

samoilov_n_a_modelirovanie_v_himicheskoi_tehnol
.pdf121
В качестве примера использования метода неопределенных множителей Лагранжа рассмотрим расчет оптимальных размеров слоя
катализатора |
в |
реакторе |
термокаталитической |
очистки |
отходящих газов от примесей углеводородов [19]. |
|
|||
Очистка горячих отходящих газов от примесей углеводородов выполняется в реакторе с насыпным слоем катализатора, обеспечивающим окисление углеводородов до диоксида углерода и воды:
Cn H m O2 ...nCO2 0.5mH 2 O
катализатор ,
где n и m – соответственно число атомов углерода (С) и водорода (Н) в углеводороде.
Размеры слоя катализатора (высота слоя Н и диаметр слоя D ) в контактном узле реактора зависят от необходимой степени очистки газа от
примесей х0 и заданного расхода очищаемого газа Q и ограничиваются допустимой величиной перепада давления P газа в реакторе, поскольку, как правило, отработавший газ, поступающий на очистку и затем сбрасываемый в атмосферу, имеет незначительное избыточное давление.
Размеры слоя катализатора будем определять исходя из минимизации критерия оптимальности R как суммы капитальных (ЗК) и эксплуатационных (ЗЭ) затрат на осуществление термокаталитической очистки в контактном узле на основе известных кинетических данных по реализации процесса при заданной температуре окисления t , тогда целевая функция имеет вид
R ЗК + ЗЭ = min . |
(5.13) |
Капитальные затраты ЗК учитываются в форме амортизационных отчислений через приведенные капитальные затраты на изготовление контактного узла и загруженный катализатор:
|
cK |
D |
|
ЗК = KY |
|
||
, |
(5.14) |
||
где сК – суммарные приведенные капитальные затраты на изготовление контактного узла и стоимость загруженного в него катализатора, отнесенные к одному погонному метру периметра катализаторного слоя диаметром D , руб./м;
122
KY – плановый срок службы контактного узла, годы (срок службы катализатора с учетом его регенерации приравнен к сроку службы металлоконструкций контактного узла).
Эксплуатационные затраты ЗЭ определяются стоимостью компенсации потерь напора в слое катализатора:
ЗЭ =cП Q P HW , |
(5.15) |
где сП – условная стоимость перекачки 1 м3 неочищенного газа при перепаде давления 1 н/м2, руб./(м*н);
Q – усредненный годовой планируемый расход неочищенного газа, м3/год;
Н – толщина слоя катализатора, м;
W – скорость потока очищаемого газа в расчете на нормальное сечение катализаторного узла, м/с;
P P /(HW ) – перепад давления в слое катализатора высотой 1 м при скорости потока 1 м/с, н*с/м4.
Допуская относительно низкую скорость газа в слое катализатора,
величину P находим по первому слагаемому уравнения Эргуна:
P |
|
150 |
(1 )2 |
|
|
|
|
3 d 2 |
, |
(5.16) |
|||
|
|
|
||||
где – порозность слоя катализатора;
– динамическая вязкость газа при температуре процесса, Па*с.
Сучетом уравнений (5.14) – (5.15) целевая функция примет вид
R |
cK |
D + cП Q P HW = min . |
(5.17) |
|
|||
KY |
|
|
|
На процесс термокаталитической очистки газов необходимо в соответствии с постановкой задачи наложить как минимум два ограничения:
–реактор должен обеспечивать очистку заданного расхода газа Q (удобнее в данном случае рассматривать не годовой расход газа Q , а секундный расход газа Q );
–в реакторе должна достигаться заданная степень очистки газа х0.
Функции ограничения, включающие параметры ограничения и параметры оптимизации размеров слоя D и Н, имеют в общем случае вид
|
123 |
|
|
f1 |
f (x0 , H, D) 0 |
(5.18) |
|
и |
|
|
|
f2 |
(5.19) |
||
f (Q , H, D) 0 |
и включают оба параметра оптимизации или один из них.
Функцию ограничения f1 можно разработать на основе математической модели, описывающей катализаторный (контактный) узел реактора, если рассмотреть упрощенно реакцию окисления углеводородов
K
при избытке кислорода как A B , где А – окисляемые примеси, В – продукты реакции, К – константа скорости реакции. Порядок реакции можно принять как первый.
