

Лаба 1 / Лабораторная работа №1_Токарев_0421
.docx
МИНОБРНАУКИ РОССИИ
Санкт-Петербургский государственный
электротехнический университет
«ЛЭТИ» им. В.И. Ульянова (Ленина)
Кафедра РАПС
отчет
по лабораторной работе № 1
по дисциплине «Теория автоматического управления»
Тема: «Исследование ПИ- и ПИД-регуляторов»
Студент гр. 0421 |
|
Токарев А.А. |
Преподаватель |
|
Благодарный Н.С. |
Санкт-Петербург
2023
Цель работы
Исследование зависимости вида переходного процесса от параметров ПИ- и ПИД-регуляторов, сравнение переходных процессов при использовании ПИ- и ПИД-регуляторов.
Ход работы
Общие сведения
В качестве объекта управления будем рассматривать насос с асинхронным двигателем и преобразователем частоты. Упрощенно будем считать его последовательным соединением трех апериодических звеньев с постоянными времени ТЧП= 0,006, ТАД = 0,2, ТН = 1. Структурная схема объекта управления представлена на рисунке 1.

Рисунок 1 – Структурная схема объекта управления
В качестве задающего воздействия будем
рассматривать единичное ступенчатое
воздействие c временем
запаздывания в 1 секунду:
 .
.
Исследование ПИ-регулятора
Соберем ПИ-регулятор. Подготовим его к настройке, задав Ти = 1000, Кп = 1. Структурная схема регулятора изображена на рисунке 2.
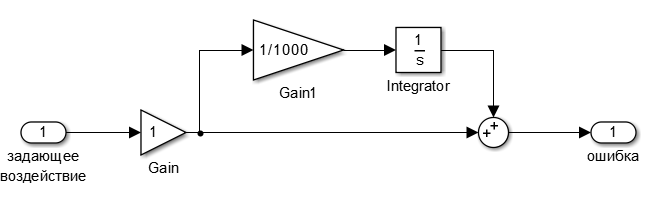
Рисунок 2 – Структурная схема ПИ-регулятора
Соберем нашу замкнутую систему управления, соединив последовательно ПИ-регулятор и объект управления и добавив отрицательную обратную связь. Структурная схема системы управления изображена на рисунке 3.

Рисунок 3 – Структурная схема замкнутой системы управления с ПИ-регулятором
Начнем настройку ПИ-регулятора. Для этого будем постепенно, небольшими итерациями, увеличивать значение Кп до тех пор, пока мы не добьемся переходного процесса с перерегулированием ~10%. Такое перерегулирование начинает наблюдаться при Кп = 7.5. График переходного процесса при Кп = 7.5, Ти = 1000 представлен на рисунке 4.

Рисунок 4 – График переходного процесса при Кп = 10, Ти = 1000
Как видно из графика, ошибка в установившемся режиме при таких параметрах ПИ-регулятора будет равна ≈10% от задающего воздействия.
Теперь, будем постепенно уменьшать Ти, пока не добьемся нулевой установившейся ошибки и переходного процесса с перерегулирование в ~10-20%. Если не удастся добиться таких показателей перерегулирования, то будем изменять Кп. Такое перерегулирование начинает наблюдаться при Ти = 1, Кп =3. График переходного процесса при Кп = 3, Ти = 1 представлен на рисунке 5.

