

МИНОБРНАУКИ РОССИИ
Санкт-Петербургский государственный
электротехнический университет
«ЛЭТИ» им. В.И. Ульянова (Ленина)
Кафедра РАПС
отчет
по лабораторным работам №2-4
по дисциплине «Электронные и электрические аппараты»
Тема: «Исследование электромагнитного контактора»
Студенты гр. 0421 |
|
Токарев А.А. |
|
|
Грибанов И.К. |
|
|
Зеленков Д.И. |
Преподаватель |
|
Сепп Ю.И. |
Санкт-Петербург
2023
Содержание
1 Протокол измерений 3
2 Цель работы 4
3 Постановка задач 4
4 Описание объекта изучения 5
5 Параметры объекта, подлежащие измерению, а также их связь с физическим функционированием объекта 8
6 Структура и состав лабораторного стенда 12
7 Методика и последовательность проведения эксперимента. Лабораторная работа № 2 15
8 Методика и последовательность проведения эксперимента. Лабораторная работа № 3 15
9 Методика и последовательность проведения эксперимента. Лабораторная работа № 4 16
10 Обработка результатов измерений. Лабораторная работа №2 16
11 Анализ результатов измерений. Лабораторная работа №2 19
12 Обработка результатов измерений. Лабораторная работа №3 19
13 Анализ результатов измерений. Лабораторная работа №3 23
14 Обработка результатов измерений. Лабораторная работа №4 25
15 Анализ результатов измерений. Лабораторная работа №4 27
16 Выводы по работе 27
17 Список используемой литературы 29
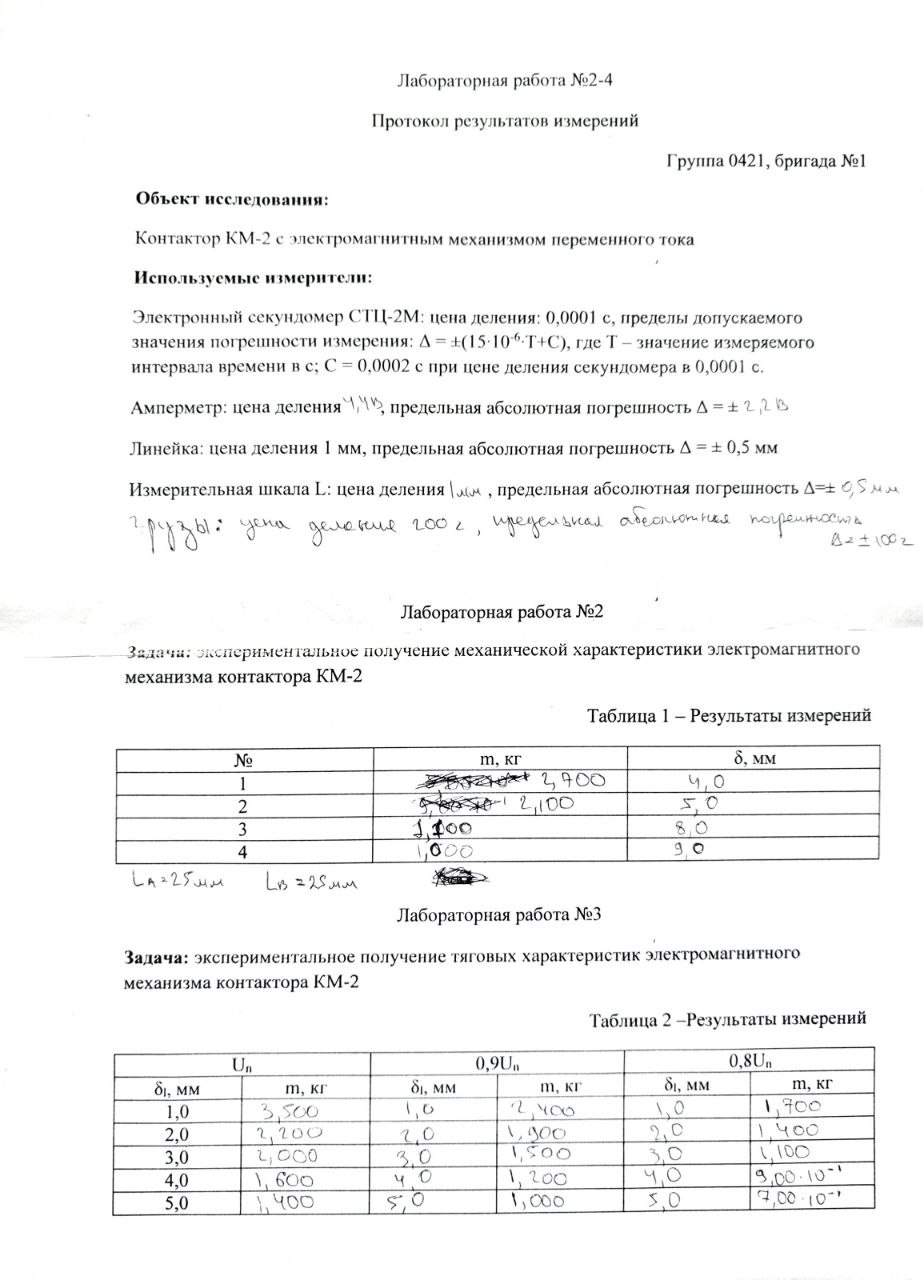
1 Протокол измерений
2 Цель работы
Цель работы – изучение принципа действия, устройства, конструктивных особенностей, характеристик (механической, тяговых и временных) и параметров электромагнитного контактора (напряжение управления, время срабатывания, величина воздушного зазора, etc).