Гидродинамику контактного узла можно принять эквивалентной модели идеального вытеснения, поскольку при малом времени контакта (менее секунды) диффузионными явлениям при переносе реакционной смеси через слой катализатора можно пренебречь.
Математическая модель контактного узла реактора по окисляемым углеводородам для стационарных условий процесса будет иметь вид
dC |
KC W |
dC |
0 |
(5.20) |
|
d |
dH |
||||
|
, |
где С – концентрация углеводородов в реакционной зоне. После интегрирования уравнения (5.20)
CK dC |
H |
|
|
|
K |
|
|
|
|
|
|
|||||
C0 |
|
|
|
0 |
|
|
|
|
|
dH , |
|
|
||||
|
C |
|
W |
|
(5.21) |
|||||||||||
где С0 – начальная концентрация углеводородов в очищаемом газе; |
|
|||||||||||||||
СК – конечная концентрация углеводородов после очистки, |
|
|||||||||||||||
получим |
|
|
|
|
K |
|
|
|
|
|
|
|
|
|
|
|
CK |
C0 |
exp( |
H ) |
|
|
|
|
|
(5.22) |
|||||||
|
|
|
|
|
|
|||||||||||
или |
|
|
|
W |
|
|
|
|
|
|||||||
|
C K |
|
|
|
|
|
|
K |
|
|
|
|
|
|
||
x0 (1 |
|
) 1 exp( |
H ) |
|
|
|||||||||||
|
C0 |
|
|
|
(5.23) |
|||||||||||
|
|
|
|
|
|
|
W |
, |
|
|||||||
тогда первая функция ограничения может быть записана в форме |
|
|||||||||||||||
f1 f (x0 , H ) x0 (1 exp( |
K |
H )) |
=0 , |
(5.24) |
||||||||||||
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
W |
|||||

124
обеспечивающей достижение заданной степени очистки газа х0. Вторая функция ограничения формируется как
f2 |
|
|
D2 |
W 0 |
, |
(5.25) |
||
|
|
|||||||
f (Q , D) Q |
. |
|
||||||
|
|
|
4 |
|
|
|||
обеспечивая заданную производительность реактораQ
Сформируем функцию Лагранжа L :
2
LR( H ,D ) i fi =
i1
|
|
|
|
|
|
|
cK |
|
D |
+ c |
|
|
|
|
HW |
|
|
|
|
|
|
|
K |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
= |
|
|
|
|
|
|
|
+ |
1 |
[ x0 (1 exp( |
H )) ]+ |
|
||||||||||||||||||
|
|
|
|
KY |
|
|
|
|
|
П Q P |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ 2 [Q |
D2 |
W |
]= min |
, |
|
|
(5.26) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
||||
где 1 и |
|
2 |
неопределенные множители Лагранжа |
|
|
|||||||||||||||||||||||||||||
|
Решение задачи ищем поиском экстремума (3.28) по всем |
|||||||||||||||||||||||||||||||||
переменным: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
dL |
|
|
|
|
c |
K |
|
|
|
|
|
2 |
D |
2 |
|
W 0 |
|
|
|
|
|
|
|||||||||||
|
dD |
|
KY |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
dL |
|
c П Q P W |
|
|
K |
1 exp( |
|
K |
H ) 0 |
|
|
||||||||||||||||||||||
|
dH |
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
|
|
|
|
W |
|
|
|
|
|||||||||||
|
dL |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
|
|
|
|
|
|
|
|
. |
(5.27) |
||||
|
|
|
|
|
|
|
x 0 |
|
1 exp( |
|
|
H |
|
) |
0 |
|
|
|||||||||||||||||
|
d 1 |
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
|
|
|
|
|
|
|
|
|
|
|||||||
|
dL |
|
Q |
|
D |
2 |
W 0 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
d 2 |
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Система нелинейных уравнений (5.27) может быть решена на ЭВМ методом итераций с определением оптимальных значений диаметра D и высоты слоя катализатора Н в реакторе, остальные размеры аппарата определяются конструктивно.
5.3. Методы нелинейного программирования
Методы нелинейного программирования представляют собой группу задач оптимизации, решаемых путем последовательного улучшения критерия оптимальности при многошаговом исследовании области
125
оптимизации численными методами при помощи определенных алгоритмов. При этом, если при выполнении шага критерий оптимальности улучшается (например, увеличивается, если критерий оптимальности должен стремиться к максимуму), то критерий и его координаты заносят в ячейку памяти компьютера, если критерий оптимальности ухудшается, то его не запоминают. В итоге, после исследования области оптимизации в памяти компьютера остается наилучшее значение критерия оптимальности и оптимальные значения параметров процесса. Методы нелинейного программирования различаются по скорости решения задачи и сложности программы расчета. К каждой конкретной задаче оптимизации можно подобрать наиболее рациональный метод решения задачи.
