Бульдозерный комплект.
-бульдозер -1 шт;
-грунтоуплотняющая машина- 1 шт;
-рыхлитель прицепной на базе трактора С – 100, при разработки грунтов III группы- 1 шт.
-машинист бульдозера(6 разряд)- 1 чел;
-машинист грунтоуплотняющей машины(5 разряд) – 1 чел;
- тракторист ( 4 разряда)- 1 чел;
-помощник тракториста ( 2 разряд) – 1 чел.
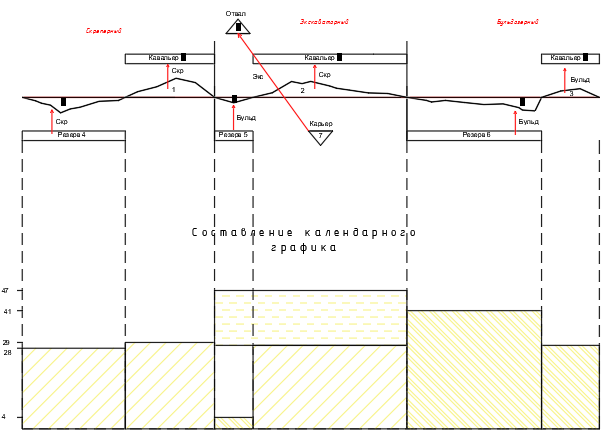
2.2 Составление календарного графика:
Поставщик i |
Потребитель j |
|
Перевозимый обьем, тип комплекта |
Принятая машин |
Колво машин |
Дальность возки |
Суточная производительность |
Срок производства работ |
1 |
4 |
14 |
539/СП |
СП с трактором Т-100 |
2 |
107,2 |
1810 |
30 |
2 |
5 |
13 |
597/СП |
СП с трактором Т-100 |
2 |
86,2 |
2049 |
29 |
3 |
6 |
13 |
142/Б |
ДЗ-350 |
1 |
69,8 |
485 |
29 |
4 |
1 |
13 |
529/СП |
СП с трактором Т-100 |
2 |
98,8 |
1896 |
28 |
5 |
2 |
13 |
26/Б |
ДЗ-350 |
1 |
50 |
632 |
4 |
6 |
3 |
13 |
228/Б |
ДЗ-350 |
1 |
59,6 |
548 |
41 |
7 |
7 |
0 |
783/Экс |
Э0-6112Б |
2 |
1000 |
1799 |
19 |

Таблица 6. Календарный график
3. Проектирование технологической карты на разработку выемки экскаватором прямая лопата
3.1 Технологическая карта на разработку выемки экскаватором прямая лопата с транспортировкой грунта в насыпь автосамосвалами
3.1.1Область применения
Технологическая карта предусматривает разработку выемок одноковшовыми экскаваторами с рабочим оборудованием прямой лопатой и емкостью ковша 0,5…2,5 м3, с погрузкой грунта I–IV групп на автосамосвалы и транспортированием его для укладки в насыпь, кавальер или отвал на связи 7-7’.
Во всех случаях применения технологической карты необходима привязка ее к конкретным условиям производства работ.
3.1.2Указания по технологии строительного процесса
Обоснование и выбор вида экскаваторной проходки. Основной задачей проектирования экскаваторных проходок при разработке выемок экскаватором прямая лопата является размещение боковых и лобовых проходок в продольном и поперечном сечениях разрабатываемого массива по всей длине выемки. Однако для этого сначала необходимо обосновать и выбрать вид экскаваторной проходки, затем рассчитать геометрические размеры забоя и только после этого переходить непосредственно к проектированию проходок.
Условия работы одноковшовых экскаваторов в забоях и различные виды проходок детально рассматриваются в учебнике [1]. Для обоснованного выбора того или иного вида проходки и соответственно забоя необходимо учитывать следующие особенности производства работ.
