

Исследование систем с реле гистерезисного типа с зоной нечувствительности
Соберем схему системы для случая реле гистерезисного типа с зоной нечувствительности, отсутствия коррекции по скорости и нулевого входного сигнала. Установим параметры звеньев согласно таблице 1. Схема представлена на рисунке 39.
Рисунок 39 – Структурная схема для исследования свободного движения системы
Построим фазовый портрет для малого отклонения x10 = 1. Для этого построим зависимость x2(t) от x1(t). Фазовый портрет представлен на рисунке 40.
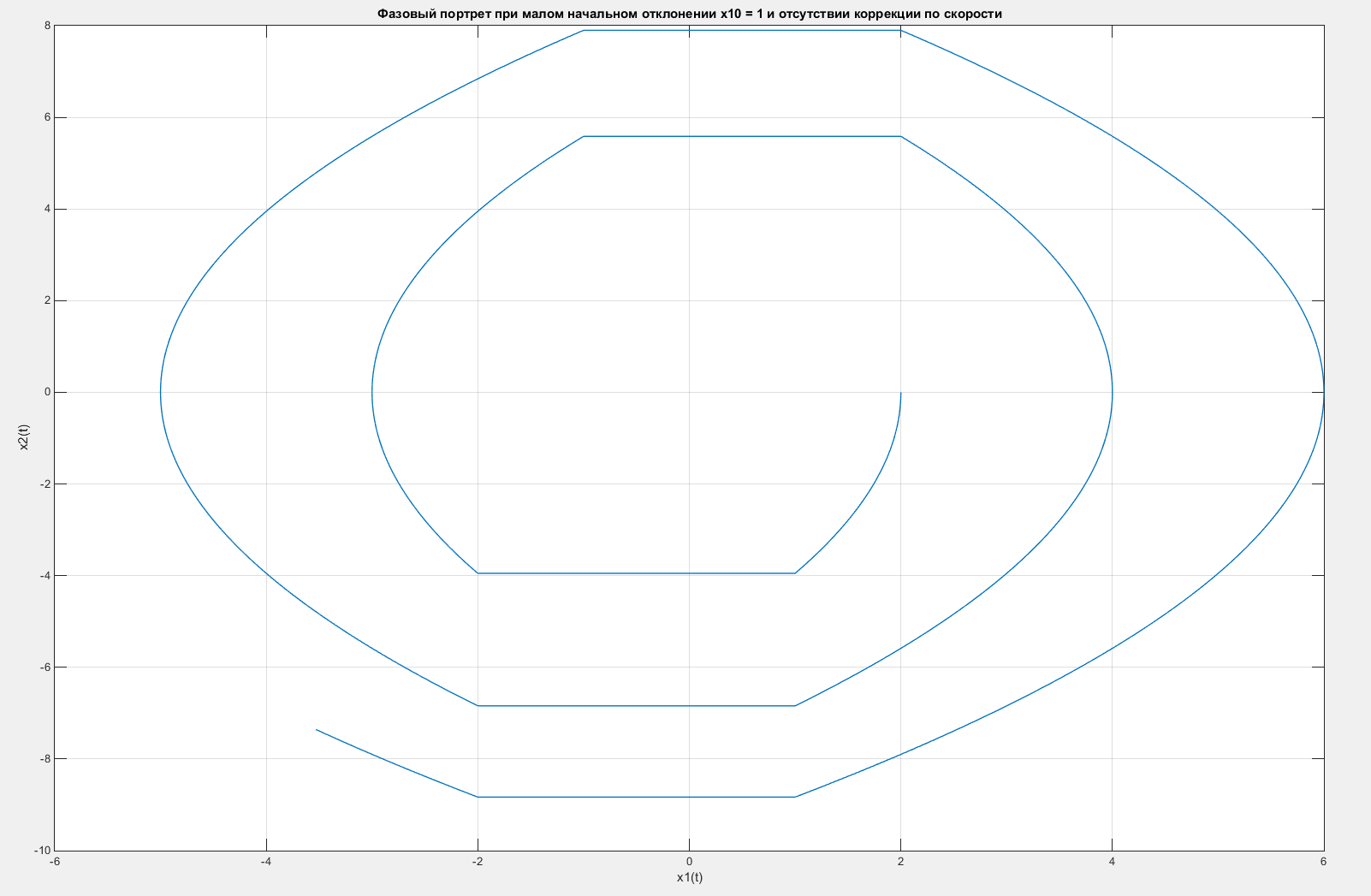
Рисунок 40 – Фазовый портрет системы для случая малого начального отклонения
Графики зависимости x1(t) и x2(t) представлены на рисунке 41.
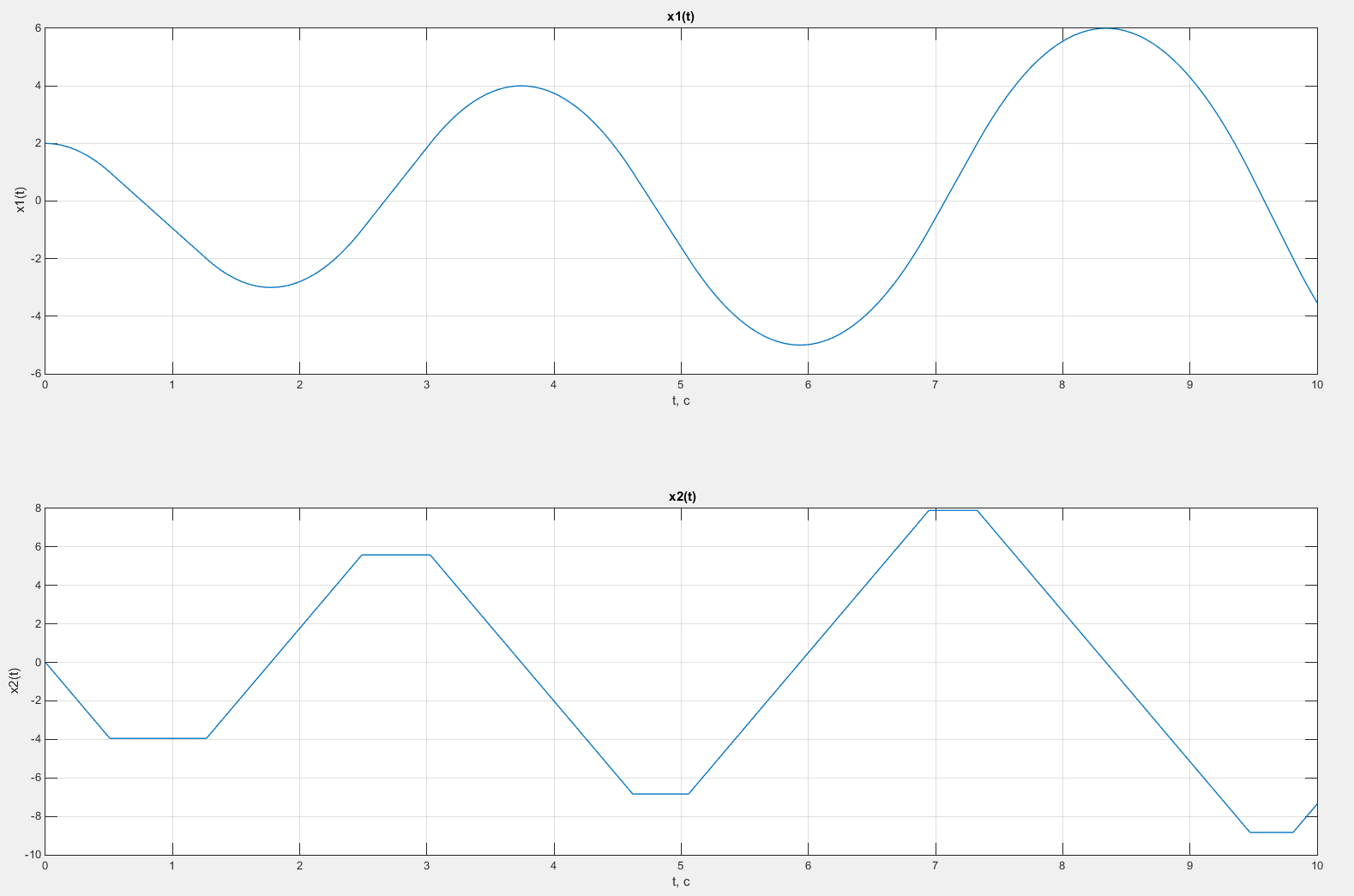
Рисунок 41 - Графики зависимостей x1(t) и x2(t) для случая малого начального отклонения
Введем коррекцию по скорости. Схема с коррекцией по скорости представлена на рисунке 42.