Методы нелинейного программирования можно разбить на три класса:
градиентные методы, в которых величина шага определяется величиной производной от целевой функции по параметрам процесса; к этой группе методов относят метод градиента, метод наискорейшего спуска, метод крутого восхождения, метод двух производных и др.
безградиентные методы, в которых величина шага обычно изменяется в соответствии с алгоритмом метода и рассчитывается по простым алгебраическим выражениям, к этой группе методов относят метод сканирования, метод золотого сечения, метод чисел Фибоначчи и др.
методы случайного поиска, в которых величина шага находится по таблицам случайных чисел.
Наиболее часто применяют две первые группы методов оптимизации, причем градиентные методы обычно используют, когда величина производной от целевой функции рассчитывается достаточно просто и быстро, а безградиентные – когда проще и быстрее можно рассчитать целевую функцию.
Быстродействие решения задачи оптимизации является доминантным признаком для методов нелинейного программирования, поскольку приходится при поиске оптимального решения выполнять огромный объем расчетов. Ниже рассмотрены некоторые несложные методы оптимизации на примере решения однопараметрических задач вида R( X ) =МАХ (МIN), c заданным диапазоном области исследования
задачи на экстремум X MIN |
X X MAX и заданной погрешности |
определения точки экстремума |
X . |
Безградиентные методы нелинейного программирования
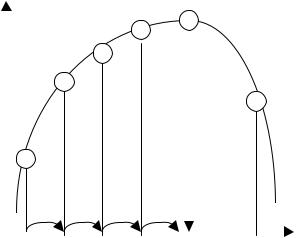
Простейшим из безградиентных методов является метод сканирования (рис 5.3). Алгоритм расчета при исходных данных (
|
|
|
|
|
|
|
|
126 |
|
|
|
|
|
|
|
|
целевая |
функция |
– |
R( X ) =МАХ |
, |
область |
исследования |
– |
|||||||||
X MIN |
X X MAX , |
погрешность |
определения точки |
экстремума – X ) |
||||||||||||
заключается в сканировании (прохождении) |
оси Х в интервале от X MIN до |
|||||||||||||||
X MAX |
с |
шагами |
X |
и расчетом значения критерия |
R |
по |
целевой |
|||||||||
функцииR R( X ) с запоминанием лучшего результата оптимизации. |
|
|||||||||||||||
R |
|
|
|
|
|
|
RMAX |
Реализация алгоритма следующая: |
||||||||
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
1. |
Вычисляется величина |
R в |
||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
точке X MIN . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. |
Выполняется |
переход |
из |
|||
|
|
|
|
|
|
|
|
|
|
точки X MIN |
в точку Х1 |
с шагом |
||||
|
|
|
|
|
|
|
|
|
|
X . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3. |
Вычисляется новое значение |
|||||
|
|
|
|
|
|
|
|
|
|
R1 в точке Х1. |
|
R , |
|
|
||
|
|
|
|
X X X |
|
|
|
|
4. |
Если R1 |
больше |
то шаг |
||||
|
|
|
|
|
|
|
|
|
|
выполнен |
удачно, |
в |
память |
|||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
X MIN Х1 Х2 |
Х3 |
X OПП |
X MAX |
Х заносятся R1 и |
Х1 |
как |
R ОПТ , |
||||||
|
|
|
Рис. 5.3. Иллюстрация метода |
ХОПТ. |
|
|
|
|
|
|||||||
|
|
|
5. |
Продолжается сканирование |
||||||||||||
|
|
|
|
сканирования |
|
|
оси Х по пунктам 2-4 алгоритма |
|||||||||
|
|
|
|
|
|
|
|
|
|
до достижения Х= X MAX . |
|
|||||
|
|
|
В рассмотренном |
алгоритме в памяти содержится характеристика |
||||||||||||
глобального экстремума целевой функции (рис.5.1). Если целевая функция содержит один экстремум, то в пункте 5 алгоритма вводится условие прекращения сканирования и, соответственно, решения задачи в виде: если R1 R ОПТ , то расчет прекращают.