При разработке бокового забоя угол поворота экскаватора значительно меньше, чем при лобовом. Кроме того, удобнее подача транспортных средств, их погрузка, возможность организации сквозного движения транспорта. Все это ведет к увеличению производительности экскаватора. Однако в этом случае объем грунта, разрабатываемого с одной стоянки, уменьшается и, как правило, возрастает число передвижек экскаватора.
Лобовой забой позволяет разрабатывать с одной стоянки значительно больший объем грунта, благодаря чему сокращается число передвижек экскаватора. Недостатком этого забоя является необходимость подачи транспортных средств по дну проходки задним ходом и установки их сзади экскаватора, что вызывает существенное увеличение угла поворота и, следовательно, снижение производительности экскаватора .В практике железнодорожного строительства более широкое применение при разработке выемок и карьеров получили боковые проходки с погрузкой грунта на транспортные средства. В то же время в самом начале процесса вскрытия выемки часто оказывается целесообразным первые одну-две проходки устраивать лобовыми, по дну которых в дальнейшем будут подаваться под погрузку транспортные средства. Аналогичная целесообразность возникает и при разработке короткой, но довольно глубокой выемки с крутыми склонами, препятствующими движению транспортных средств.
Указанные обстоятельства необходимо учитывать при проектировании экскаваторных проходок.
Расчет экскаваторного забоя. После того, как выбран вид экскаваторной проходки, приступают к расчету основных геометрических размеров забоя, разрабатываемого конкретным экскаватором с известными его техническими характеристиками, приведенными в первой части методических указаний [2, прил. 1, табл. 2] или в прил. 1 настоящих методических указаний.
Расчетные схемы бокового и лобового забоев приведены на рис. 2.1. Боковой забой может быть двухъярусным или одноярусным. В первом случае (рис. 2.1,а) транспортные средства располагаются выше уровня сто- янки экскаватора, во втором – на одном уровне с экскаватором.
Для того чтобы построить в масштабе поперечный профиль забоя, необходимо определить (см. рис. 2.1):
наибольшую ширину забоя Вmax (ширину забоя по верху);
наименьшую ширину забоя Вmin (ширину забоя по дну);
наибольшую глубину забоя Hз (берется из технической характеристики экскаватора);
величину превышения hя погрузочного пути над уровнем стоянки экскаватора (для бокового двухъярусного забоя);
максимальный радиус копания Rmax на уровне напорного вала экскаватора (берется из технической характеристики экскаватора).
Для бокового забоя величина Вmax, как видно из расчетной схемы (см. рис. 2.1,а), составит
Вmax
=
В + Вп
=
 (5)
(5)
где В – расстояние от оси стоянки экскаватора до верхней кромки забоя;
Вп – расстояние от оси стоянки экскаватора до бровки у погрузочного пути.
Из расчетной схемы следует, что
 B
=
=
B
=
= м
(6)
м
(6)
Вп
= Rв
– (bт/2
+ 1м)=
 м
(7)
м
(7)
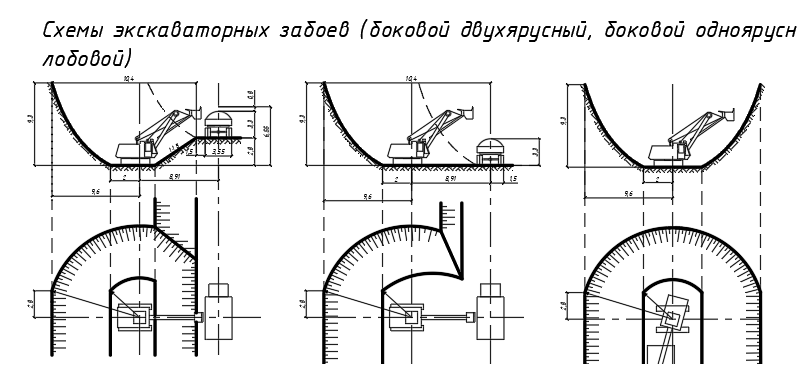
Рис. 2.1. Схемы экскаваторных забоев, разрабатываемых экскаватором прямая лопата:
а – боковой двухъярусный забой; б – лобовой забой;
1–3 – номера стоянок экскаватора
Здесь Rпр – практический радиус копания.
