

Аналитический способ сложения сходящейся системы сил
Для аналитического задания силы необходимо выбрать систему координационных осей, по отношению к которым будет определяться направление силы в пространстве.
Вектор, изображающий силу, можно построить, если известны её проекции на прямоугольные декартовы оси координат.

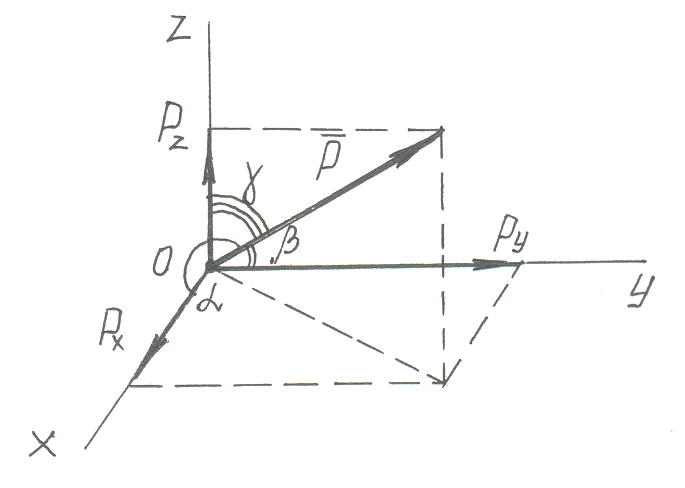
Сила
разложена на составляющие
![]() ,
которые численно равны проекциям силы
на соответствующие оси. Отсюда следует,
что если известны проекции силы на оси
координат, то можно вектор силы построить
геометрически.
,
которые численно равны проекциям силы
на соответствующие оси. Отсюда следует,
что если известны проекции силы на оси
координат, то можно вектор силы построить
геометрически.
![]()
![]() ,
,
где
![]()
Чтобы сложить силы аналитически, необходимо вычислить проекции сил на координатные оси.
Аналитическое условие равновесия сходящейся системы сил.
![]() ,
т.е. и
,
т.е. и
![]() ,
тогда
,
тогда
-аналитическое выражение равновесия пространственной сходящейся системы сил.
 -
для плоской системы
сил
-
для плоской системы
сил
Для равновесия сходящейся системы сил необходимо и достаточно, чтобы суммы проекций всех сил на три взаимноперпендикулярных оси были равны 0.
Лекция 3.
М омент силы относительно точки.
Дано:
тело с неподвижной т.О, в т.А приложена
сила
,
которая стремится повернуть тело вокруг
т.О. Такое действие силы называется
вращательным
эффектом.
Вращательный эффект изменяется моментом
силы относительно точки:
![]() .
.
Момент силы
относительно т.О изображается вектором
![]() приложенным в этой точке и направленным
перпендикулярно к плоскости, содержащей
силу и точку, в такую сторону, чтобы,
смотря навстречу этому вектору, видеть
силу
,
стремящуюся вращать эту плоскость в
сторону, обратную вращению часовой
стрелки.
приложенным в этой точке и направленным
перпендикулярно к плоскости, содержащей
силу и точку, в такую сторону, чтобы,
смотря навстречу этому вектору, видеть
силу
,
стремящуюся вращать эту плоскость в
сторону, обратную вращению часовой
стрелки.
Модуль этого
вектора:
![]() ,
,
где d – плечо - кратчайшее расстояние от т.О до линии действия силы.
Модуль можно
выразить
![]()
Момент силы равен, нулю если d=0
Если в т.А провести
![]() ,
то
,
то
![]()
![]() ,
но
,
но
![]()
Вектор момента силы относительно т.О можно рассматривать как векторное произведение , проведенного из этой точки в точку приложения силы на вектор силы .
Момент силы относительно оси.