Метод сканирования – это единственный из методов нелинейного программирования, позволяющий рассчитать глобальный экстремум. Недостатком метода является длительность решения задачи в связи с необходимостью выполнения большого числа циклов расчета n :
n ( X MAX X MIN ) / X , (5.28)
так, например, если Х – это температура процесса, исследуемая в интервале 100-400 0С с шагом 0.5 0С, то для решения задачи будет необходимо выполнить 600 циклов расчета.
Намного эффективнее метода сканирования при наличии единственного экстремума методы локализации экстремума, в частности, метод чисел Фибоначчи . В этом методе шаги в области исследования по
|
|
|
|
|
127 |
|
|
|
|
|
|
оси выполняются |
пропорционально числам Фибоначчи (табл. 5.1), |
||||||||||
которые рассчитываются по рекуррентному соотношению |
|
|
|||||||||
|
FK FK 1 FK 2 ; |
F0 F1 |
1. |
|
(5.29) |
||||||
Как следует из табл. 5.1, числа Фибоначчи резко возрастают с |
|||||||||||
увеличением их порядкового номера. |
|
|
|
Таблица 5.1 |
|||||||
|
|
|
Числа Фибоначчи |
|
|||||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
Порядковый номер к |
|
1 |
|
2 |
|
3 |
|
4 |
5 |
6 |
7 |
Числа ФибоначчиFK |
|
1 |
|
2 |
|
3 |
|
5 |
8 |
13 |
21 |
Порядковый номер к |
|
8 |
|
9 |
|
10 |
|
11 |
12 |
13 |
14 |
Числа ФибоначчиFK |
|
34 |
|
55 |
|
69 |
|
144 |
233 |
377 |
610 |
Порядковый номер к |
|
15 |
|
16 |
|
17 |
|
18 |
19 |
20 |
21 |
Числа ФибоначчиFK |
|
987 |
|
1597 |
|
2584 |
|
4181 |
6765 |
10946 |
17711 |
Если заданы целевая функция R( X ) =МАХ , область исследования X MIN X X MAX и погрешность определения точки экстремума – X , то методом чисел Фибоначчи необходимо выполнить к циклов расчета, где к
– порядковый номер ближайшего числа Фибоначчи, большего числа циклов при решении задачи методом сканирования:
F K n ( X MAX X MIN ) / X . (5.30)
Так, например, если в примере, приведенном на стр. 126 число циклов расчета методом сканирования составляло 600 , то при ближайшем большем числе Фибоначчи 610 (табл. 5.1) рассматриваемым методом придется выполнить лишь 14 циклов расчета.
Алгоритм расчета включает следующие этапы: 1. Определяется минимальный шаг поиска экстремума
|
m ( X MAX X MIN |
) / Fk , |
(5.31) |
|||
очевидно, что m X , если |
F K |
n , |
и |
m X , если |
||
F K n . |
|
|
|
|
|
|
2. |
Вычисляется величина R в точке X MIN . |
|
|
|
||
3. |
Выполняется переход из точки X MIN |
в точку Х1 |
с координатой |
|||
|
X 1 X MIN |
|
m Fk 2 |
(5.32) |
||
128
и в этой точке рассчитывается величина критерияR( X 1 ) .
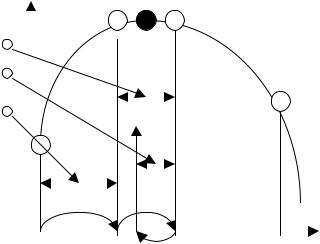
4. Если шаг оказался удачным ( R1 больше R ), т следующий шаг выполняется в том же направлении, что и предыдущий, но с последовательным уменьшением числа Фибоначчи на каждом шаге. На рис. 5.4 первый шаг – удачен и выполнен переход в точку
X 2 X 1 m Fk 3 . |
(5.33) |
Если шаг оказался неудачным, то меняется направление движения к экстремуму и переходим последовательно в новые точки, каждый раз уменьшая число Фибоначчи. На рис. 5.4 второй шаг оказался неудачным и координаты очередной третьей точки нашли как
|
X 3 |
X 2 |
m Fk 4 . |
(5.34) |
||||
R |
|
|
RMAX |
|
||||
m Fk 3 |
|
|
|
|
|
|
|
|
m Fk 4 |
|
|
|
|
|
|
|
|
m Fk 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X MIN |
Х1 Х3 Х2 |
X MAX Х |
Рис. 5.4. Иллюстрация метода чисел Фибоначчи
Процесс пошагового расчета выполняется до тех пор, пока не будут исчерпаны все числа Фибоначчи в убывающей последовательности, при
этом последнее число Фибоначчи F0 обеспечивает шаг
m F0 |
m X , |
(5.35) |
то есть оно определяет координаты экстремума с заданной степенью точности или выше ее.
