лабы / метра6
.docxМИНОБРНАУКИ РОССИИ
Санкт-Петербургский государственный
электротехнический университет
«ЛЭТИ» им. В.И. Ульянова (Ленина)
Кафедра ИИСТ
отчет
по лабораторной работе №6
по дисциплине «Метрология и измерительная техника»
Тема: «Динамический режим средств измерений»
Студенты гр. 358 |
|
. |
|
|
. |
Преподаватель |
|
Гелета А.А. |
Санкт-Петербург
2025
Обработка результатов измерений
1.Построение графиков входного и выходного сигналов
По данным, полученным в ходе проведения
лабораторной работы, построим графики
входного и выходного сигналов при
постоянных
 .
.
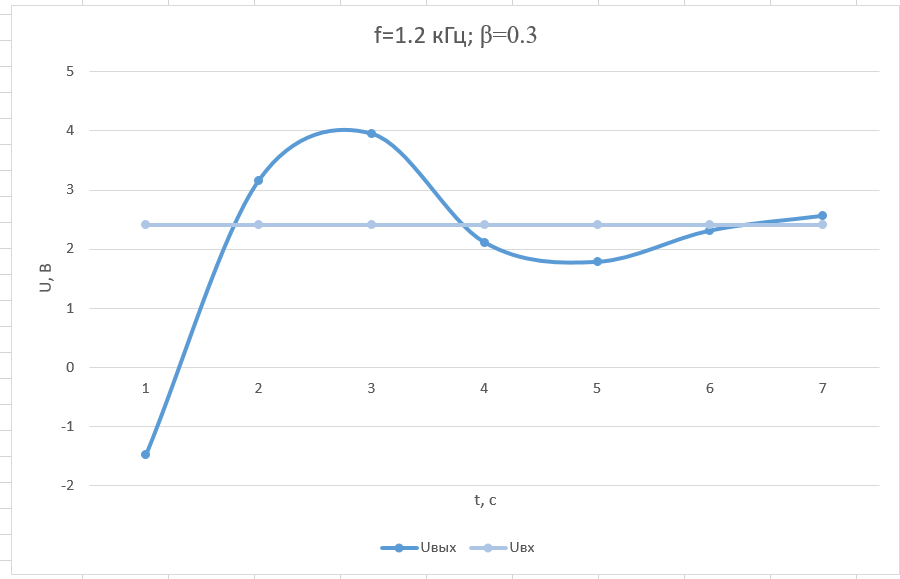
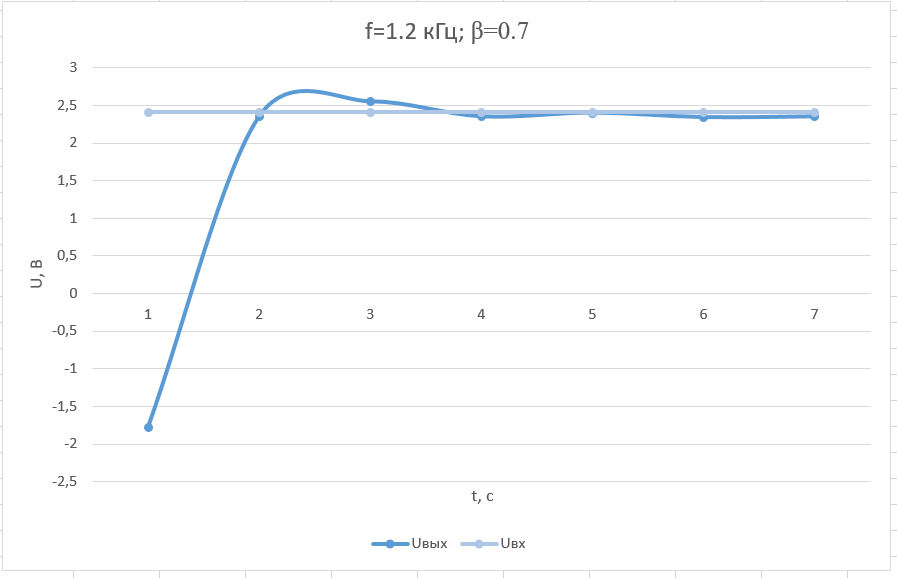
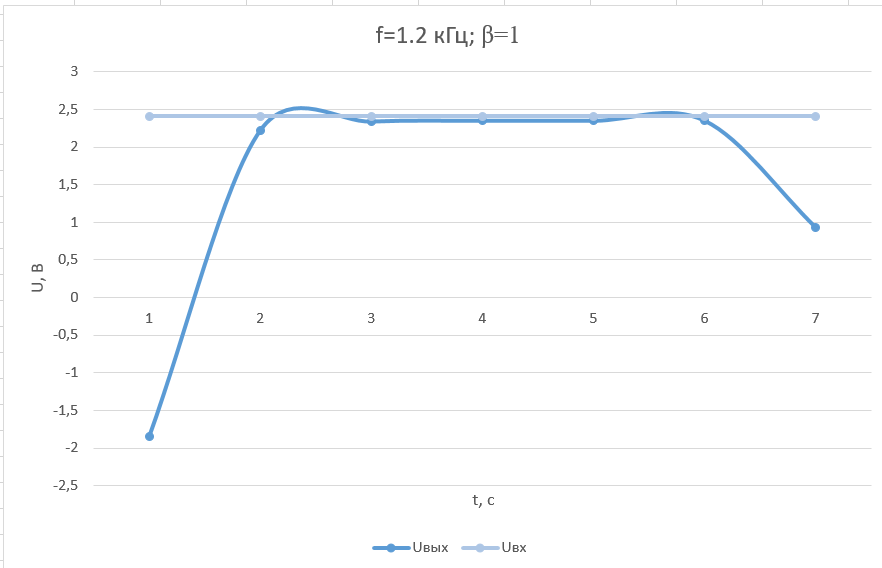
Рассмотрим случаи при постоянной
частоте
 :
:

Далее рассмотрим случаи, где постоянной
является коэффициент демпфирования,
 :
:
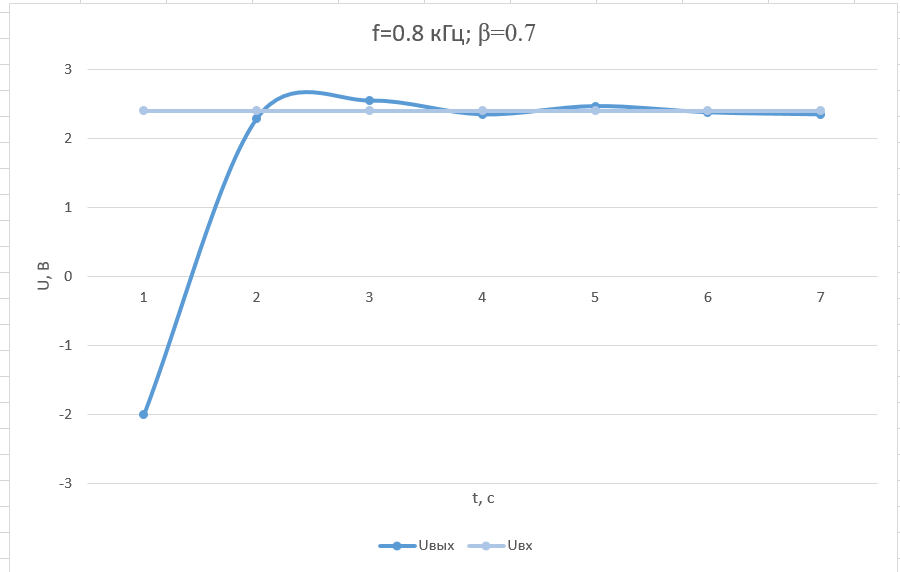
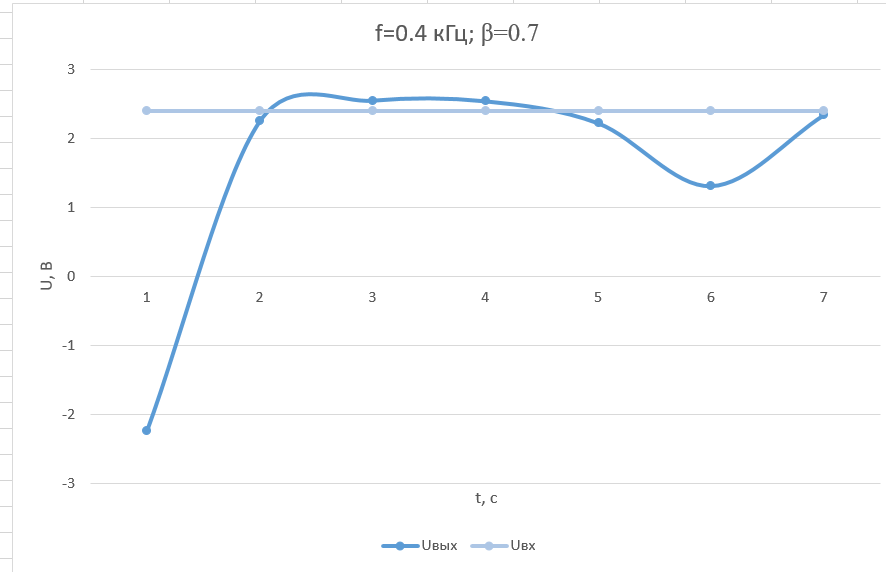
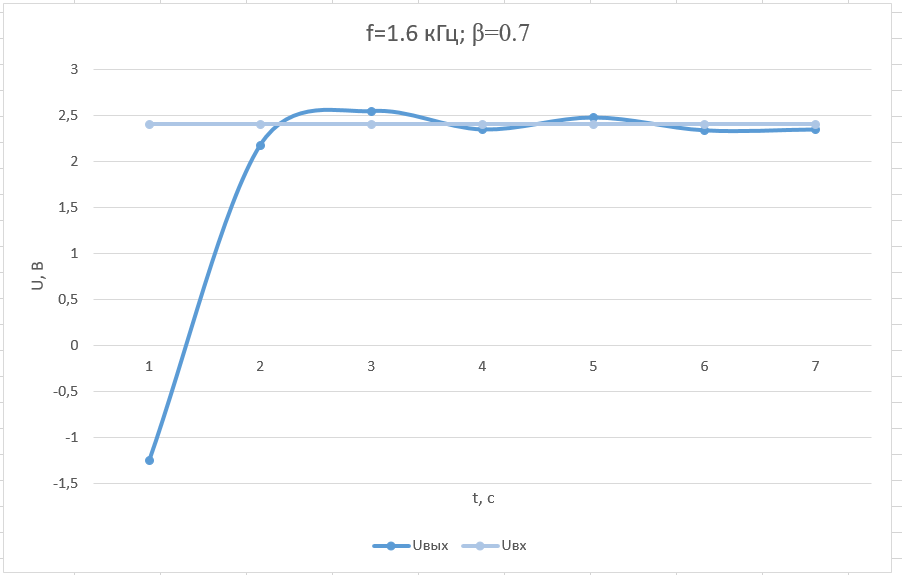
По полученным графикам можно сделать
выводы, что при постоянной частоте
 и при увеличении
и при увеличении
 время установления
время установления
 уменьшается, а далее достигает максимума.
Если же постоянным является коэффициент
демпфирования
уменьшается, а далее достигает максимума.
Если же постоянным является коэффициент
демпфирования
 и
и
 увеличивается , то время установления
уменьшается.
увеличивается , то время установления
уменьшается.