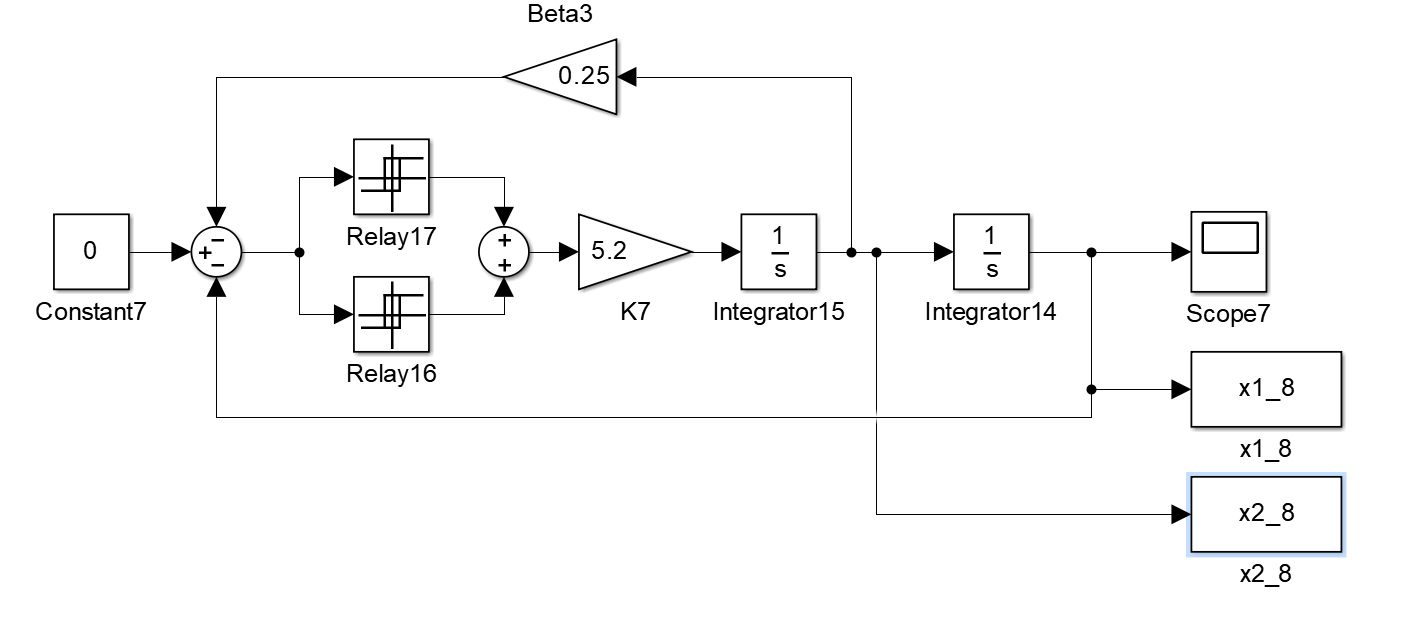
Рисунок 42 – Схема системы с введенной коррекцией по скорости
Зададим коэффициент обратной связи β = 0,25; 0,5; 1 и построим фазовые портреты и графики изменения x1(t) и x2(t) для этих значений коэффициента β. Фазовые портреты, а также графики изменения x1(t) и x2(t) для системы с различными коэффициентами обратной связи представлены на рисунках 43 –48.
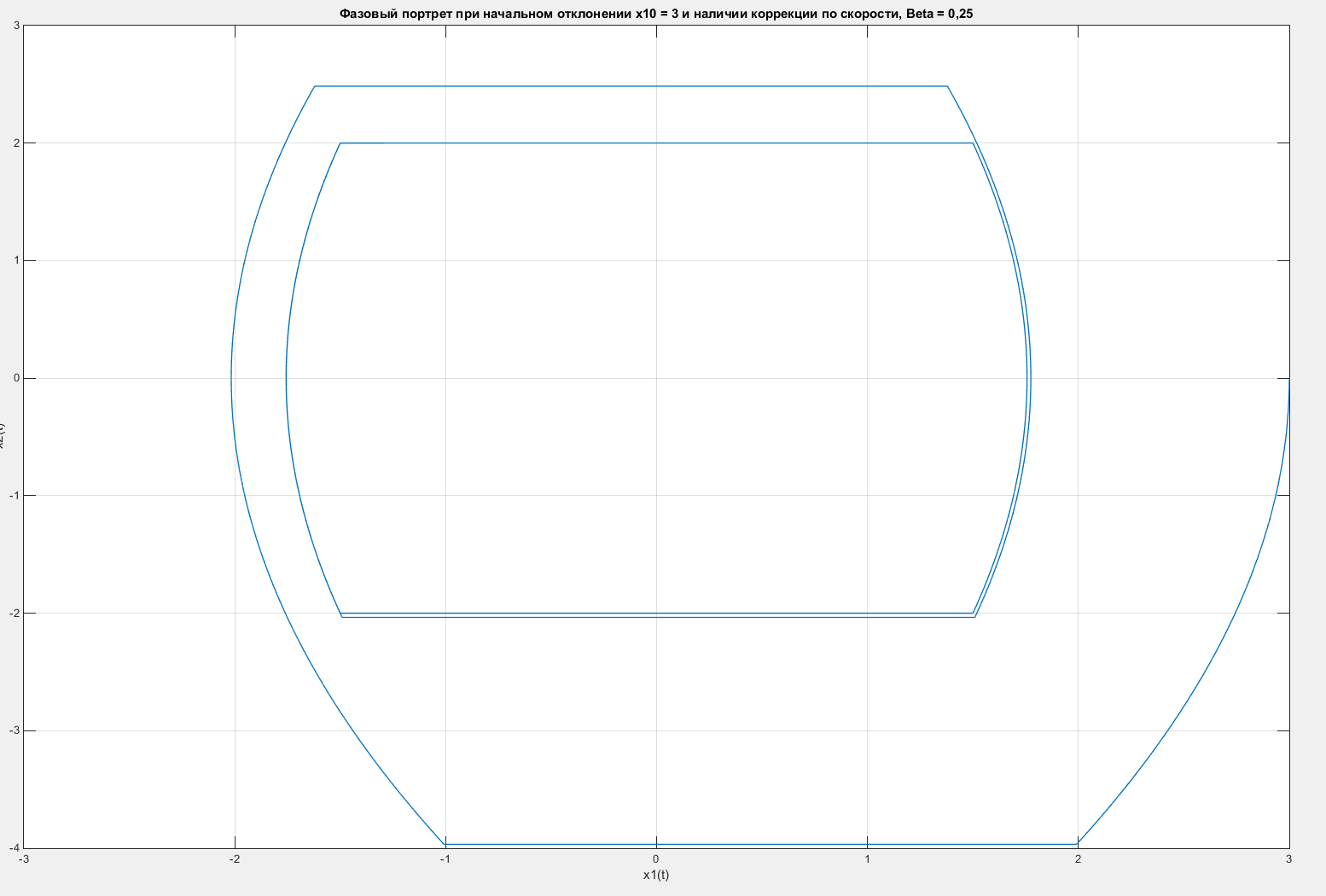
Рисунок 43 – Фазовый портрет системы с введенной коррекцией по скорости с коэффициентом β = 0,25
