

Laba_4
.doc
МИНОБРНАУКИ РОССИИ
Санкт-Петербургский государственный
электротехнический университет
«ЛЭТИ» им. В.И. Ульянова (Ленина)
Кафедра Систем автоматического управления
отчет
по лабораторной работе №4
по дисциплине «Проектирование систем управления в пакете математического моделирования NI LabVIEW»
Тема: «ПИ-регулятор»
Студент гр. 1487 |
|
Томозов Г. Н. |
Преподаватель |
|
Бельский Г. В. |
Санкт-Петербург
2024
Цель работы.
В лабораторной работе необходимо реализовать систему управления двигателем постоянного тока (ДПТ).
Основные теоретические положения.
ДПТ является сравнительно простым объектом с точки зрения управления: его динамика может быть достаточно достоверно описана линейной моделью, механическая характеристика описывается прямой, приводится в работу постоянным напряжением. В целом задачу можно разбить на две части - определение скорости вращения и формирование управляющего напряжения.
Для определения скорости вращения используется обычный оптический энкодер. Так как скорость может достигать 200 оборотов в секунду, определять скорость в реальном времени с помощью цифровых сигналов исполняя программу в операционной системе скорее всего не получится. Поэтому измерять придется аналоговый сигнал и в нем пытаться определить частоту импульсов.
Для генерации напряжения предлагается использовать источник регулируемого напряжения (Variable Power Supply), который позволяет задать любое напряжение в диапазоне от 0 до +12 В.
Для расчёта уровня напряжения необходимо использовать замкнутую систему управления. В виду наличия постоянного возмущения в двигателе (как минимум, сопротивление подшипника), целесообразно использовать ПИ-регулятор.
Формирование напряжения.
Чтобы двигатель закрутился, нужно на его обмотку подать достаточное напряжение. Предлагаемый к использованию Variable Power Supply выступает как обычный аналоговый выход и настраивается как обычно. На каждый такт расчета определяется одно значение напряжения, поэтому никаких буферных операций здесь не требуется.
Рассчитывается напряжение на основе регулятора по ошибке. Ошибка - разность между желаемым значением скорости (в данной работе задается с лицевой панели) и измеряемым значением скорости.
Уравнение ПИ-регулятора можно записать с помощью выражение:
![]()
В дискретной форме интеграл меняется на сумму:
Единственное что обязательно нужно предусмотреть - результирующее напряжение не может выходить за пределы возможностей Variable Power Supply, то есть должно быть ограничено от 0 В до 12 В.
Коэффициентами регулятора можно настроить систему. Первоначально надо добиться устойчивости системы (выхода на и поддержания заданной скорости), а затем добиться плавной динамики с временем регулирования не больше 1 секунды.
Аппаратная часть:
Как было сказано выше - для измерения скорости используется оптический энкодер, который является по сути обычной оптической парой. Оптопара это - фототранзистор и направленный на него инфракрасный светодиод. Когда свет с диода попадает на чувствительный элемент транзистора тот пропускает электрический ток, если свет не попадает - ток не пропускается. Для измерения скорости на вращающийся вал помещают непрозрачный диск с вырезами. При вращении свет то проходит через вырез, то блокируется диском, что создает изменение падения напряжение на нагрузке в форме импульсов. Нагрузка представляет из себя обычный резистор, который является, по сути, обычной подтяжкой к земле.

Рисунок 1 Схема подключения энкодера
Несмотря на то, что оптроны часто изготавливают как единое устройство, на самом деле это два независимых элемента, что позволяет их использовать как схемы гальванической развязки и схемы согласования уровней.
Для оценки скорости по измеряемому напряжению нужно получить продолжительную осциллограмму (waveform), обязательно с настройками времени, именно по ним будет рассчитываться период между пульсами. Измерять поможет функция Pulse Measurments, которая находится в Signal Processing\Waveform Measurments. Среди прочего функция возвращает период пульсов. Зная период пульсов и количество вырезов в диске энкодера можно рассчитать скорость любых единицах (обычно используют обороты в минуту).
Здесь же необходимо решить проблему отсутствия импульсов. Есть двигатель не вращается, например, в начале работы программы, напряжение меняться не будет, а значит измерить импульсы тоже невозможно.