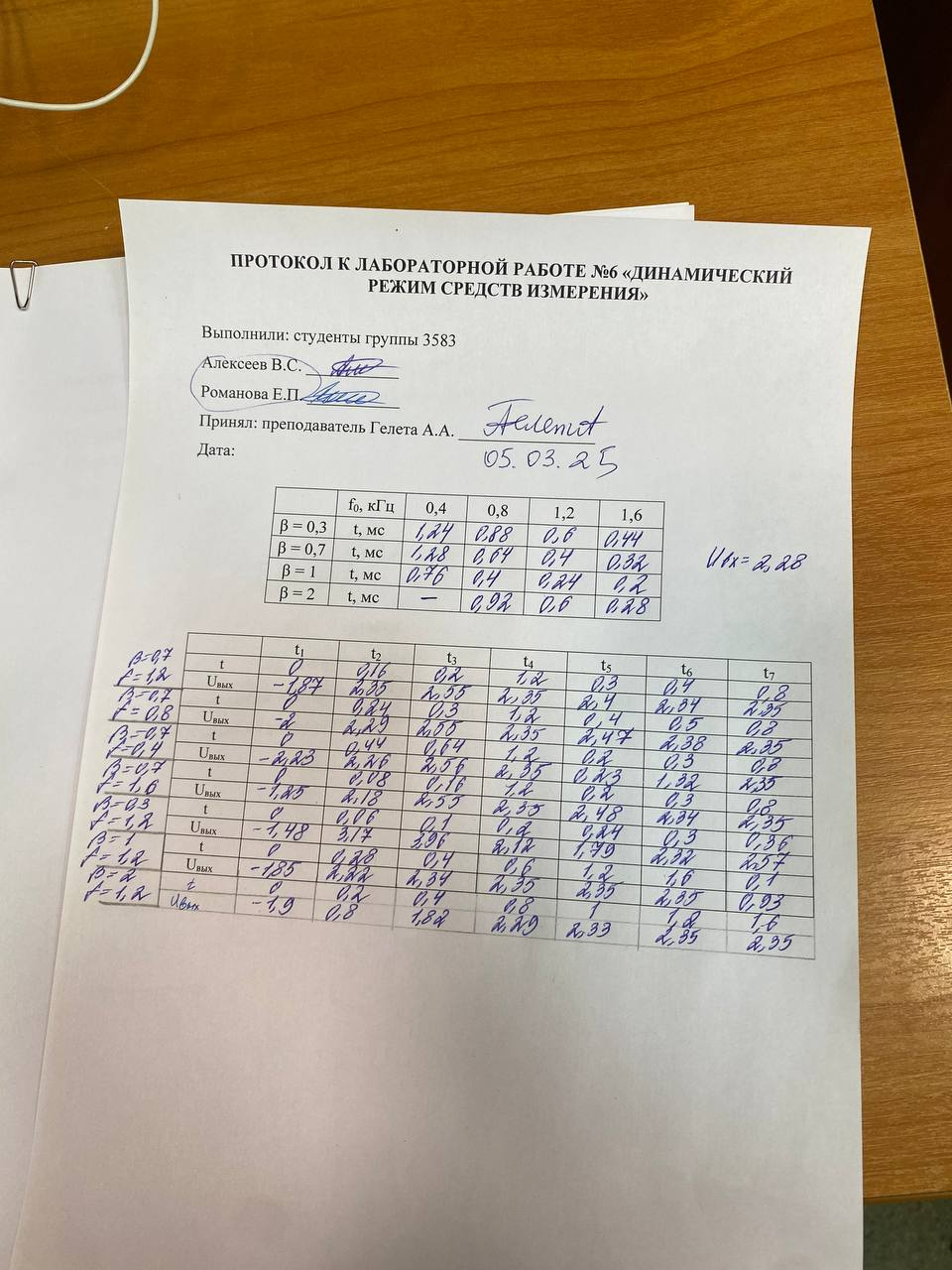
2. Исследование динамического режим заданных средств измерений при ступенчатом изменении входного сигнала.
Определим динамическую погрешность при заданных параметрах:
– частота собственных колебаний f0 = 1,2 кГц,
– коэффициент демпфирования β = 0,7.
