

Вычисление главного вектора и главного момента системы сил п роизвольно расположенных на плоскости.
Воспользуемся методом проекций.
![]() ,
т.О - центр приведения
,
т.О - центр приведения
![]()
X, Y – проекции главного вектора на оси координат.
![]() ,
где Y1,Y2,Y3
и X1,X2,X3-проекции
сил
,
где Y1,Y2,Y3
и X1,X2,X3-проекции
сил
![]() на координатные
оси.
на координатные
оси.
Модуль и направление главного вектора определяются:
![]()
![]()
![]()
Все присоединенные пары сил лежат в одной плоскости.
![]()
– алгебраическая сумма моментов всех сил системы относительно центра приведения.
Уравнения равновесия системы сил, произвольно расположенной в плоскости.
Если главный вектор системы сил и главный момент относительно центра приведения равны нулю, то силы взаимно уравновешиваются.
![]()
Можно записать:
![]()
![]()
Основные уравнения равновесия плоской системы сил:
![]()
Существуют и две другие системы уравнений равновесия сил:
1)![]() .
Ось U
не должна быть перпендикулярно прямой,
проходящей через т.А и т.В.
.
Ось U
не должна быть перпендикулярно прямой,
проходящей через т.А и т.В.
2)
![]() .
т.А,В,С не должны лежать на одной прямой.
.
т.А,В,С не должны лежать на одной прямой.
У равнения равновесия параллельных сил.
Дана система
параллельных сил:
![]() .
Точки приложения: А1,А2…Аn.
.
Точки приложения: А1,А2…Аn.
Приведем силы к произвольному центру О. Получим и . Вычислим проекции на координатной оси.
![]()
![]() ,
,
т.к. X=0, то главный вектор направлен по оси OY
![]()
Главный вектор системы параллельных сил параллелен силам, его модуль равен абсолютному значению алгебраической суммы проекции сил на ось, параллельную силам, а его направление определяется знаком этой суммы.
![]()
![]()
Для системы параллельных сил на плоскости имеем 2 условия равновесия:
1)
![]() ;
;
![]() - основное уравнение равновесия
параллельных сил на плоскости (центр О
выбран произвольно).
- основное уравнение равновесия
параллельных сил на плоскости (центр О
выбран произвольно).
2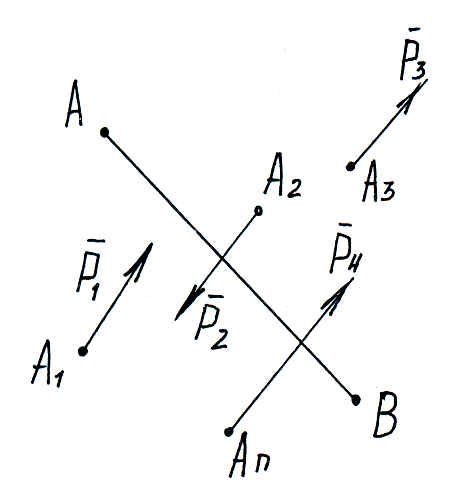 )
)
![]() ;
;
![]() - ограничение: прямая АВ не должна быть
параллельна силам.
- ограничение: прямая АВ не должна быть
параллельна силам.
«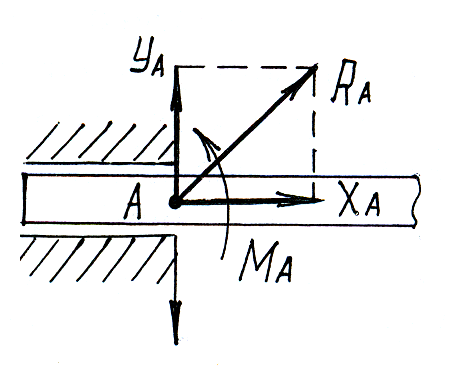 Глухая
заделка» («жесткая заделка»).
Глухая
заделка» («жесткая заделка»).
На заделанный
конец балки со стороны опорных плоскостей
действует система распределенных сил
реакций. Приводим их к центру А, заменив
неизвестной
![]() и
и
![]() .
Надо определить: XA,YA,MA.
.
Надо определить: XA,YA,MA.
Лекция 6.
Главный вектор и главный момент произвольной пространственной системы сил.
Знаем, что произвольная система сил может быть приведена к одной силе, равной главному вектору системы относительно центра приведения и приложенной в центре приведения и паре сил с моментом, равным главному моменту системы относительно центра приведения.
![]()
![]() X,Y,Z-проекции
главного вектора
X,Y,Z-проекции
главного вектора
![]()
![]() X1…Xn,
Y1…Yn,
Z1…Zn-проекции
сил на координатные оси
X1…Xn,
Y1…Yn,
Z1…Zn-проекции
сил на координатные оси
Модуль и направление главного вектора:
![]()
![]()
![]()
![]()
![]()
![]()
Модуль и направление главного момента.
![]()
![]()
![]()
![]()
Условие равновесия произвольной пространственной системы сил.
Необходимо и
достаточно, чтобы одновременно
![]() ,
,
![]() .
.
Но векторы и будут равны нулю, если будут равны нулю все проекции на оси координат, т.е.


Таким образом для равновесия произвольной пространственной системы сил необходимо и достаточно, чтобы суммы проекций всех сил на каждую из трех координатных осей и суммы их моментов относительно этих осей были равны нулю.
Первые три уравнения выражают необходимые условия того, чтобы тело не имело перемещений вдоль координатных осей, а последние три являются условием отсутствия вращения вокруг этих осей.