Здесь возможны два варианта - система распознает импульсы из-за шума измерения, либо не распознает ничего и выдаст ошибку. Оба варианта должны быть обработаны программно.
Задание на работу:
Для выполнения лабораторной работы необходимо реализовать систему управления двигателем постоянного тока по скорости. Желаемая скорость должна задаваться с лицевой панели. Система управления не должна допускать наличия статической ошибки. Для отчета необходимо построить переходную характеристику.
Экспериментальные результаты.
Блок схемы:
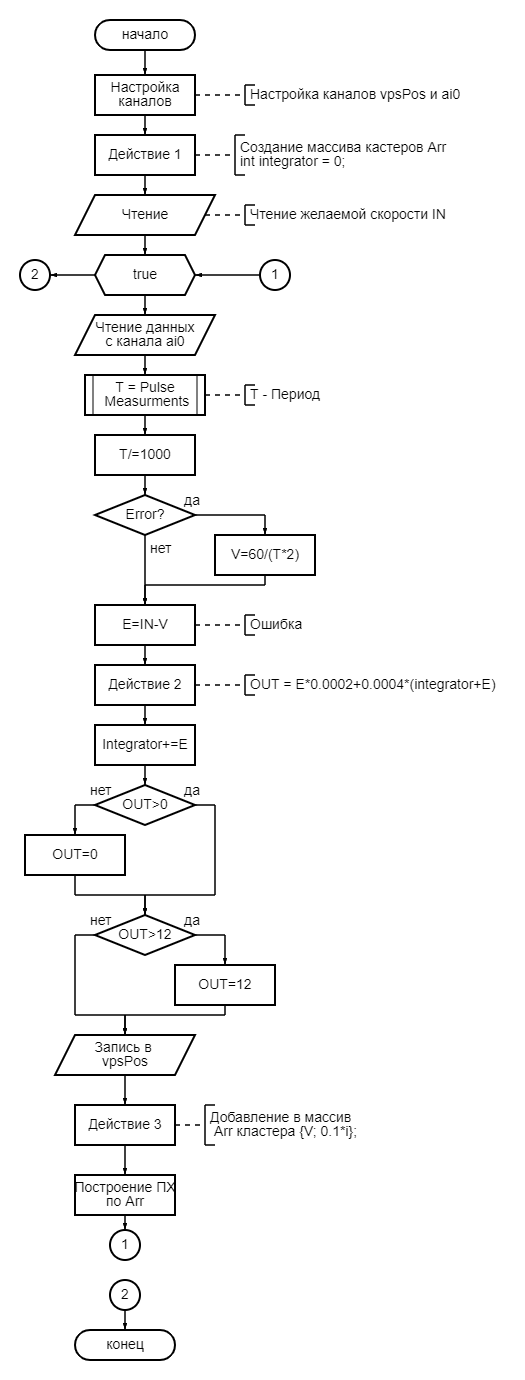
Рисунок 2 Блок-схема программы
Программа:
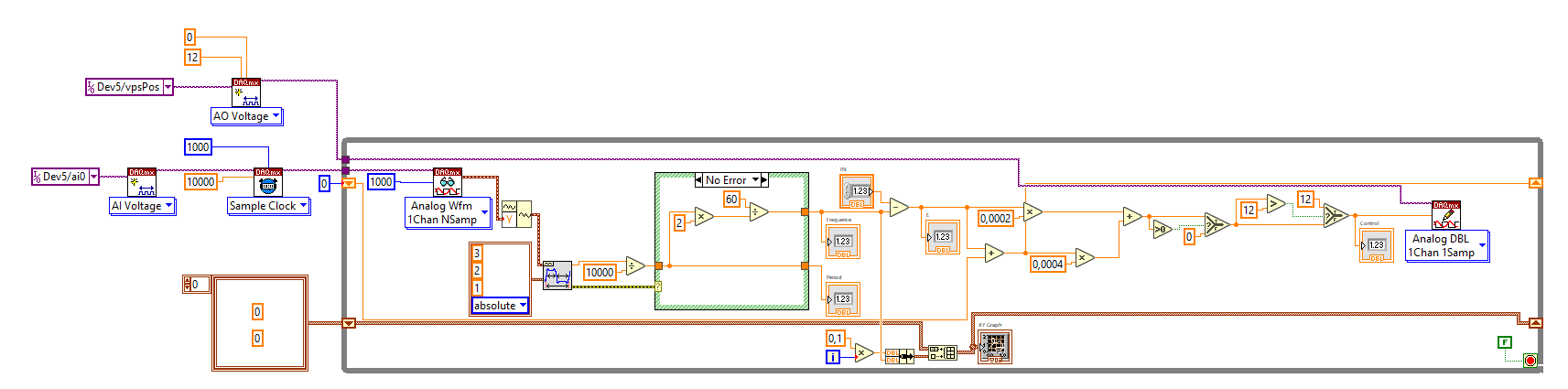
Рисунок 3 Блок диаграмма программы
Интерфейс программы:
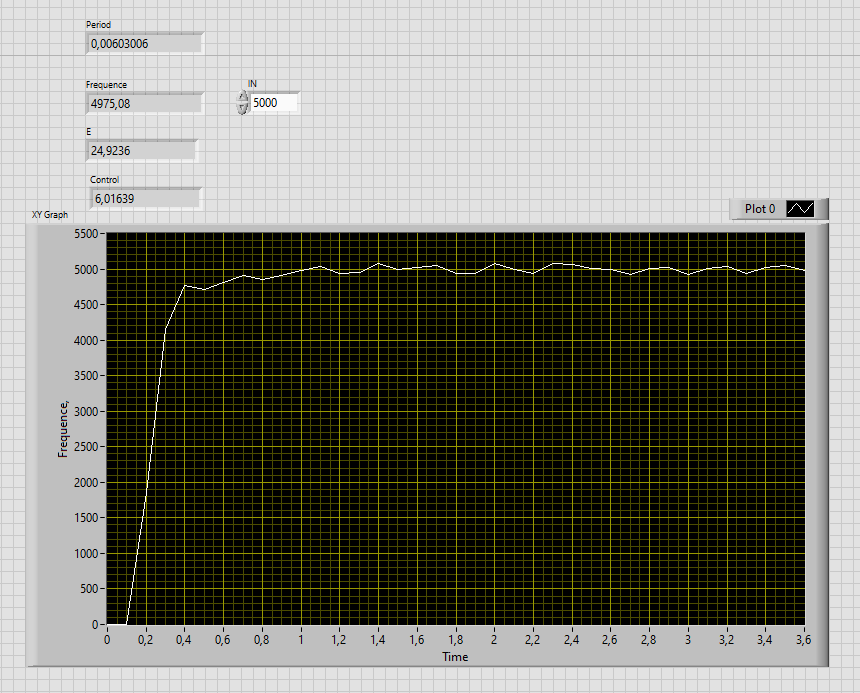
Рисунок 4 Интерфейс программы
Результат работы:
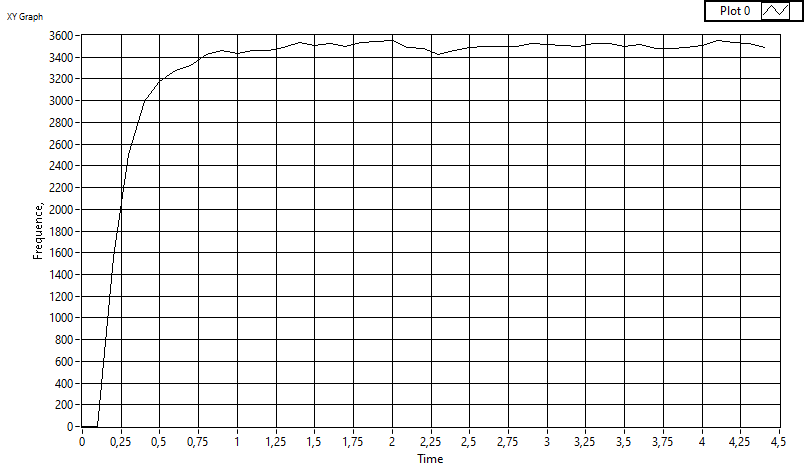
Рисунок 5 Результат работы. Переходная характеристика
Выводы.
В данной лабораторной был разработан ПИ-регулятор для управления скоростью вращения ДПТ. В результате была получена переходная характеристика со временем регулирования 0,75 секунд.