В курсовом проекте можно принимать
Rпр
≈ (0,85…0,90) ∙ Rmax,=
 м
(8)
м
(8)
где Rmax – наибольший радиус копания на уровне напорного вала экскаватора (принимается из технической характеристики экскаватора);
lп – длина передвижки экскаватора,
lп
≈
0,75 lр
= м
(9)
м
(9)
Rв – радиус выгрузки при наибольшей высоте выгрузки (принимается из технической характеристики экскаватора);
bт – ширина колеи транспортных средств (принимается по справочным данным);
1 м – запас из условия необрушения откоса яруса.
Наименьшая ширина бокового забоя Вmin составит (см. рис. 2.1,а):
Вmin
=
B1
+
B2= (10)
(10)
где B1 – расстояние от оси стоянки экскаватора до подошвы откоса забоя.
В курсовом проекте для двухъярусного бокового забоя можно принимать
B1
≈
Rст
 (11)
(11)
где Rст – радиус копания на уровне стоянки экскаватора (принимается из технической характеристики);
B2 – расстояние от оси стоянки экскаватора до нижней кромки откоса яруса.
Как видно из рис. 2.1,а, расстояние
B2
=
Bп
+
hя= (12)
(12)
где hя – высота яруса (превышение уровня погрузочного пути над уровнем стоянки экскаватора).
В свою очередь
hя
= Hт
– (hт
+ 0,5 м)=
 (13)
(13)
где Hт – наибольшая высота выгрузки грунта из ковша экскаватора;
hт – высота автосамосвала до верха кузова (принимается по справочнику);
0,5 м – запас высоты над бортом автосамосвала, учитывающий неровности пути и возможность погрузки грунта "с шапкой".
Выполнив необходимый расчет забоя, на листе миллиметровой бумаги в масштабе 1:100 или 1:200 вычерчивают его поперечное сечение и план. Затем поперечный профиль забоя переносится на более плотную бумагу или картон и по нему вырезается шаблон для проектирования экскаваторных проходок.
Проектирование поперечного и продольного профилей экскаваторных проходок. Основная цель проектирования заключается в размещении проходок на поперечных сечениях и продольном профиле заданного участка выемки.
Для этого на продольном профиле выемки намечаются одно-два сечения в наиболее характерных местах, а затем в масштабе, одинаковом с тем, в котором сделан шаблон забоя, вычерчиваются указанные поперечные сечения выемки. Накладывая построенный шаблон забоя на поперечный профиль выемки, намечают различные варианты размещения проходок (рис. 2.2).
При этом, с точки зрения технологии производства работ, вскрытие выемки целесообразно начинать с устройства первой или пионерной лобовой проходки траншеи, которая в дальнейшем используется как временный путь для движения автосамосвалов или другого вида транспорта. Поэтому ее ширина по низу должна быть не менее 4 м [3]. Глубина пионерной траншеи hп.т зависит от соотношения глубины выемки Нв и высоты яруса hя, определяемого как
n = (Нв – 0,35)/hя=(9,3-0,35)/2,8=3 (14)
где n – расчетное количество ярусов.
При n, равном целому числу, пионерная траншея фактически становится первой лобовой проходкой, разрабатываемой в соответствии с имеющимся шаблоном экскаваторного забоя. Если величина n оказывается не кратной целому числу, то глубина пионерной траншеи определяется из выражения:
hп.т = Нв – nhя – 0,35=9,3-3*2,8-0,35=0,5 м (15)
где n – целое число ярусов.
Пионерные траншеи глубиной до 1,0–1,5 м целесообразно разрабатывать бульдозером или скрепером. Эти же машины рекомендуется использовать и для разработки участков выемки от нулевой отметки до глубины 2 м, так как применять экскаватор в подобных местах неэффективно.
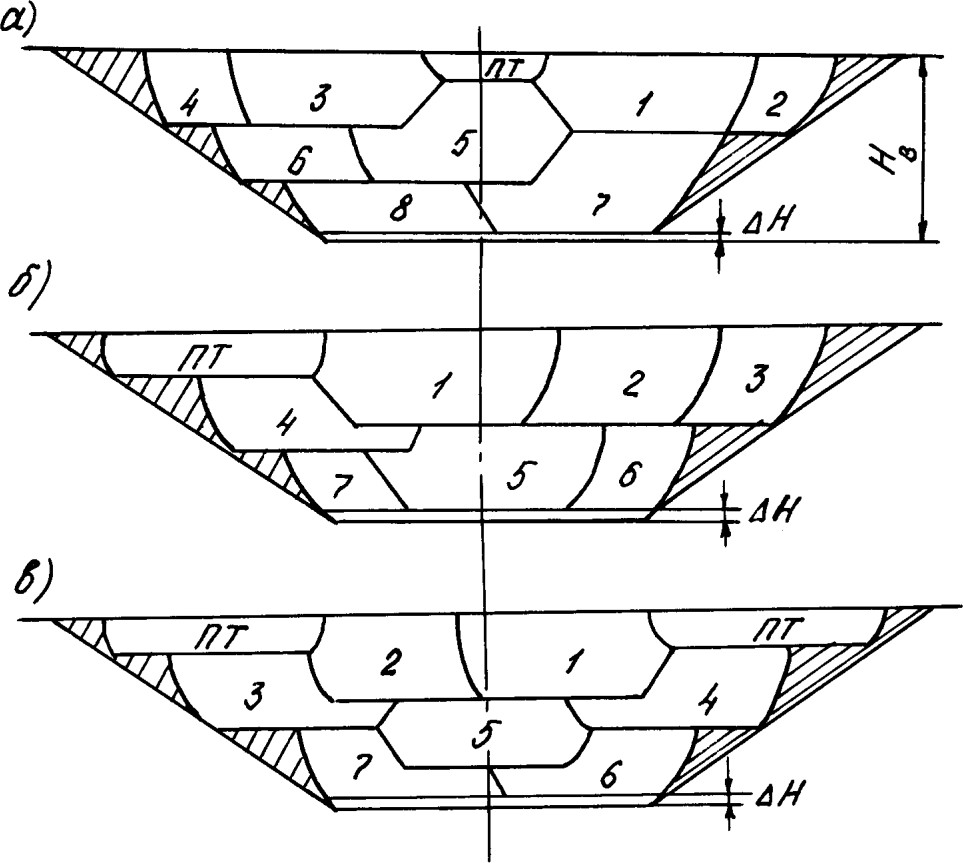
Рис. 2.2. Варианты размещения проходок на поперечных сечениях выемки:
а – с пионерной траншеей (ПТ) по оси выемки; б – с пионерной траншеей со стороны откоса; в – то же, с двумя пионерными траншеями; 1–8 – номера экскаваторных проходок;
△Н – недобор грунта до проектной отметки, учитывающий последующую нарезку сливной призмы (принимается равным 0,2 м)
Выбирая наилучший вариант размещения проходок на поперечном профиле выемки, необходимо учитывать следующие рекомендации [3]:
число проходок должно быть по возможности минимальным;
более предпочтительной является разработка выемки (карьера) боковым забоем с погрузкой грунта в транспортные средства, располагаемые на уровне стоянки экскаватора;
наименьшая высота (глубина) забоя должна быть не менее 1/3 высоты до напорного вала экскаватора;
недобор грунта на откосах не должен превышать 8–10% от площади поперечного сечения выемки.
Далее вычерчивают продольный профиль заданного участка в масштабе горизонтальном 1:5000, 1:2500 и вертикальном, равном масштабу шаблона забоя. Проектирование продольного профиля экскаваторных проходок начинается с разбивки массива выемки на ярусы с учетом рельефа местности и вида грунта. Так, если выемка имеет пологие продольные склоны и ук- лон проектной линии более 0,003, то целесообразно разбить ее на ярусы, расположенные параллельно проектной линии. При этом подошва нижнего яруса должна располагаться с некоторым превышением Н над проектной линией (рис. 2.3), учитывающим высоту сливной призмы с минимальным запасом на планировочные работы.
