

Сложение пар сил.
Система пар, действующих на твердое тело, эквивалентна одной паре, момент которой равен геометрической сумме моментов этих пар.
Д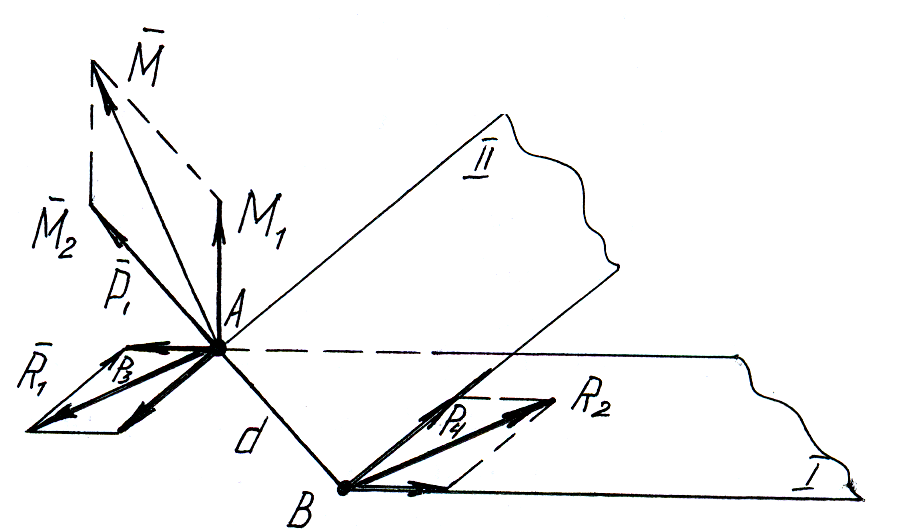 окажем
это для 3 пар. Даны 2 пары сил с моментами
окажем
это для 3 пар. Даны 2 пары сил с моментами
![]() и
и
![]() ,
лежащие в плоскостях I
и II.
,
лежащие в плоскостях I
и II.
АВ – прямая пересечения плоскостей I и II.
АВ=d
![]() момент
момент![]()
![]() момент
момент![]()
![]() .
.
![]()
![]() .
.
![]()
![]()
![]() пары
пары
![]() заменяются одной парой
заменяются одной парой
![]()
Найдем момент равнодействующий .
![]()
но
![]() а
а
![]()
![]()
Следовательно:
![]()
Если n
пар, то
![]()
Если же пары лежат водной плоскости, то эта система пар эквивалентна паре, лежащей в той же плоскости и момент её равен алгебраической сумме моментов этих пар.
Условия равновесия пар сил.
Для равновесия пар сил, действующих на твёрдое тело необходимо и достаточно, чтобы модуль вектора момента эквивалентной пары сил равнялся нулю.
![]() ,
отсюда:
,
отсюда:
![]() -
0
-
0
![]()
![]()
Необходимо и достаточно, чтобы алгебраическая сумма проекции векторов моментов пар сил на каждую из 3-х координатных осей была равна нулю.
Лекция 5.
Теорема о II переносе силы. (Метод Пуансо)
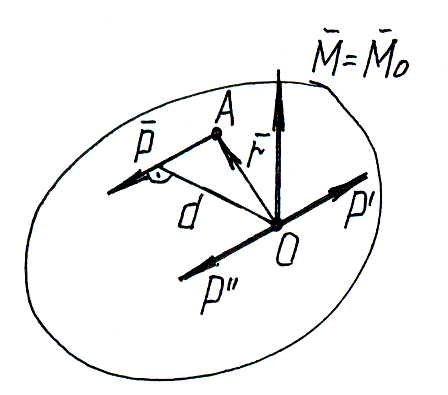
т.О центр приведения
![]()
в т.О 2 уравновешивающие силы и
![]()
![]()
![]() ,т.
к.
,т.
к.
![]() 0.
0.
![]() можно рассматривать
как совокупность
и
пары
можно рассматривать
как совокупность
и
пары![]() .
.
Момент пары
![]() .
.
Совпадает не только
модуль, но и направление момента силы
относительно т.О![]() и
момента пары
и
момента пары![]() .
.
Момент пары как свободный вектор может быть приложен в любой точки плоскости приложим его в т.О.
![]()
Т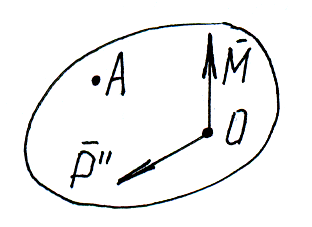 аким
образом, силу
,
не изменяя её действия на твёрдое тело
можно перенести из точки её приложения
А в любой центр приведения О, приложив
при этом к телу пару сил с моментом
,
геометрически равным моменту
этой силы относительно центра приведения.
аким
образом, силу
,
не изменяя её действия на твёрдое тело
можно перенести из точки её приложения
А в любой центр приведения О, приложив
при этом к телу пару сил с моментом
,
геометрически равным моменту
этой силы относительно центра приведения.
(Метод Пуансо (1777 -1850 г.г.)
Приведение произвольной системы сил к заданному центру; главный вектор, главный момент.

![]() произвольно
расположенные силы
произвольно
расположенные силы
т. приложения
![]() .
.
Приведём их к произвольному центру О.
Получим:
1). 3 силы
![]() приложены в т.О;
приложены в т.О;
2). 3 приложенные пары
![]() .
.
Складывая
![]() по правилу многоугольника, получим их
равнодействующую
по правилу многоугольника, получим их
равнодействующую
![]() ,
равную их геометрической сумме.
,
равную их геометрической сумме.
![]()
Геометрическая
сумма всех сил системы называется
главным
вектором системы сил
![]() .
.
Складывая пары
![]() получим
эквивалентную им пару. Момент каждой
присоединенной пары сил равен моменту
соответствующей силы относительно
центра приведения О.
получим
эквивалентную им пару. Момент каждой
присоединенной пары сил равен моменту
соответствующей силы относительно
центра приведения О.
![]()
Момент эквивалентной пары равен геометрической сумме моментов присоединенных пар.
![]()
Момент![]() ,
равный геометрической сумме моментов
сил данной системы относительно
какой-либо точки, называется главным
моментом системы сил относительно этой
точки.
,
равный геометрической сумме моментов
сил данной системы относительно
какой-либо точки, называется главным
моментом системы сил относительно этой
точки.
Распространяем полученные результаты на любое число сил:
![]()
Силы, произвольно расположенные в пространстве, можно привести к одной силе, равной их главному вектору, и приложенной в центре приведения, и к паре сил, с моментом, равным главному моменту всех сил относительно центра приведения.
Выбор центра
приведения не отражается на
![]() ,
но влияет на модуль и направление
главного момента.
,
но влияет на модуль и направление
главного момента.