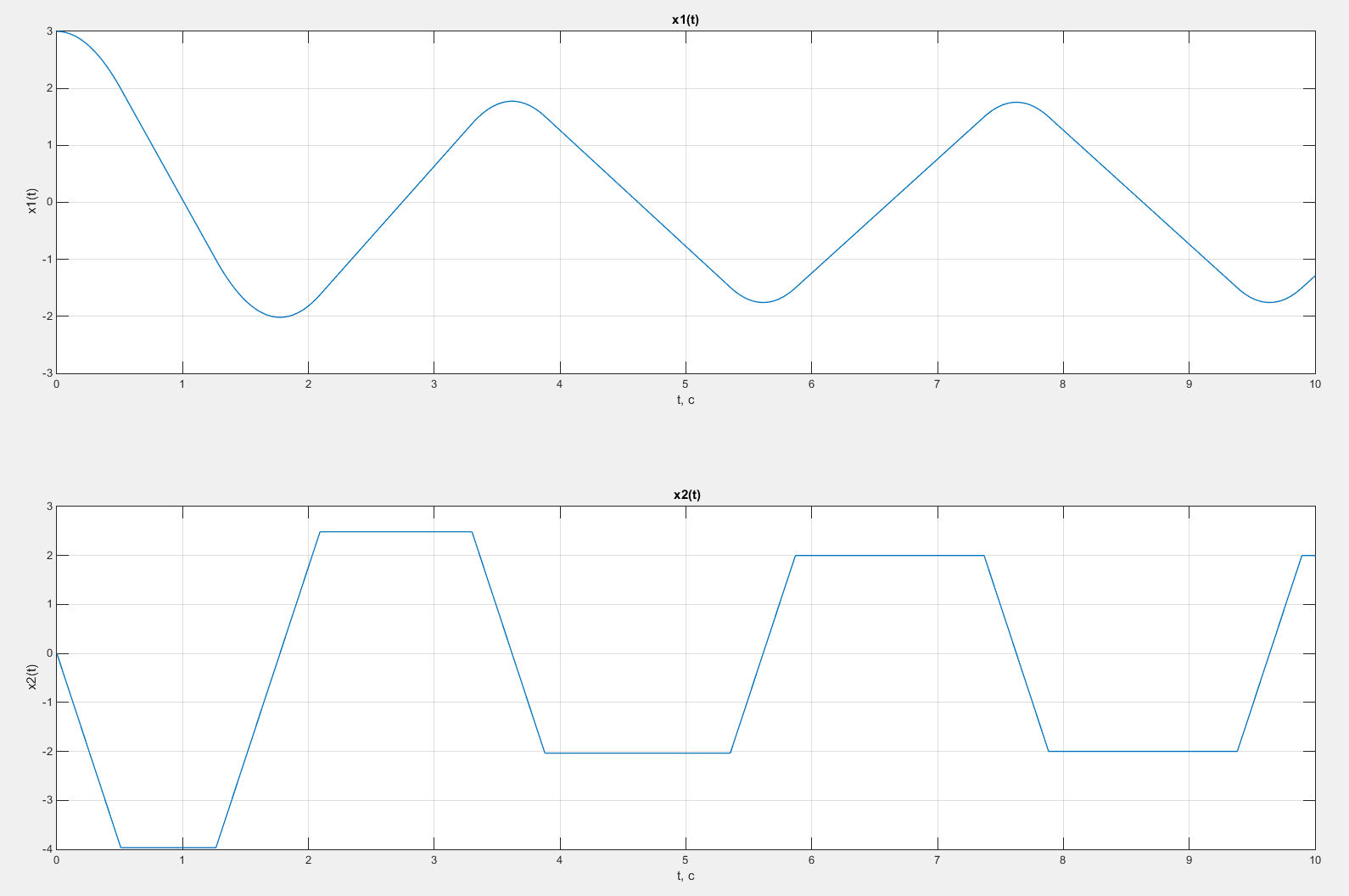
Рисунок 44 – Графики зависимостей x1(t) и x2(t) в случае введения коррекции по скорости с коэффициентом β = 0,25
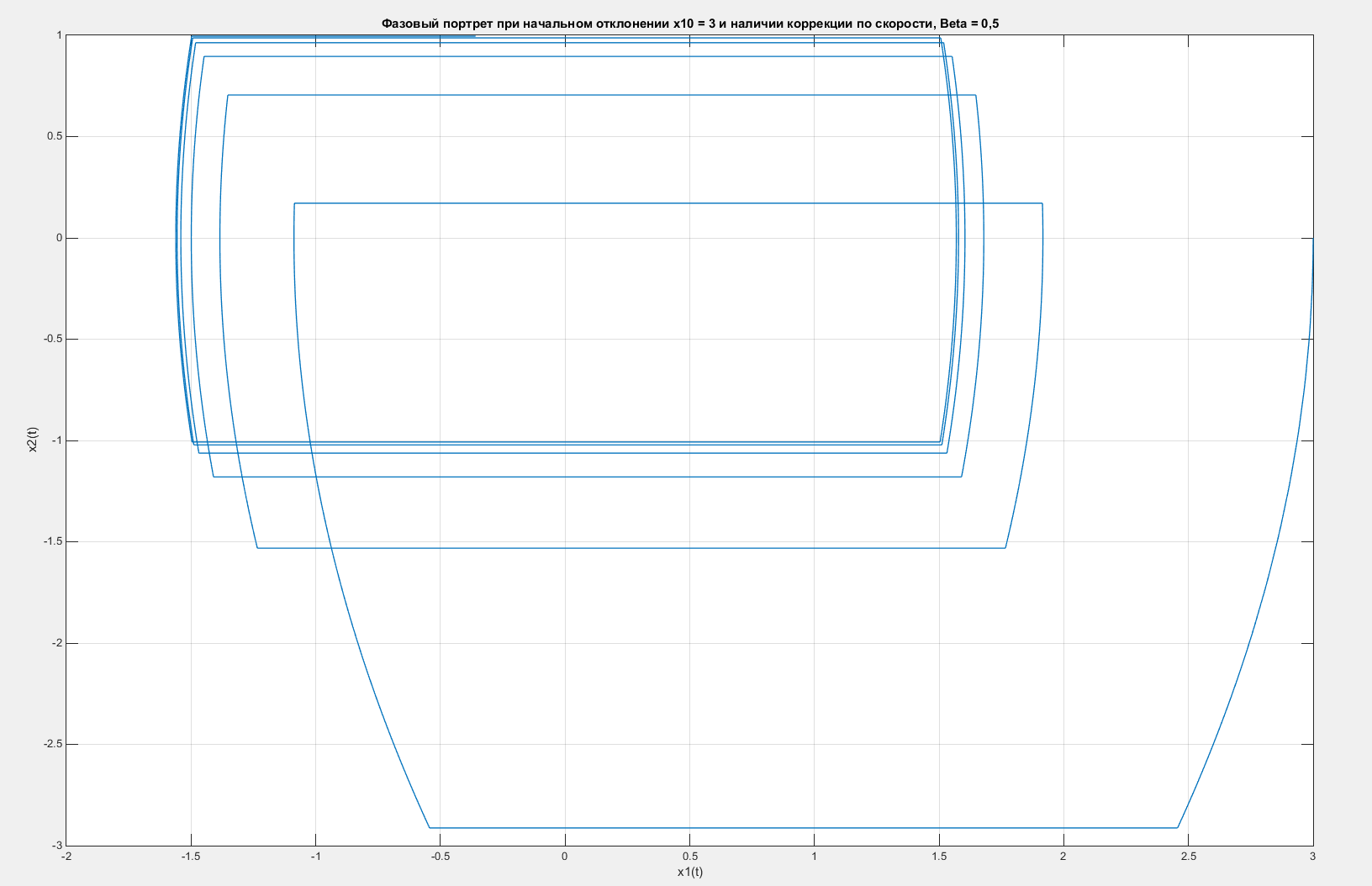
Рисунок 45 – Фазовый портрет системы с введенной коррекцией по скорости с коэффициентом β = 0,5
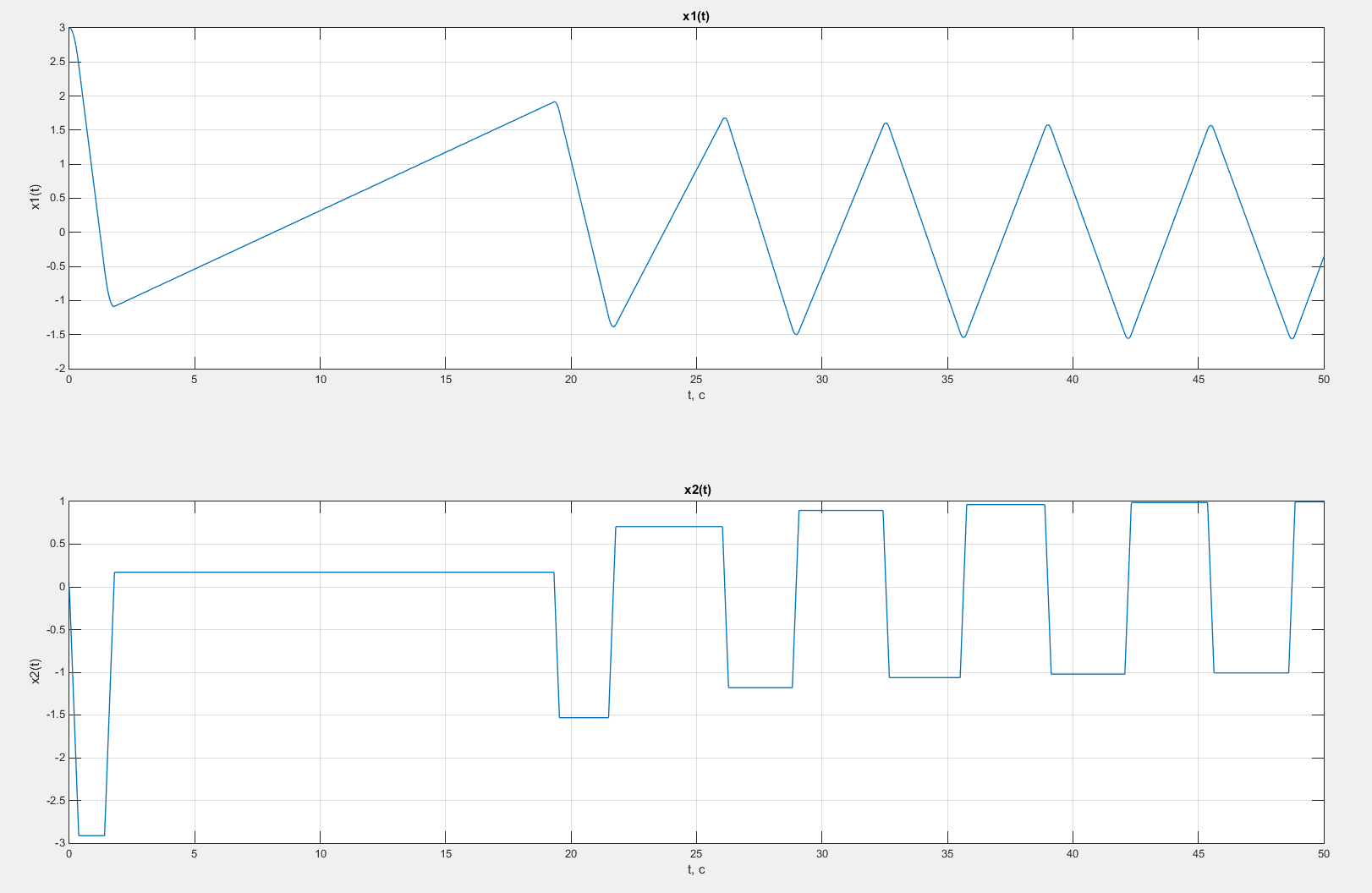
Рисунок 46 – Графики зависимостей x1(t) и x2(t) в случае введения коррекции по скорости с коэффициентом β = 0,5
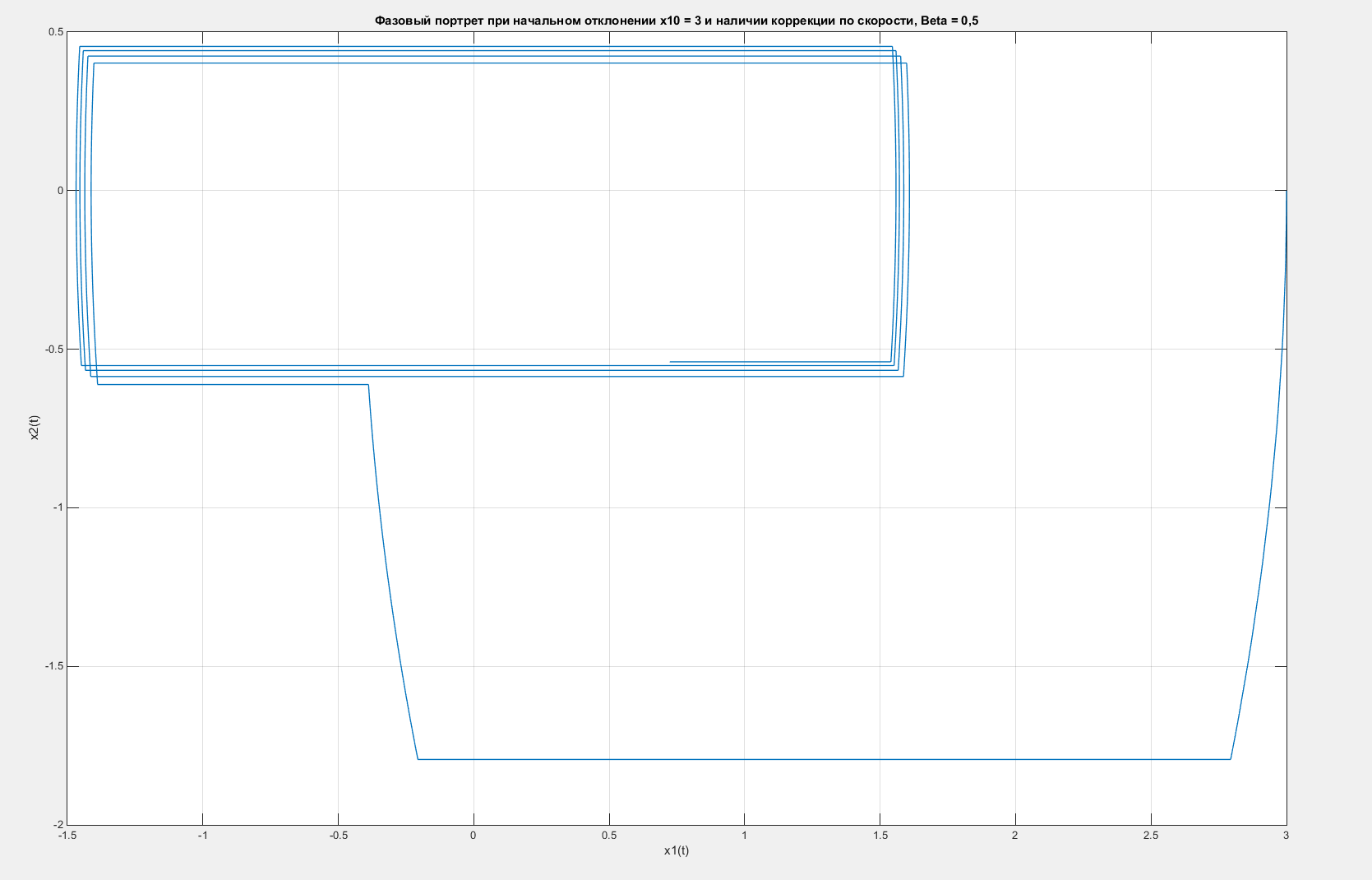