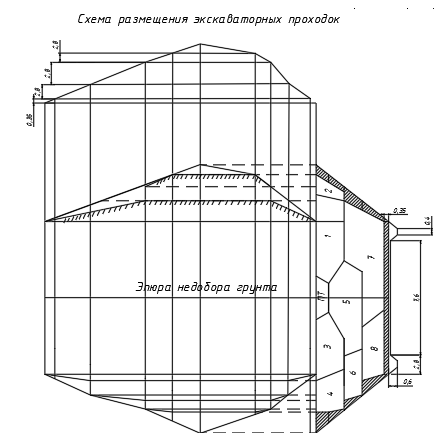
Рис. 2.3. Схема размещения экскаваторных проходок
на поперечном сечении, продольном профиле и плане выемки: 1–8 – номера проходок на поперечном сечении выемки; I–VIII – номера проходок на продольном профиле выемки
В случае, когда выемка имеет крутые склоны, исключающие движение по ней экскаватора и транспортных средств, более эффективной оказывается разбивка ее лучевыми или веерообразными проходками, направленными под углом к проектной линии. При этом крутизна уклонов для передвижения экскаватора и транспорта не должна превышать 17–24.
Длинные выемки с большими рабочими отметками могут разрабатываться одновременно с двух концов. В подобных случаях наиболее целесообразной оказывается разбивка на ярусы ломаного профиля, состоящего из двух концевых участков веерообразного профиля и центрального участка с параллельными ярусами. Все эти и другие случаи расположения проходок на продольном профиле выемки приведены в учебнике [1], а ниже (см. рис. 2.3) дан конкретный пример решения этой задачи для одного из поперечников, рассмотренных ранее (см. рис. 2.2,а), и участка продольного профиля.
Как видно из рис. 2.3, план выемки с размещенными на ней проходками фактически представляет из себя третью проекцию, построенную (восстановленную) по известным двум. При этом все проходки пронумерованы с учетом последовательности их разработки, а недобор грунта определяется заштрихованными треугольниками на поперечном сечении выемки.
Технология производства экскаваторных работ. Технологический процесс состоит из разработки грунта в забое экскаватором прямая лопата, погрузки его на автосамосвалы или другие транспортные средства, перемещения и разгрузки грунта в насыпь, кавальер или отвал, послойного разравнивания грунта бульдозером и уплотнения специальными уплотняю- щими средствами (катками, уплотняющими машинами и др.).
Разработка выемки ведется отдельными проходками в соответствии с ранее составленной схемой их размещения (см. рис. 2.3) и в пределах конкретного рабочего участка продольного профиля.
Типовая технологическая схема производства работ для рассматриваемого примера приведена на рис. 2.4.
При выполнении курсового проекта необходимая грузоподъемность автосамосвалов, технические характеристики и ориентировочное число самосвалов в составе экскаваторного комплекта можно принимать из первой части методических указаний [2, прил. 1]. Точное количество транспортных средств определяют расчетом для каждого конкретного случая с учетом фактических условий работы и дальности возки:
N
=
Tц
/
tп
=
(tп
+
tгр.х
+
tp
+
tм.р
+
tпор.х
+
tм.п)
/ tп= (16)
(16)
 (17)
(17)
 (18)
(18)
 (19)
(19)
 (20)
(20)
 (21)
(21)
где N – искомое число транспортных средств;
tп – продолжительность погрузки, мин;
tгр.х, tпор.х – соответственно продолжительность груженого и порожнего хода автосамосвала;
tp – продолжительность разгрузки, мин;
tм.р, tм.п – время на маневры автосамосвала соответственно при разгрузке и погрузке, мин.