Рисунок 5 – График переходного процесса при Кп = 3, Ти = 1
Как видно из графика, ошибка в установившемся режиме при таких параметрах ПИ-регулятора будет равна нулю, а перерегулирование составит ≈10% от задающего воздействия.
Исследуем, как повлияет увеличение коэффициента передачи регулятора на вид переходного процесса. Установим коэффициент передачи ПИ-регулятора Кп = 30. График переходного процесса представлен на рисунке 6.
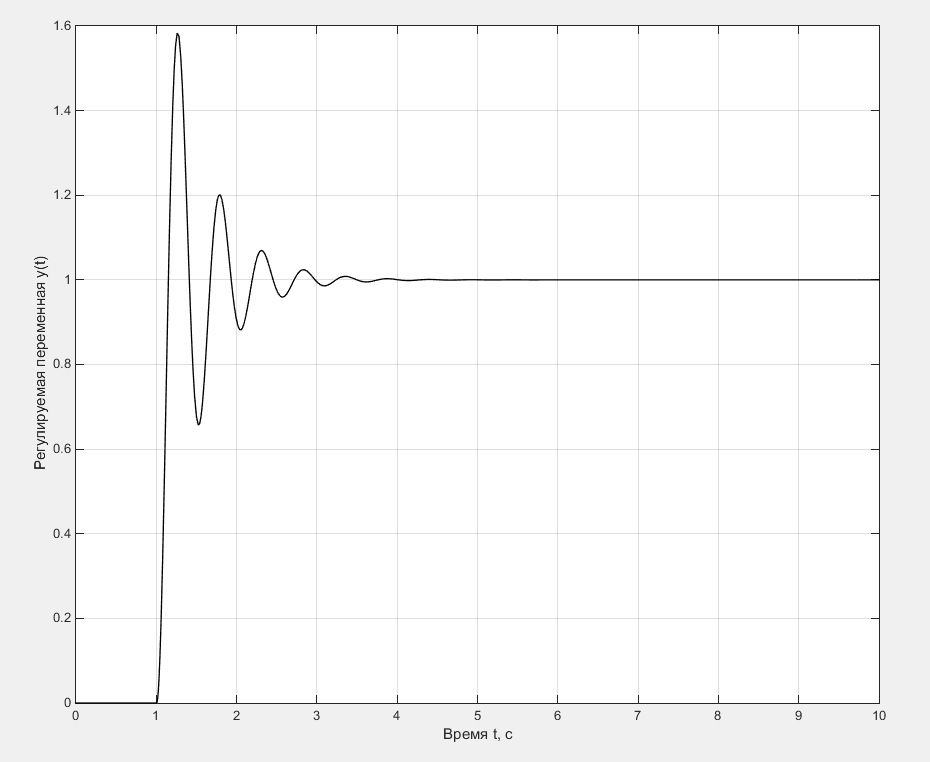
Рисунок 6 – График переходного процесса при Кп = 30, Ти = 1
Как можно видеть из графика, скорость достижения задающего воздействия стала выше, чем при Кп = 3, но увеличилась колебательность процесса.
Увеличим коэффициент передачи ПИ-регулятора Кп до 200. График переходного процесса представлен на рисунке 7.

Рисунок 7 – График переходного процесса при Кп = 200, Ти =1
Как видно из графика, с таким большим коэффициентом передачи регулятора система становится неустойчивой.
Исследование ПИД-регулятора
В качестве ПИД-регулятора будем использовать готовый блок PID(s) из библиотеки
Simulink. Окно настроек блока изображено на рисунке 8.

Рисунок 8 – Окно настроек блока PID(s)
Соберем нашу замкнутую систему управления, соединив последовательно ПИД-регулятор и объект управления и добавив отрицательную обратную связь. Также, для настройки Д-составляющей регулятора, выведем на тот же график переходный процесс при использовании ПИ-регулятора. Структурная схема системы управления представлена на рисунке 9.

Рисунок 9 – Структурная схема системы управления
Настроим регулятор вручную. Подберем параметры таким образом, чтобы перерегулирование было не более 10% от задающего воздействия, а быстродействие было лучше, чем у системы с ПИ-регулятором. Экспериментально установленные параметры ПИД-регулятора представлены на рисунке 10.

Рисунок 10 – Экспериментально установленные параметры ПИД-регулятора
Сравнение переходных процессов двух систем представлено на рисунке 11. Переходный процесс в системе с ПИД-регулятором обозначен штриховой линией, а переходный процесс в системе с ПИ-регулятором – сплошной линией.

Рисунок 11 – График переходных процессов в системе с ПИ- и с ПИД-регулятором
Воспользуемся функцией автоматической настройки регулятора. Для этого в настройках блока PID(s) необходимо выбрать пункт «Tune…». Окно настроек представлено на рисунке 12.

Рисунок 12 – Окно автоматической настройки ПИД-регулятора
Можно как улучшить быстродействие системы, так и понизить перерегулирование. После установки желаемых параметров системы с помощью ползунков вверху окна, в правом нижнем углу окна настроек высветятся необходимые параметры, которые нужно задать регулятору для достижения того или иного заданного качества управления.
Попробуем поменять настройки так, чтобы уменьшить перерегулирование. Применим параметры ПИД-регулятора, указанные на рисунке 13.
![]()
Рисунок 13 – Параметры ПИД-регулятора с уменьшенным перерегулированием
Построим график переходного процесса. График переходного процесса представлен на рисунке 14.

Рисунок 14 – График переходного процесса в системе с ПИД-регулятором при уменьшенном перерегулировании
Как видно из графика, при уменьшенном перерегулировании увеличилось время переходного процесса.
Вывод
В данной лабораторной работе были исследованы ПИ- и ПИД-регулятор в среде Simulink. Были построены графики переходных процессов при различных параметрах регуляторов, изучен принцип автоматической настройки ПИД-регулятора и ручной настройки ПИ-регулятора. Также было исследовано влияние увеличения коэффициента передачи регулятора на быстродействие и устойчивость системы управления и показано, что при увеличении коэффициента передачи выше определенного значения, система становится неустойчивой. Помимо этого было проведено сравнение переходных процессов ПИ- и ПИД-регуляторов и показано, что Д-составляющая регулятора увеличивает скорость протекания переходных процессов.