Рисунок 47 – Фазовый портрет системы с введенной коррекцией по скорости с коэффициентом β = 1
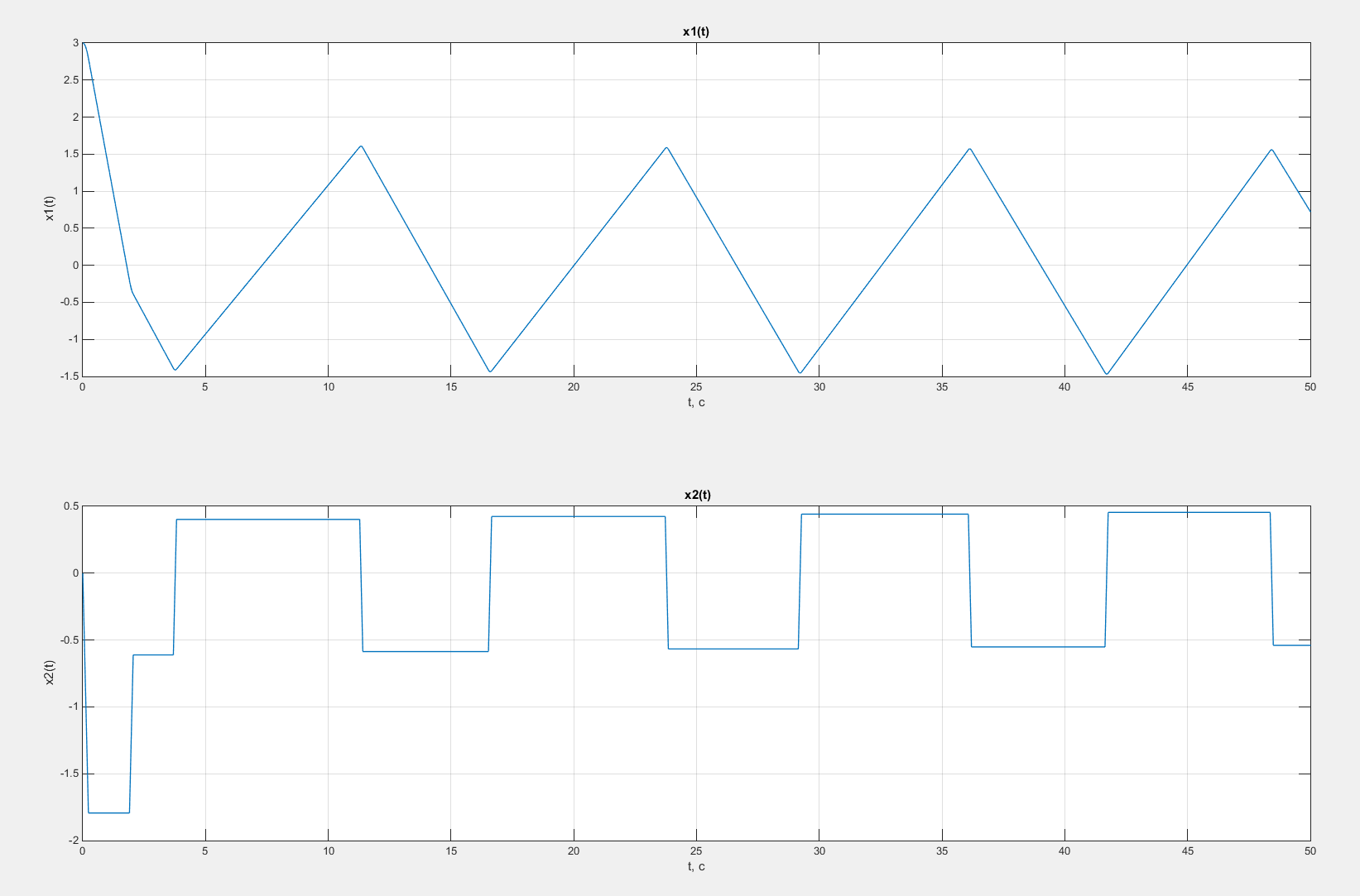
Рисунок 48 – Графики зависимостей x1(t) и x2(t) в случае введения коррекции по скорости с коэффициентом β = 1
Исследование объекта управления вида
Исследование систем с идеальным двухпозиционным реле
Соберем схему системы для случая идеального двухпозиционного реле, отсутствия коррекции по скорости и нулевого входного сигнала. Установим параметры звеньев согласно таблице 1. Схема представлена на рисунке 49.
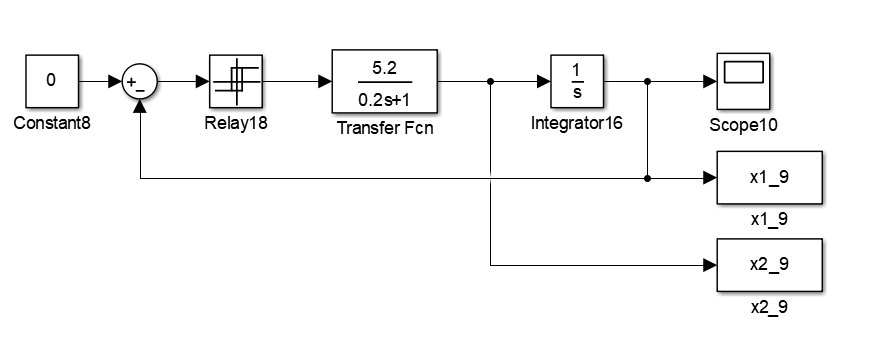
Рисунок 49 – Структурная схема для исследования свободного движения системы
Построим фазовый портрет для случая свободного движения системы. Для этого построим зависимость x20(t) от x10(t). Фазовый портрет представлен на рисунке 50.
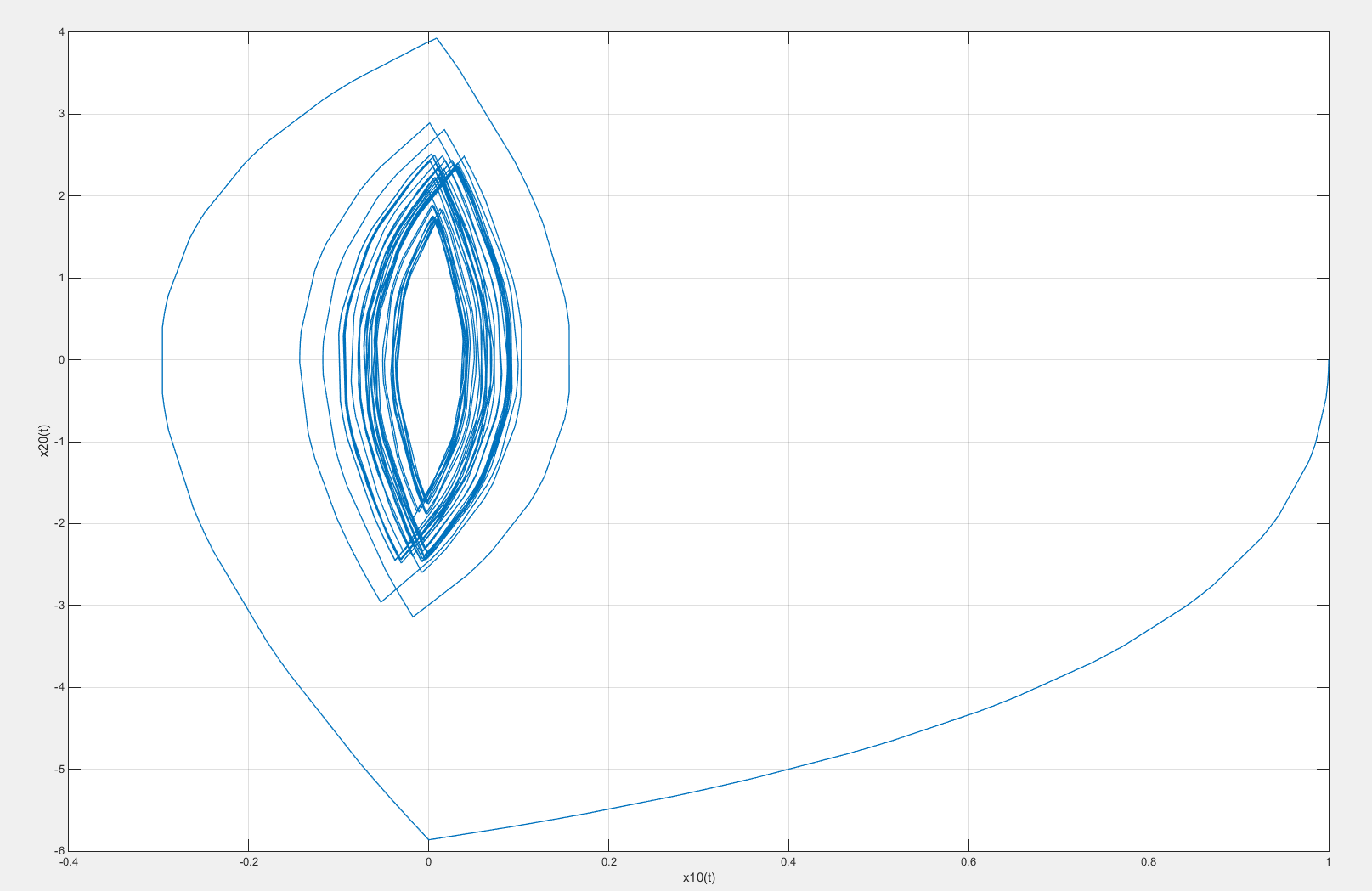
Рисунок 50 – Фазовый портрет свободного движения системы
Графики зависимости x1(t) и x2(t) представлены на рисунке 51.
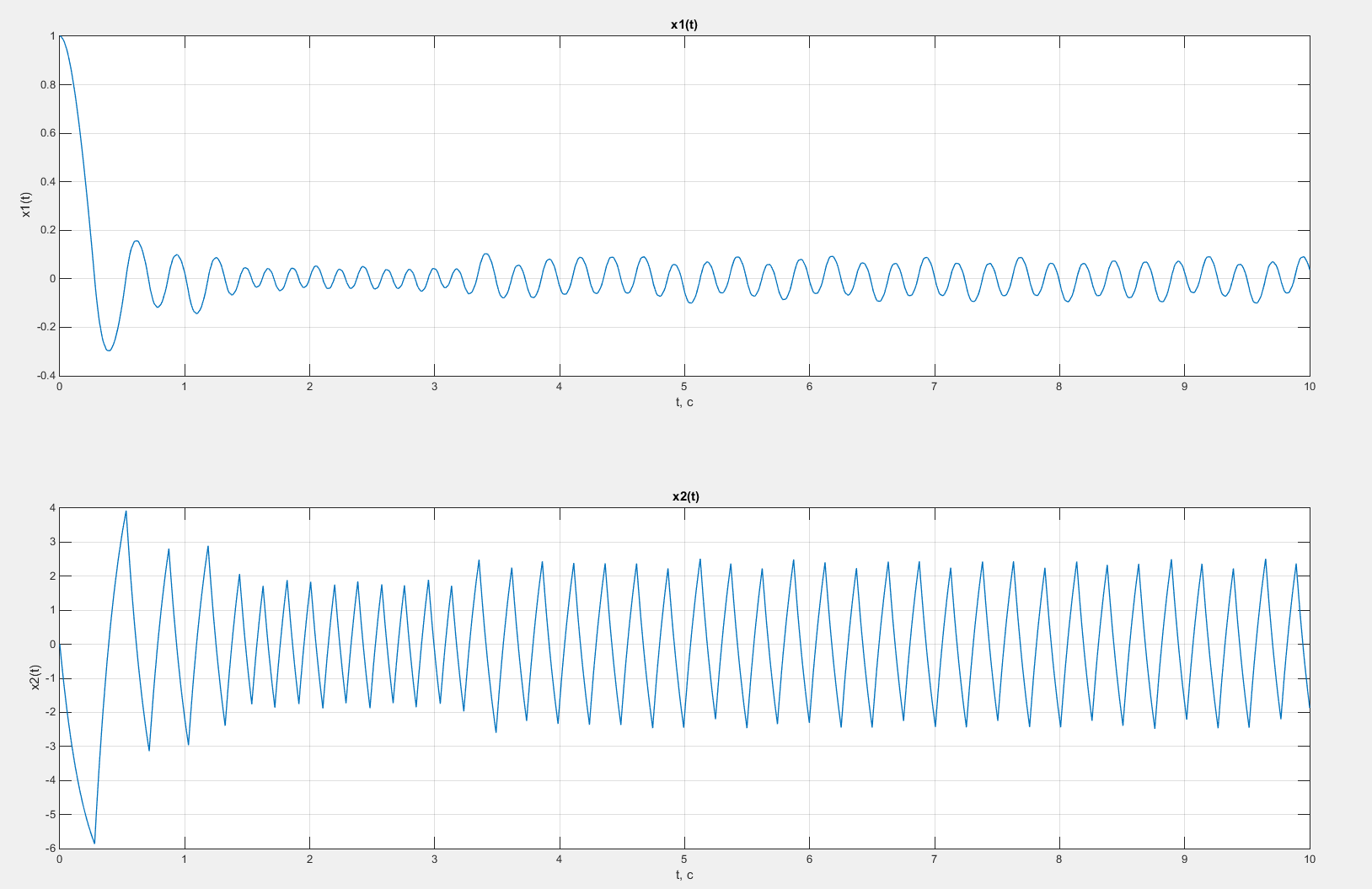
Рисунок 51 – Графики зависимостей x1(t) и x2(t) в случае свободного движения системы
Введем коррекцию по скорости. Схема с коррекцией по скорости представлена на рисунке 52.
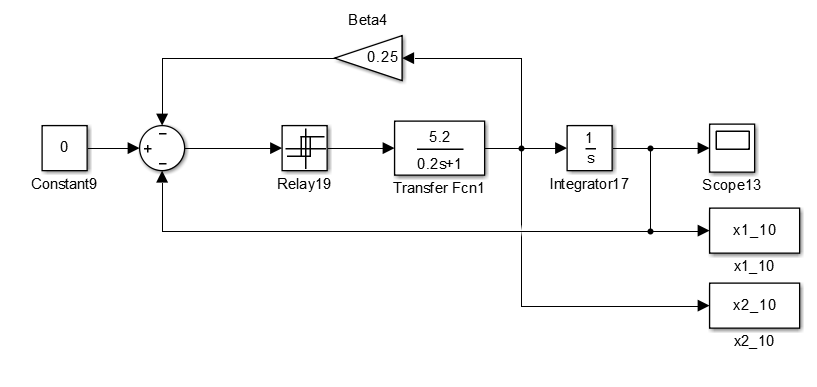
Рисунок 52 – Схема системы с введенной коррекцией по скорости
Зададим коэффициент обратной связи β = 0,25; 0,5; 1 и построим фазовые портреты и графики изменения x1(t) и x2(t) для этих значений коэффициента β. Фазовые портреты, а также графики изменения x1(t) и x2(t) для системы с различными коэффициентами обратной связи представлены на рисунках 53 –58.
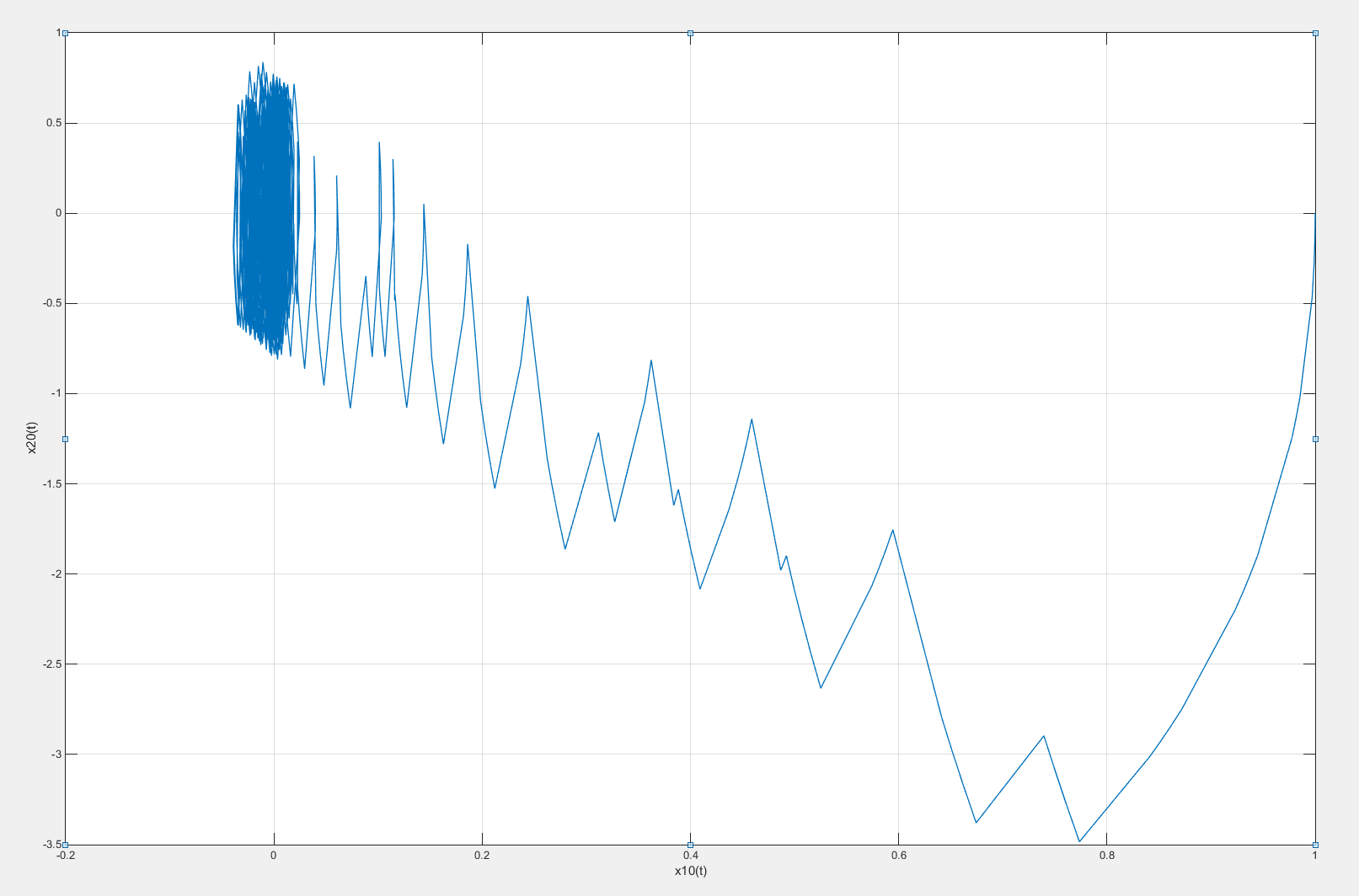
Рисунок 53 – Фазовый портрет системы с введенной коррекцией по скорости с коэффициентом β = 0,25

Рисунок 54 – Графики зависимостей x1(t) и x2(t) в случае введения коррекции по скорости с коэффициентом β = 0,25
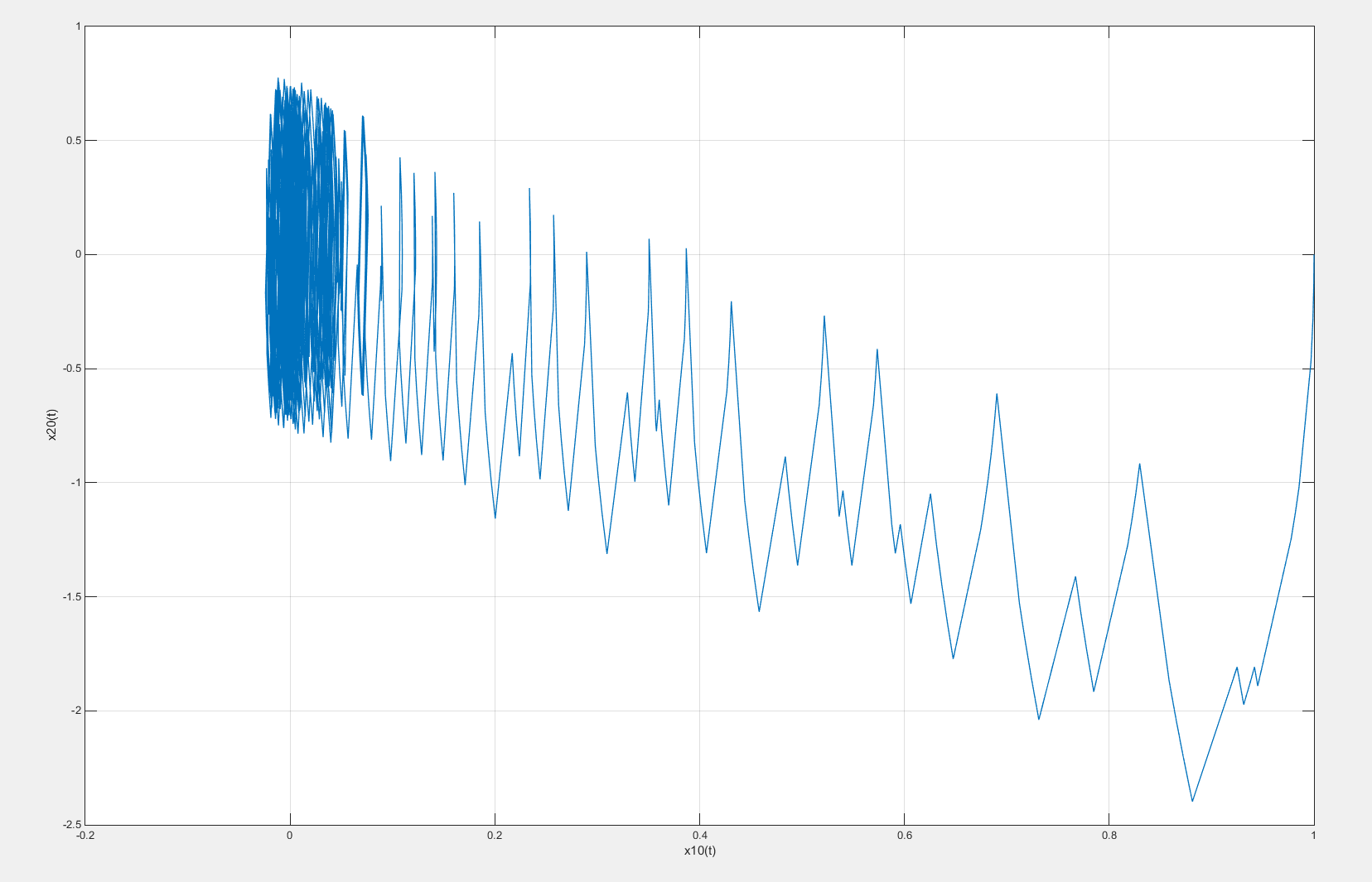
Рисунок 55 – Фазовый портрет системы с введенной коррекцией по скорости с коэффициентом β = 0,5
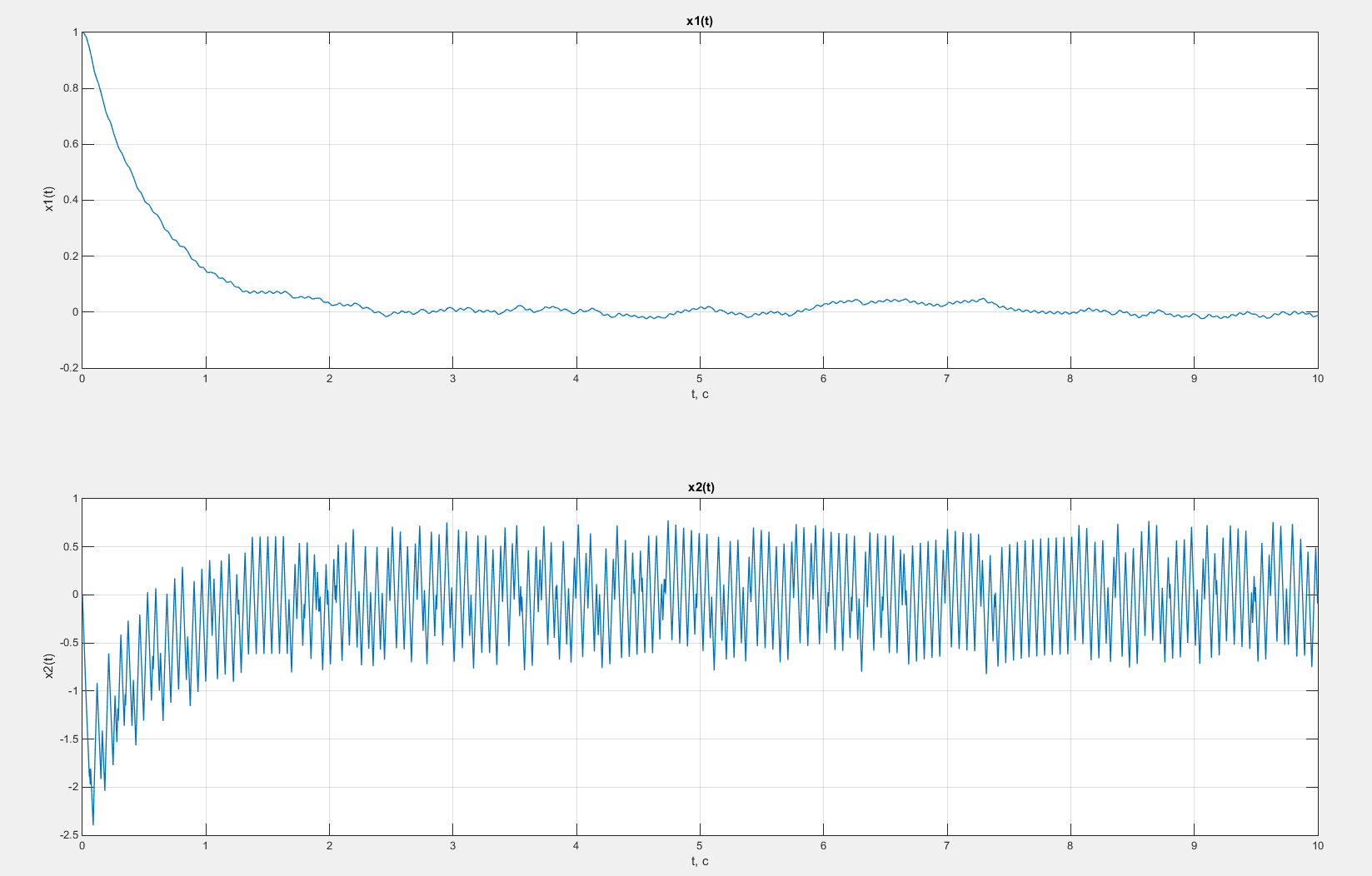
Рисунок 56 – Графики зависимостей x1(t) и x2(t) в случае введения коррекции по скорости с коэффициентом β = 0,5
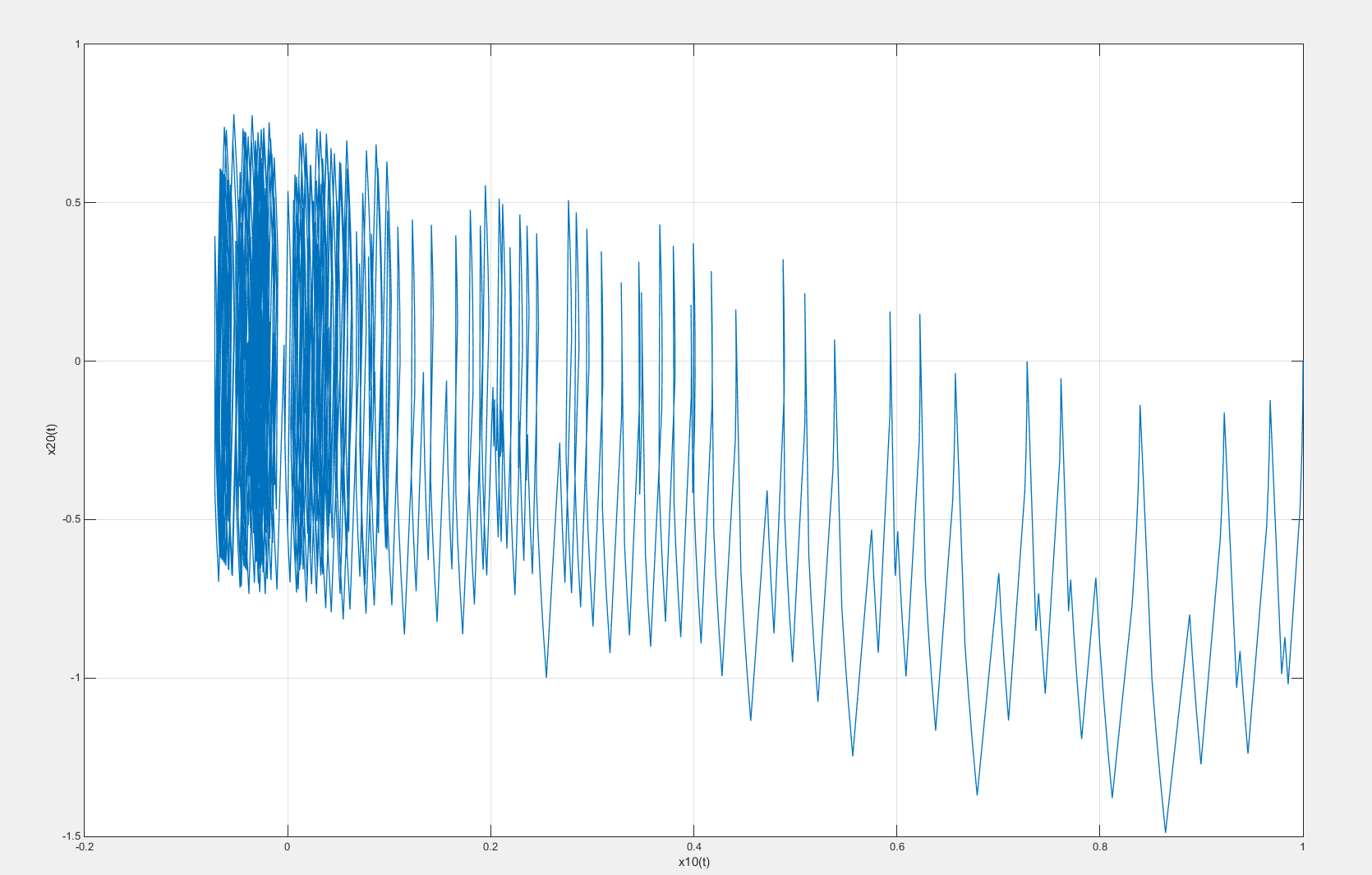
Рисунок 57 – Фазовый портрет системы с введенной коррекцией по скорости с коэффициентом β = 1
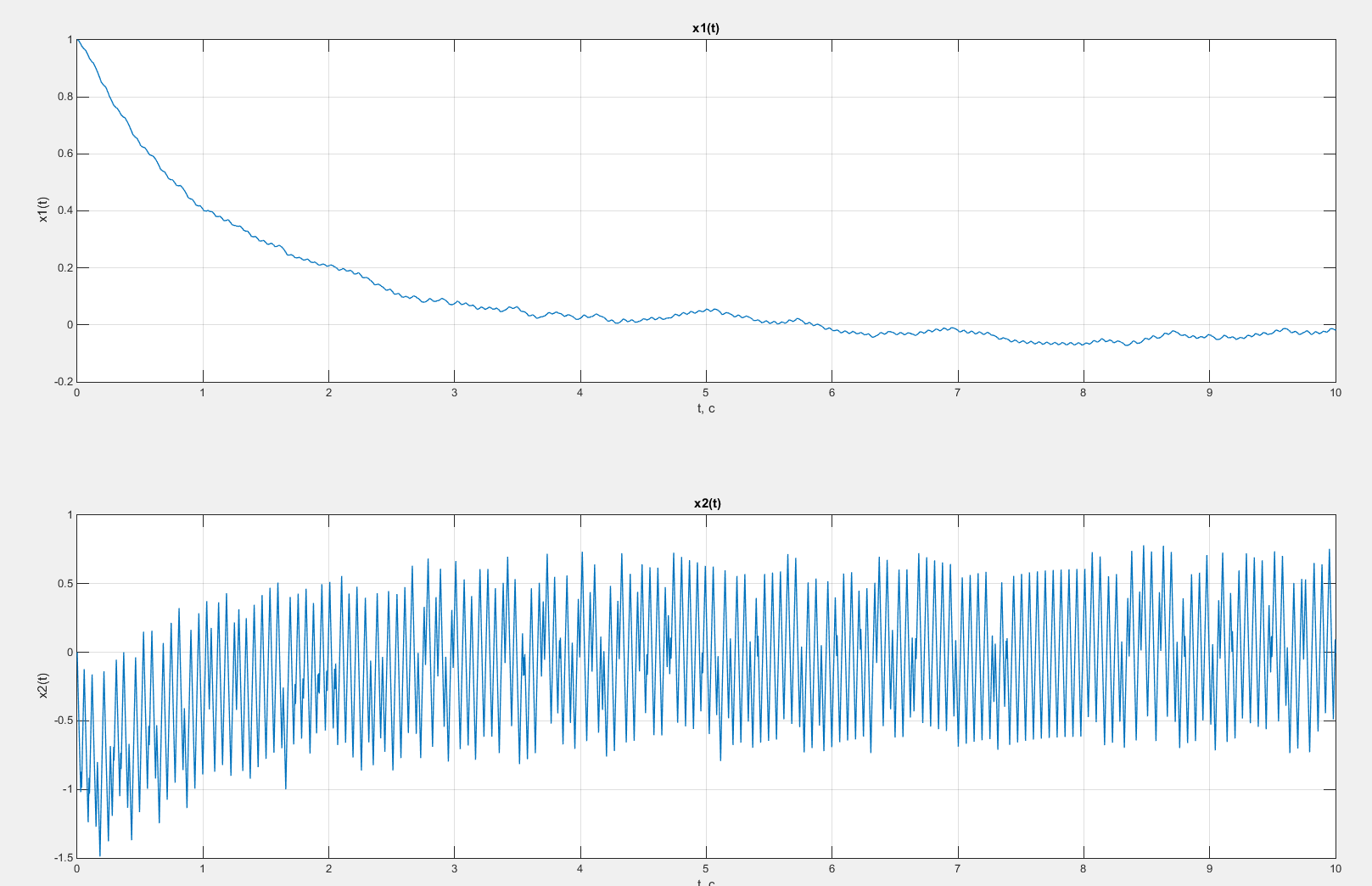
Рисунок 58 – Графики зависимостей x1(t) и x2(t) в случае введения коррекции по скорости с коэффициентом β = 1