3 Постановка задач
Для достижения поставленной цели в ходе выполнения работы, необходимо решить следующие задачи:
Изучить принцип действия, устройство, конструктивные особенности электромагнитного контактора. Определить характеристики и параметры, используемые для оценки свойств и состояний указанного устройства.
Ознакомиться со структурой, составом, особенностями и назначением лабораторного стенда, используемого для экспериментального исследования электромагнитного контактора.
В лабораторной работе №2: выполнить эксперименты по натурному получению механической характеристики электромагнитного контактора. Надлежащим образом представить результаты.
Осуществить анализ экспериментально полученной механической характеристики электромагнитного контактора на предмет оценки параметров возвратной и контактной пружин электромагнитного контактора, а также на предмет определения характеристик достоверности представления обозначенных параметров.
В лабораторной работе №3: выполнить эксперименты по натурному получению тяговых характеристик электромагнитного контактора. Надлежащим образом представить результаты.
Осуществить анализ экспериментально полученных тяговых характеристик электромагнитного контактора: сравнить между собой полученную в лабораторной работе №2 механическую и полученные в лабораторной работе №3 тяговые характеристики электромагнитного контактора на предмет выявления величины полезной работы, совершаемой при перемещении якоря; сравнить между собой рассчитанную тяговую характеристику и снятые экспериментально.
В лабораторной работе №4: выполнить эксперименты по натурному получению временных характеристик электромагнитного контактора. Надлежащим образом представить результаты.
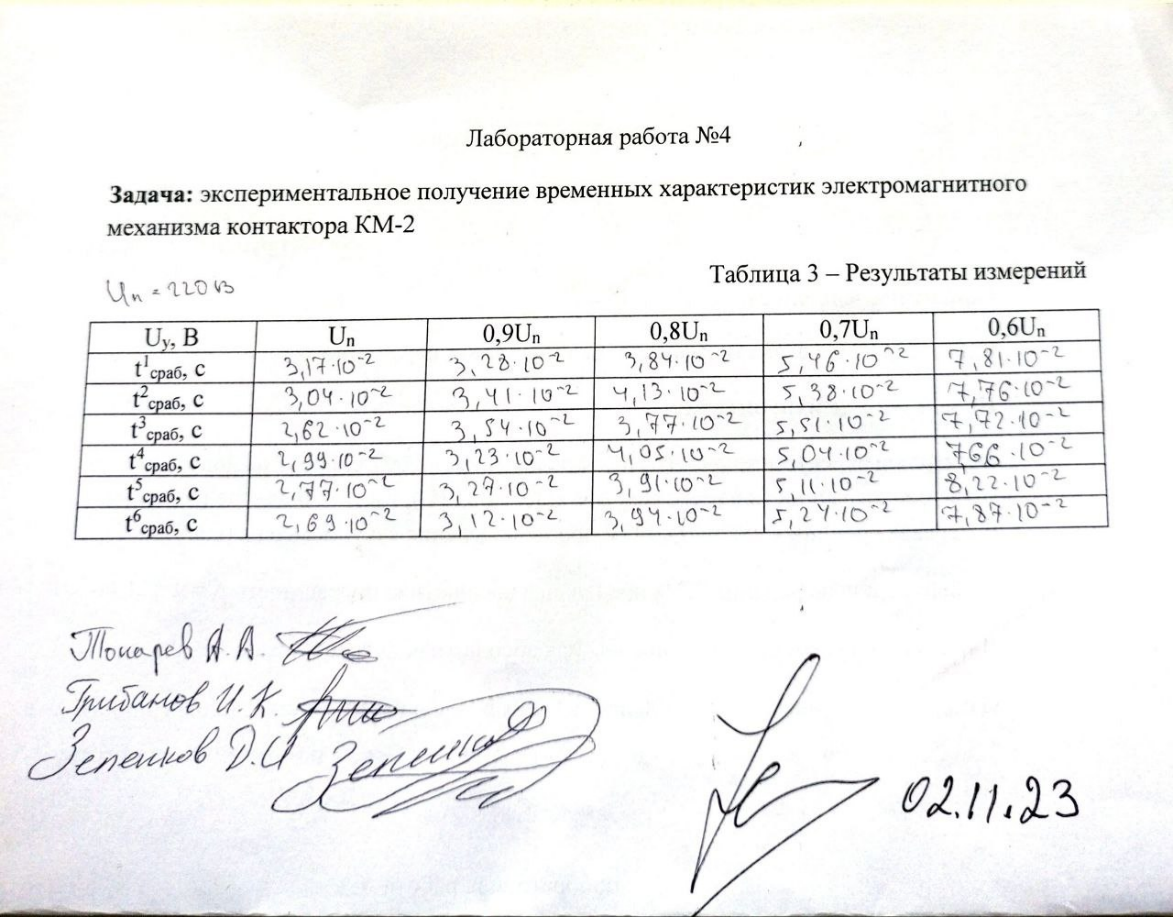
Осуществить анализ экспериментально полученных временных характеристик электромагнитного контактора: определить и зафиксировать значение минимально допустимого снижения напряжения управления Umin вместе со значением параметра, характеризующего степень достоверности найденного значения.