П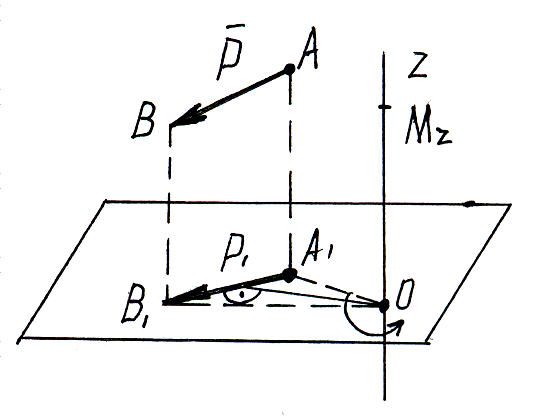 усть
на твердое тело в т.А действует
.
Чтобы вычислить момент этой силы
относительно оси Z,
следует спроектировать
на плоскость, перпендикулярную к оси
Z,
а затем вычислить момент ее проекции
на эту плоскость относительно т.О
пересечения оси с плоскостью, приписав
этому моменту знак «+» или «–».
усть
на твердое тело в т.А действует
.
Чтобы вычислить момент этой силы
относительно оси Z,
следует спроектировать
на плоскость, перпендикулярную к оси
Z,
а затем вычислить момент ее проекции
на эту плоскость относительно т.О
пересечения оси с плоскостью, приписав
этому моменту знак «+» или «–».
Моментом силы
относительно оси Z
называется взятое со знаком «+» или «–»
произведение модуля проекции
![]() силы
на плоскость перпендикулярную оси, на
ее плечо d1
относительно т.О1
пересечения
оси с плоскостью.
силы
на плоскость перпендикулярную оси, на
ее плечо d1
относительно т.О1
пересечения
оси с плоскостью.
![]()
Момент
![]() «+», если смотря навстречу оси Z,
можно видеть
стремящейся вращать плоскость вокруг
оси z
против часов стрелки.
«+», если смотря навстречу оси Z,
можно видеть
стремящейся вращать плоскость вокруг
оси z
против часов стрелки.
Момент изображается отрезком, отложенным по оси Z от т.О., в положительном направлении, если >0 и в отрицательном, если <0.
![]()
момент силы относительно оси равен 0, если:
1)линия действия силы параллельна оси
2)линия действия силы пересекает ось
отсюда следует: если сила и ось лежат в одной плоскости, то момент силы относительно этой оси равен 0.
Зависимость между моментами силы относительно точки и оси, проходящей через эту точку.
Мы установили, что
,
т.к.
![]() является проекцией
является проекцией
![]() на плоскость,
перпендикулярную оси Z,
то
на плоскость,
перпендикулярную оси Z,
то
![]() ,
где
,
где
![]() -угол
между плоскостями.
-угол
между плоскостями.
Известно, что угол между плоскостями равен углу между перпендикулярами, проведенными к этим плоскостям, т.е. углу между и осью Z.
Следовательно,
![]()
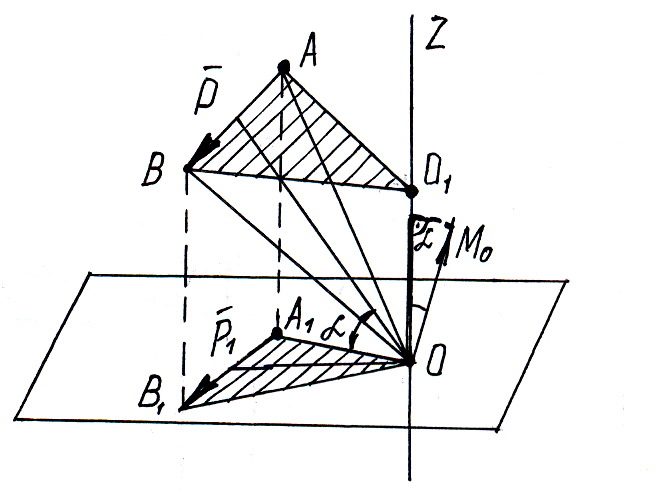
Проекция момента силы относительно точки на ось, проходящую через эту точку , равна моменту силы относительно этой оси. Если сила расположена в плоскости, перпендикулярной оси, то
![]()
![]()