Пример расчета при t= 0,2 мс:
Uвых= 2,55, Uвх= 2,28 ; ΔU= Uвх - Uвых= 2,28 – 2,55 = -0,27 [В]
Результаты измерений и вычислений представим в таблице
Таблица 1 - Динамическая погрешность при f0 = 1,2 кГц и β = 0,7
t, мс |
0 |
0,16 |
0,2 |
0,3 |
0,4 |
0,8 |
1,2 |
Uвых, В |
-1,87 |
2,35 |
2,55 |
2,4 |
2,34 |
2,35 |
2,35 |
Uвх, В |
2,28 |
2,28 |
2,28 |
2,28 |
2,28 |
2,28 |
2,28 |
ΔU, B |
4,15 |
-0,07 |
-0,27 |
-0,12 |
-0,06 |
-0,07 |
-0,07 |
Рисунок 1 - График входного и выходного сигналов
Рисунок 2 - Динамическая погрешность при заданных преподавателем значениях (f0 = 1,2 кГц и β = 0,7)
При увеличении частоты колебаний в рамках фиксированного коэффициента демпфирования падает динамическая погрешность.
3. Время установления выходного сигнала для различных частот собственных колебаний при заданном коэффициенте демпфирования.
Таблица 2 – Влияние частоты на время установления
|
f0, кГц |
0,4 |
0,8 |
1,2 |
1,6 |
β = 0,3 |
t, мс |
1,24 |
0,88 |
0,6 |
0,44 |
β = 0,7 |
t, мс |
1,28 |
0,64 |
0,4 |
0,32 |
β = 1 |
t, мс |
0,76 |
0,4 |
0,24 |
0,2 |
β = 2 |
t, мс |
- |
0,92 |
0,6 |
0,28 |
Построим график зависимости времени установления от частоты при постоянном коэффициенте демпфирования (рисунок 3).

Рисунок 3 - Время установления выходного сигнала для различных частот собственных колебаний при заданном коэффициенте демпфирования
Было выяснено, что при заданном коэффициенте демпфирования с ростом частоты собственных колебаний время установления сигнала уменьшается.
При заданных частотах найдем значения t для различных коэффициентов демпфирования.
Таблица 3 - Влияние коэффициента демпфирования на время установления
|
β |
0,3 |
0,7 |
1 |
2 |
f0 = 0,4 |
t, мс |
1,24 |
1,28 |
0,76 |
- |
f0 = 0,8 |
t, мс |
0,88 |
0,64 |
0,4 |
0,92 |
f0 = 1,2 |
t, мс |
0,6 |
0,4 |
0,24 |
0,6 |
f0 = 1,6 |
t, мс |
0,44 |
0,32 |
0,6 |
0,28 |
Построим график зависимости времени установления от коэффициента демпфирования при постоянной частоте (рисунок 4).

Рисунок 4 - Время установления выходного сигнала для различных коэффициентов демпфирования при заданной частоте
При фиксированной частоте время установления сигнала сначала падает, затем достигает минимума и после начинает расти. При заданной частоте собственных колебаний время установления минимально при β = 1, при уменьшении или увеличении коэффициента демпфирования от значения 1 время установления увеличивается.
Вывод: В ходе проведения лабораторной работы был изучен динамический режим средств измерений при ступенчатом изменении входного сигнала, а именно была определена динамическая погрешность при заданных параметрах звена, построены графики входного и выходного сигналов и графики динамической погрешности.
Определили время установления выходного сигнала для различных частот при заданном коэффициенте демпфирования и для различных коэффициентов демпфирования при заданных частотах, построили графики зависимости времени установления от частоты и от коэффициента демпфирования.
Были сделаны следующие выводы о влиянии частоты и коэффициента демпфирования на время установления и динамическую погрешность: при увеличении частоты колебаний в рамках фиксированного коэффициента демпфирования падает динамическая погрешность и уменьшается время установления сигнала; при фиксированной частоте время установления сигнала сначала падает, затем достигает минимума (при котором также минимальна динамическая погрешность) и после начинает расти.
Протокол: