

6 Структура и состав лабораторного стенда
Принципиальная электрическая схема подключения элементов лабораторной установки представлена на рисунке 7.
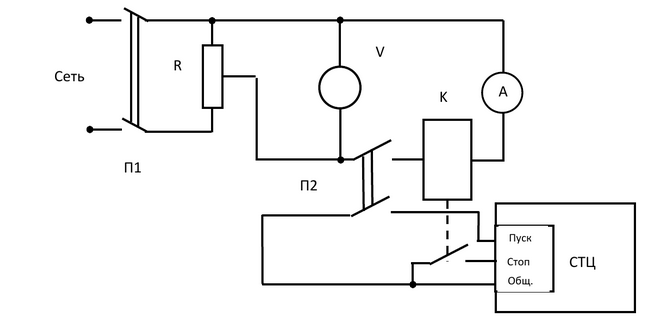
Рисунок 7 – Принципиальная схема лабораторного стенда
В состав лабораторного стенда входят следующие структурные элементы:
тумблер П1 служит для подачи напряжения питания от сети на установку;
реостат R служит для регулирования напряжения управления, подаваемого на обмотку контактора К и контролируемого с помощью вольтметра V;
амперметр А служит для регистрации тока, протекающего в цепи управления;
СТЦ — электронный секундомер СТЦ-2М, служащий для измерения времени срабатывания контактора;
тумблер П2 служит для подачи напряжения управления и запуска электронного секундомера СТЦ-2М. Остановка секундомера осуществляется при замыкании блок–контактов контактора.
В ходе выполнения лабораторной работы следует определять величины усилий, действующих на подвижные элементы контактора. Для подобных измерений используется метод компенсации, состоящий в том, что измеряемое усилие уравновешивается подбираемым равным и противоположным по направлению усилием. Реализация указанного принципа в лабораторном стенде осуществляется с помощью измерительного прибора – пружинного динамометра, принципиальная схема которого изображена на рисунке 8. На представленной схеме измеряемое усилие Fизм уравновешивается реакцией растянутой пружины. Указанная реакция, вследствие закона Гука, измеряется величиной растяжения (сжатия) пружины, которое измеряется смещением, фиксируемым на проградуированной шкале. Градуировка может осуществляться либо в единицах измерения силы (кг, Н, дина), либо в единицах измерения длины (мм, см) — смещения, растяжения (сжатия).
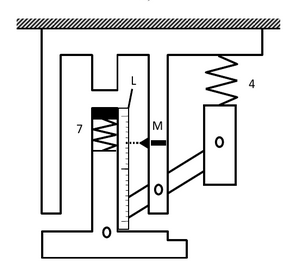
Рисунок 8 – Принципиальная схема измерителя силы
В данной установке динамометр встроен в конструкцию контактора следующим образом. На якоре и демпфере в точках А и В установлены кронштейны для подвешивания грузов G. Измерительная шкала L прибора размещается на подвижном якоре и проградуирована в единицах длины, а на неподвижной части аппарата, связанной с сердечником электромагнитного механизма, фиксирована отметка, обозначенная на схеме с помощью буквы М. Таким образом оказывается возможным определять положение перемещающегося якоря относительно неподвижной системы координат. Роль пружин во встроенном динамометре выполняют контактные и возвратные пружины аппарата (элементы 7 и 4, соответственно). Действующие на якорь реакции указанных пружин, а также тяговое усилие в ходе измерений уравновешиваются весами стандартных грузов G, имеющих массы m 2, 1, 0.5, 0.3, 0.2 и 0.1 кг . Эти значения масс и определяют состав и цену деления шкалы измерения сил, входящую в состав рассматриваемого измерительного прибора. Принцип действия измерителя силы представлен на рисунке 9.
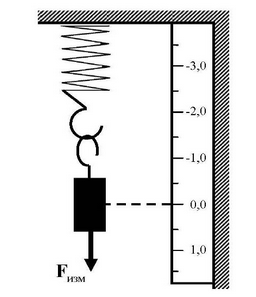
Рисунок 9 – Принцип действия измерителя силы
Измерения положения якоря с помощью измерительной шкалы L осуществляются в относительных единицах, поскольку в качестве начала отсчета по этой шкале следует выбирать только такое положение якоря, которое соответствует установившемуся ненагруженному состоянию контактора. Указанное установившееся состояние может быть определено на измерителе L в условиях обесточения установки путем выбора наибольшей возможной величины зазора max с помощью регулировочного винта 8 (см. рис. 8). Обозначим показание измерителя L, соответствующее такому положению якоря через lmax. Тогда при подаче э.-м. нагрузки на механизм якорь будет двигаться вверх и любое его положение l при этом будет представляться измерителем смещением x = lmax – l от обозначенного установившегося ненагруженного состояния. Величина зазора тогда будет равна:
