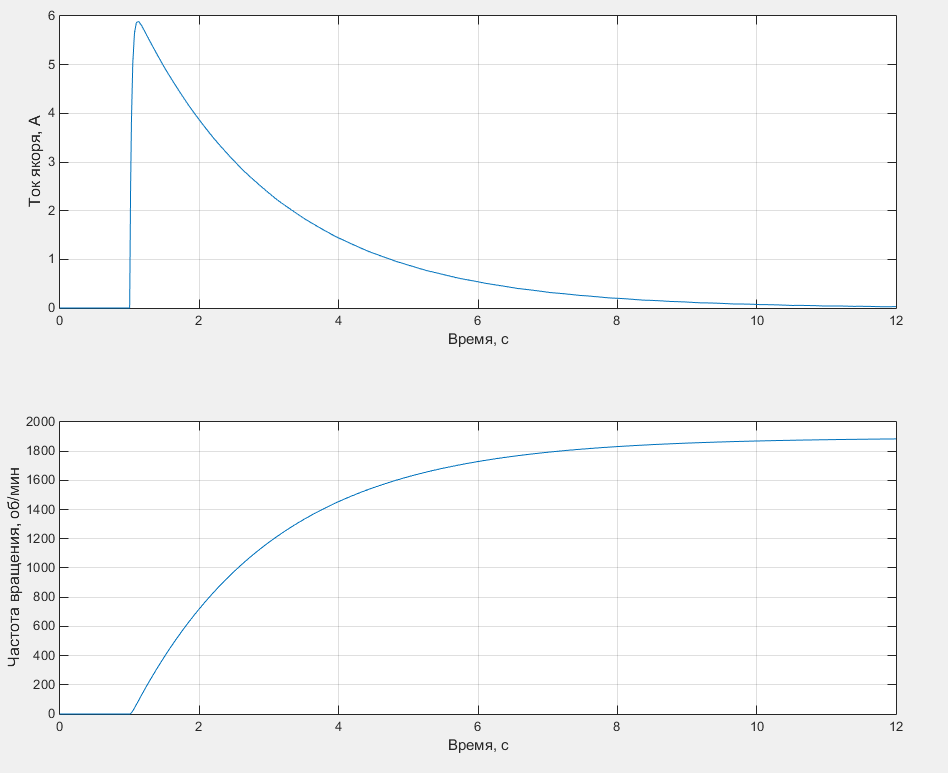
Рисунок 7 – Ток якоря и скорость вращения ДПТ
Как видно из графиков, вид переходных процессов соответствует осциллограммам, полученным на лабораторной установке.
Вывод
В результате лабораторной работы были получены следующие характеристики ДПТ:
Сопротивление якоря Ra = 35,7±1,7 Ом;
Индуктивность якоря La = 0,93 Гн;
Конструктивный коэффициент СФ = 1,11±0,06;
Механическая постоянная времени Тм = 71 мс;
С использованием этих данных была построена модель в Simulink, вид графиков тока и скорости которой соответствует реальному виду, что говорит об адекватности модели.