129
Градиентные методы нелинейного программирования
Из большого числа градиентных методов остановимся на методе двух производных, являющимся одним из наиболее быстродействующих методов нелинейного программирования. В этом методе переход из одной точки сканирования оси Х в другую выполняется с шагами, равными
инкременту IX , то есть отношению первой и второй производных от целевой функции, без расчета критерия оптимальности на каждом шаге;
I X |
|
|
R( X ) / X |
|
|
||
2 R( X ) / X 2 . |
(5.36) |
||||||
|
|
||||||
Переход из предыдущей точки |
X i в последующую точку X i 1 |
||||||
выполняется по формуле |
X i 1 |
X i |
I X . |
|
|||
|
(5.37) |
||||||
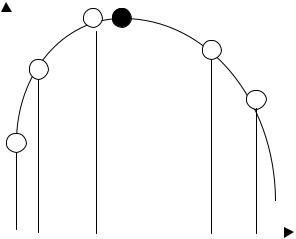
Метод основан на специфических свойствах инкремента. Рассмотрим качественно характер инкремента в при различных значениях
параметра Х (рис. 5.5), |
если |
заданы целевая |
функция R( X ) =МАХ , |
||
область исследования |
X MIN |
X X MAX и |
погрешность определения |
||
точки экстремума X . |
|
|
|
|
|
R |
3 |
RMAX |
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
X MIN Х1 |
Х3 |
|
Х2 |
X MAX |
Х |
|
Рис. 5.5. Иллюстрация метода двух производных |
||||||
Анализ первой |
точки |
показывает, |
что |
при Х=Х1 производная |
||
R( X ) / X является положительной величиной, а вторая производная |
||||||
2 R( X ) / X 2 – |
отрицательной, |
тогда |
величина |
инкремента I X |
||
является положительной и |
от точки |
Х1 |
мы |
переместимся вправо в |
||
130
направлении к экстремуму в новую расчетную точку. Во второй точке при Х=Х2 производная R( X ) / X является отрицательной величиной, и
вторая производная 2 R( X ) / X 2 – отрицательна, тогда величина
инкремента I X станет отрицательной и от точки Х2 мы переместимся влево в направлении к экстремуму в новую расчетную точку. Сопоставляя поведение расчета в точках 1 и 3, нетрудно заметить, что в обоих случаях
инкременты положительны, но I X 3 будет существенно меньше таким образом, чем ближе находится расчетная точка к экстремуму, тем меньше величина очередного шага, при попадании в ходе решения задачи
точно в точку экстремума получаем величину I X 0 . Таким образом метод самостоятельно перемещает точку поиска экстремума в
околоэкстремальную область |
без расчета критерия оптимальности, что |
|||
существенно ускоряет расчет задачи оптимизации. |
|
|||
|
Алгоритм решения предельно прост: |
|
||
1. |
В области |
исследования задачи X MIN X X MAX |
выбираем |
|
произвольную точку Х и рассчитываем для нее величину инкремента I X . |
||||
2. |
Переходим в |
новую точку |
расчета X i с шагом, равным |
величине |
инкремента I X .
3. Расчет по пункту 2 выполняем до тех пор, пока величина I X не станет меньше погрешности расчета X и по последнему значению параметра Х рассчитывается значение критерия оптимальности R .
Особенности поиска оптимальных условий ведения процесса для многофакторных задач
При оптимизации многофакторных задач часто используют метод Гаусса-Зейделя – метод последовательного поиска локальных оптимальных значений переменных и локальных экстремумов (закрепляя все факторы, кроме одного, как константы, и варьируя решение задачи по единственному переменному параметру. Среди локальных экстремумов затем находят глобальный экстремум. Для наглядности рассмотрим работу метода при оптимизации двухпараметрической задачи, для которой
заданы |
целевая функция |
R( X1 , X 2 )=МАХ , |
область исследования |
X MIN ,i |
X i X MAX ,i и погрешность определения |
точки экстремума X i |
|
для каждого из параметров.
Алгоритм метода иллюстрируется рис. 5.6 и состоит из трех элементов: