

3. Выбор комплекта модулей для устройства управления
3.1 Выбор одноплатного промышленного компьютера
В качестве одноплатного промышленного компьютера выберем процессорную плату PCIE-Q370. Для наших задач её будет достаточно, т.к. не нужна большая вычислительная мощность. Внешний вид процессорной платы представлен на рисунке 14.

Рисунок 14 – Внешний вид процессорной платы
Технические характеристики процессорной платы представлены в таблице 9.
Таблица 9 – Технические характеристики процессорной платы
Чипсет |
Intel Q370 |
ОЗУ |
2 Гб |
Интерфейсы |
6хUSB, 2хRS-232, 2xSATA, 1хFDD, 1хLPT, 1хPS/2 |
Разъем |
CPU рабочей станции |
В качестве процессора будем использовать Intel Celeron G3900. Внешний вид процессора представлен на рисунке 15.

Рисунок 15 – Внешний вид процессора
Технические характеристики процессора представлены в таблице 10.
Таблица 10 – Технические характеристики процессорной платы
Частота процессора |
2,8 ГГц |
Кэш |
L2 - 512 Кб, L3 – 2 Мб |
Количество ядер |
2 ядра |
Чипсет |
Intel Q370 |
3.2 Выбор модулей устройств связи с объектом (усо)
Для подключения пультов управления и обучения через Ethernet будем использовать плату сбора данных PCIE-2531NP. Внешний вид платы сбора данных представлен на рисунке 16.

Рисунок 16 – Внешний вид платы сбора данных
Технические характеристики платы сбора данных представлены в таблице 11.
Таблица 11 – Технические характеристики платы сбора данных
Интерфейсы |
Ethernet x 4 |
Скорость передачи данных |
До 1000 Мбит/с |
Гальваническая развязка |
До 1000В постоянного тока |
Разъем |
PCI-Ex16 рабочей станции |
В качестве платы управления шаговыми двигателями будем использовать плату Adlink PCI-8134, которая позволяет управлять 4 шаговыми двигателями. Внешний вид платы управления двигателями представлен на рисунке 17.
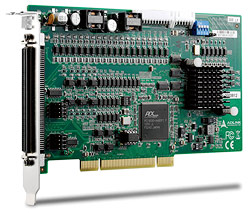
Рисунок 17 – Плата управления двигателями
Технические характеристики платы управления двигателями представлены в таблице 12.
Таблица 12 – Технические характеристики платы управления двигателями
Количество управляемых двигателей |
4 двигателя |
Гальваническая развязка |
До 2500В постоянного тока |
Разъем |
PCI рабочей станции |
Для подключения линейного энкодера ЛИР-9В и трех угловых энкодеров ЛИР-250А необходима плата интерфейса ЛИР-940-ISA-37pin-G1. Четыре концевых выключателей, используемых для калибровки, подключаются к разъему, установленному на дополнительной планке платы. Внешний вид платы интерфейса представлен на рисунке 18.
 Рисунок
18 – Внешний вид платы интерфейса
Рисунок
18 – Внешний вид платы интерфейса
Технические характеристики платы интерфейса представлены в таблице 13.
Таблица 13 – Технические характеристики платы интерфейса
Число подключаемых энкодеров |
До 4 шт. |
Тип входного сигнала |
Прямоугольный импульсный TTL |
Гальваническая развязка |
До 1000В постоянного тока |
Количество цифровых сигналов от внешних устройств |
До 5 шт. |
Разъем |
ISA рабочей станции |
Для подключения концевых выключателей, ограничивающих рабочую зону, выберем плату дискретного ввода-вывода PCL-720+-BE. Внешний вид платы дискретного ввода-вывода представлен на рисунке 19.

Рисунок 19 – Внешний вид платы дискретного ввода-вывода
Технические характеристики платы дискретного ввода-вывода представлены в таблице 14.
Таблица 14 – Технические характеристики платы дискретного ввода-вывода
Количество каналов дискретного ввода |
32 шт. |
Количество каналов дискретного вывода |
32 шт. |
Гальваническая развязка |
До 1000В постоянного тока |
Входной сигнал |
5…40В постоянного тока |
Разъем |
ISA рабочей станции |
Выводы
В данной практической работе была спроектирована система числового программного управления станком Prab 5800.
Была построена структурная схема системы числового программного управления. Было выбрано устройство управления, устройства ввода/вывода. Было определено количество датчиков линейного и углового перемещения и произведен их выбор с учетом погрешности измерительной системы. Также было определено количество концевых выключателей и произведен их выбор. Были также подобраны модули устройств связи с объектом с учетом особенностей подключения устройств ввода/вывода, датчиков, концевых выключателей и исполнительного механизма.
Таким образом, в результате был получен опыт подбора различных устройств для создания системы управления роботом.