4 Описание объекта изучения
Контактор – дистанционно управляемый коммутационный аппарат, предназначенный для частых коммутаций (до 1500 переключений в час) электрических цепей при нормальных (номинальных) режимах работы. Применяются для дистанционного управления электрическими машинами и аппаратами в установках постоянного и переменного тока при напряжения до 500-650 В и силе тока до 600 А.
Наиболее широкое применение получили электромагнитные контакторы, т.е. имеющие электромагнитный привод. Управление контактором осуществляется посредством вспомогательной цепи переменного тока, проходящего по катушкам контактора, напряжением 24, 42, 110/127, 220 или 380 вольт. Указанные цепи называются цепями управления контактором, а напряжения, подаваемые на обмотки возбуждения электромагнитного механизма контактора, носят название напряжений управления.
В лабораторных работах исследуется контактор типа КМ-2 с электромагнитным механизмом переменного тока. Внешний вид контактора представлен на рисунке 1.
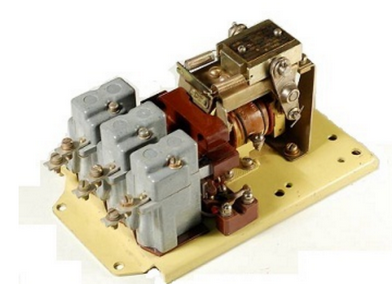
Рисунок 1 – внешний вид контактора КМ-2
Контакторы типа КМ-2 состоят из:
дугогасительных камер;
главных контактов, мостикового типа;
вспомогательных контактов, могут быть мостикового, клинового или перекидного типа;
подвижной системы;
электромагнитной системы;
основания;
Кинематическая схема электромагнитного механизма контактора представлена на рисунке 2.
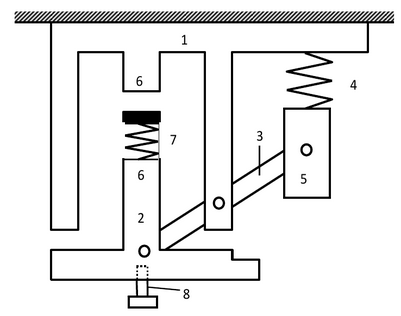
Рисунок 2 – Кинематическая схема электромагнитного механизма контактора
На рисунке 2 части кинематической схемы электромагнитного механизма контактора обозначены следующим образом:
Шихтованный сердечник из листов электротехнической стали;
Шихтованный якорь;
Коромысло;
Возвратные пружины;
Дополнительная масса (демпфер);
Контактная система;
Контактные пружины;
Дополнительный регулировочный винт;
Действующие на элементы электромагнитного механизма силы представлены на рисунке 3.
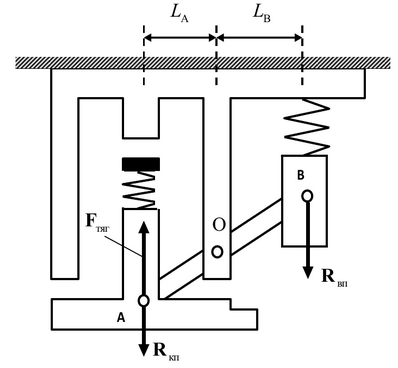 Рисунок
3 – Силы, действующие на элементы
электромагнитного механизма
Рисунок
3 – Силы, действующие на элементы
электромагнитного механизма
На рисунке 3:
Fтяг – вектор тягового усилия, соответствующего электромагнитной силе Fэм;
Rвп – вектор реакции возвратных пружин;
Rкп – вектор реакции контактных пружин;
Все представленные усилия определены при условии, что якорь является абсолютно жёстким телом. Через LA и LB обозначены плечи действия указанных сил относительно центра вращения коромысла О. Так как рассматриваемая конструкция в лабораторных условиях располагается вертикально по отношению к земле, то векторы реакций Rвп и Rкп должны учитывать также веса якоря, демпфера и соответственных частей коромысла.
При рассмотрении условий равновесия
действующих сил необходимо все действующие
усилия приводить к одной неподвижной
системе координат. В качестве таковой
следует рассматривать систему координат,
связанную с центром вращения коромысла
О. Предполагая, что коромысло является
абсолютно твердым телом, статические
моменты представленных сил можно
записать в виде:
где через Fтяг, Rкп и Rвп обозначены величины векторов соответственных сил в выбранной системе координат, а через Mтяг, Mкп и Мвп обозначены соответствующие им моменты.