Задаваясь средней скоростью движения автосамосвала Vср [2] и дальностью возки l, можно записать:
N = (2 l/Vср + tп + tp + tм.р + tм.п) / tп =((2*1/0,4)+1,5+1+1,5+1,5)=11 (22)
В курсовом проекте продолжительность отдельных операций, точное значение которых устанавливается хронометражем, принимается ориентировочно следующей:
tп = 1,5 мин, tp = 1 мин, tм.р = tм.п = 1,5 мин.
Из приведенной формулы следует, что очередной автосамосвал должен прибыть к месту загрузки его грунтом не позднее времени окончания загрузки предыдущего автосамосвала.
При возникновении систематических простоев экскаватора в ожидании прибытия автосамосвалов к месту погрузки следует проверить элементы затрат времени, необходимых для выполнения рейса, и увеличить число автосамосвалов. При простоях транспорта в ожидании погрузки следует принять меры к ускорению работы экскаватора или уменьшить число транспортных средств.
В курсовом проекте в качестве индивидуального задания может быть поставлена задача расчета оптимального количества транспортных средств с применением современных математических методов, например, теории массового обслуживания.
Техника безопасности. При производстве работ одноковшовым экскаватором с погрузкой грунта на автосамосвалы и транспортированием его в насыпь необходимо соблюдать следующие основные правила техники безопасности.
Экскаватор во время работы должен устанавливаться на спланированной площадке. Запрещается подкладывать под гусеницы бревна, камни и другие предметы.
Запрещается находиться под ковшом или стрелой экскаватора, выполнять работы со стороны забоя. Посторонним лицам запрещается находиться в радиусе действия экскаватора. Во время перерывов в работе ковш следует опускать на землю.
За участками забоя, где возможны оползни и обрушения грунта, должно устанавливаться постоянное наблюдение. Участки должны ограждаться, а работа на них разрешается только после их осмотра мастером или прорабом и получения письменного разрешения на производство работ.
При работе экскаватора в темное время суток место выгрузки грунта и забой должны иметь хорошее освещение.
Грунт на автосамосвалы следует грузить только со стороны заднего или бокового борта самосвала. Запрещается проносить ковш с грунтом и без грунта над кабиной. Водитель автосамосвала во время погрузки должен выходить из кабины.
Находящийся под погрузкой автосамосвал должен быть заторможен. Во время погрузки людям запрещается находиться между экскаватором и транспортным средством.
Указания по организации труда
Разработка выемки экскаватором прямая лопата с погрузкой грунта на автосамосвалы, транспортированием его в насыпь осуществляется комплексной бригадой в зависимости от емкости ковша экскаватора и дальности транспортирования грунта.
В целях более полной загрузки машин и механизмов работу целесообразно организовывать в две смены с использованием передвижной электростанции для освещения места работ в темное время суток.
В начале каждой смены машинисты и водители машин обязаны проверить готовность машин к работе, устранить мелкие неисправности, заправить машину горючим и водой. А в конце смены сообщить механику (помощнику машиниста) о замеченных неисправностях.
Участок производства работ обеспечивается вагончиками для мастера, кладовой инструмента и инвентаря, отдыха рабочих и приема пищи, а также питьевой и технической водой, медицинской аптечкой, средствами связи.
3.1.3 Материально-технические ресурсы
Материально-технические ресурсы включают ведущие и комплек- тующие машины и механизмы, геодезические инструменты, инвентарь, определяемые на основе разработанных ранее технологических процессов (п. 3.1.1)
Наименование |
Марка |
Количество |
Экскаватор |
Экскаватор ЭО-6112Б |
2 |
Скрепер прицепной |
ДЗ-259 |
1 |
Грунтоуплотняющая машина |
– |
1 |
Передвижная электростанция мощностью от 5 до 7 кВт. |
– |
1 |
3.1.4 График выполнения производственного процесса по разработке выемки экскаватором прямая лопата
На основании разработанной ранее технологии и организации строительного процесса (п. 2.1.1) в типовой технологической карте обычно приводится почасовой график выполнения работ в течение смены. В условиях курсового проектирования вместо указанного графика разрабатывается календарный график производства земляных работ на весь заданный уча- сток. Методика его проектирования детально рассматривается в разд. 5.