

Добавил:
ByeTPU
Опубликованный материал нарушает ваши авторские права? Сообщите нам.
Вуз:
Предмет:
Файл:LR9-10 АСП
.pdfРисунок 7 – АСР с П-регулятором
Рисунок 8 – АСР с ПИ-регулятором
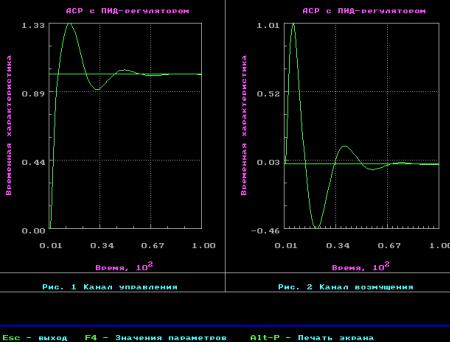
Рисунок 9 – АСР с ПИД-регулятором
Вывод: Метод Циглера-Никольса является более эффективным для расчёта параметров настройки систем автоматического регулирования,
более точный и эффективный чем оценка параметров настройки при помощи приближенных формул.
Так как у П-регулятора наибольшая статическая ошибка при Кр=1,01 по каналу управления 0,19, по каналу возмущения 0,4, использование его нецелесообразно.
УПИ и ПИД – регуляторов статическая ошибка минимальна и стремится
кнулю.
Время регулирования у ПИ и ПИД регуляторов практически совпадает,
динамическая ошибка у ПИ-регулятора значительно больше.
Рекомендуется использовать ПИД-регулятор.