

2 Задача 2. Электромагнитный механизм с трехфазной системой питания переменным током
2.1 Исходные данные
Рассматриваются электромагнитный механизм и связная система его питания с пронумерованной последовательностью чередования фаз, представленные на рисунке 4. Пусть напряжения на зажимах фаз равны U1 = U1(t), U2 = U2(t) и U3 = U3(t) соответственно, и определяются известным образом.
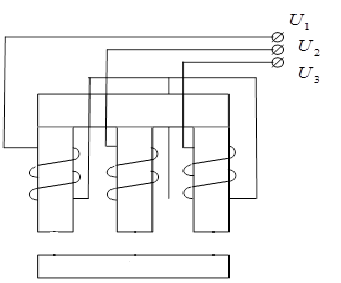
Рисунок 4 – Эскиз электромагнитного механизма
2.2 Задача 2.1
Определить, как это принято, параметры системы питания.
Решение:
При анализе мгновенных значения динамических параметров состояния в установившихся режимах устанавливаются следующие допущения:
Исходим из принципа суперпозиции.
Состояния магнитной и электрической подсистем эмп аппарата рассматриваем как суперпозицию гармонических состояний, мгновенные значения параметров которых для указанных подсистем имеют вид:

где pm – вещественнозначное амплитудное значение параметра p для участвующего в указанной суперпозиции элементарного «чистого» состояния;
ω = 2πf – круговая частота параметра p;
f = 1/T – циклическая частота изменения параметра p;
T – характерное время изменения параметра p, период;
φp – начальная фаза, определяющая значение данного параметра в момент времени t = 0;
Для придания определенности изменениям значений рассматриваемых параметров в принятой к рассмотрению системе отсчета времени будем считать, как это принято, что знак «минус» в определении временной фазы фиксирован и всегда φp ≥ 0.
Изменяющиеся во времени состояния считаем удовлетворяющими условиям квазистационарности, а процессы перехода из одного состояния в другое рассматриваем как квазистатические, для которых всегда справедливо уравнение баланса напряжений:

Считаем, что между намагничивающей силой и магнитным потоком имеет место прямая пропорциональная зависимость (закон Ома):

где – расчетное значение магнитной проводимости, эквивалентное по полному потокосцеплению обмотки;
w – число витков обмотки;
Исходя из принятых выше допущений и линейности выражения (16), определим параметры двухфазной системы питания:
Подставим выражения для первой фазы в (16):

где

где – индуктивность цепи обмотки.
При допущении, что в рассматриваемой цепи ωL >> R:

а также, при учете (18):

т.к. .
Аналогичные выражения для амплитудных значений можно получить для второй и третьей фаз питания. Тогда параметры системы питания, выраженные через напряжение питания и конструктивные параметры электромагнитного механизма, будут равны:

2.3 Задача 2.2.
Какие механические характеристики (параметры) определяют изменения механического состояния якоря в любой момент времени? Определить необходимые параметры.
Решение:
Изменение механического состояния якоря в любой момент времени определяются двумя механическими характеристиками – тяговым усилием и моментом сил тягового усилия. Выберем для рассмотрения правую систему координат, связанную с неподвижным сердечником механизма с направлением оси Ох вдоль длины воздушного зазора. Эскиз электромагнитного механизма представлен на рисунке 5.
X
0
Ф3
M1
r3
r1
σ3
σ2
F3
F2
σ1
n3
n2
F1
n1
F
Ф1
Ф2










M3
Рисунок 5 – Эскиз электромагнитного механизма с указанием сил и моментов сил, действующих на механизм
Пренебрегая выпучиванием магнитных линий из воздушных зазоров, считая магнитное поле в зазорах однородным, находим, что индукция в зазорах электромагнита направлена вдоль оси Ох, т.е. в зазорах от нуля отличны только составляющие индукции:

Отсюда следует, что среди компонентов тензора напряжений в любом из зазоров отличным от нуля является только:

Поэтому, среди компонентов векторов напряжений σ1, σ2 и σ3 к поверхностям границ между якорем и зазорами 1, 2 и 3, отличными от нуля будут только составляющие вдоль оси Х, т.е. σ1 = (σ1xx, 0, 0), σ2 = (σ2xx, 0, 0) и σ3 = (σ3xx, 0, 0). Тогда, учитывая направление векторов единичной нормали n к рассматриваемым граничным поверхностям, согласно определению, находим, что потоки механического импульса, поступающие из соответственных зазоров в якорь, равны:

где S – площади поверхностей якоря, граничащих с зазорами (площади поперечных сечений зазоров).
Пользуясь принципом Сен-Венана, связываем с поступающими в якорь потоками механического импульса ньютоновы силы F1, F2 и F3, равные по величине механическим импульсам, поступающим за единицу времени в якорь со стороны соответственных воздушных зазоров:

имеющим направление вектора плотности потока импульса и точки приложения, совпадающие с центрами масс участков, непосредственно примыкающих к его поверхностям, воспринимающих указанные и обозначенные потоки.
После того, как мы определили параметры механического воздействия магнитного поля, формируемого в воздушных зазорах рассматриваемого электромагнитного механизма, проанализируем изменения механического состояния якоря с позиций механики. При этом якорь будем рассматривать, как абсолютно твердое тело с действующими на него силами, приложенными к разным его точкам. При определении результирующего (от совместного действия выделенных ньютоновых сил) воздействия магнитного поля на якорь, согласно принципам теоретической механики, нам необходимо привести все действующие на него силы к центру масс якоря, осуществить векторное сложение сил, а также определить и сложить моменты рассматриваемых сил относительно указанного центра приведения.
Так как в любой момент времени
 ,
а α2 = 0°, то результирующий момент,
определяемый как:
,
а α2 = 0°, то результирующий момент,
определяемый как:

где r1, r2, r3 – радиус-векторы, направленные от точек приложения сил F1 – F3 к центру масс электромагнитного механизма;
α1, α2, α3 – углы между радиус-векторами r1 – r3 и векторами сил F1 – F3;
будет равен нулю, а результирующая сила, прилагаемая к указанному центру масс, будет равна по величине:

и направлена в направлении вектора плотности потока механического импульса.
Осуществляя очевидное преобразование, для величины результирующего усилия находим:

Постоянный член в этом выражении представляет собой среднее за период значение усилия, совершающего полезную работу. Со вторым членом связано изменяющееся во времени воздействие, приводящее к вибрации в рассматриваемом электромагнитном механизме.