

Laba_1 (1)
.docxМИНОБРНАУКИ РОССИИ
Санкт-Петербургский государственный
электротехнический университет
«ЛЭТИ» им. В.И. Ульянова (Ленина)
Кафедра Систем автоматического управления
отчет
по лабораторной работе №1
по дисциплине «Нелинейные системы управления»
Тема: «Светофор»
Студент гр. 1487 |
|
Томозов Г. Н. |
Преподаватель |
|
Бельский Г. В. |
Санкт-Петербург
2024
Цель работы.
Ознакомление с драйвером DAQmx и с лабораторный стендом
Основные теоретические положения.
В работе необходимо создать модель регулируемого Т-образного перекрёстка. Каждый светофор представлен тремя светодиодами – красный, жёлтый, зелёный.
Светодиод - полупроводниковый элемент, который пропускает ток в одном направлении и запирает в обратном. При прохождении через него электрического тока светодиод загорается. Таким образом для управления светодиодом необходимо управлять подаваемым на него напряжением. Так как в данном случае яркость светодиода не имеет значения, управление осуществляется в бинарном виде – напряжение либо есть, либо его нет совсем.
При таком управлении удобнее всего воспользоваться цифровыми линиями DIO - Digital Inpit/Output. Таких линий на макетной плате стенда 24 - DIO 0 - DIO 23 и расположены они все сверху справа. Для работы со светодиодом цифровую линию нужно подвести к аноду (обычно длинная нога светодиода), а землю (Ground) к катоду (короткая нога).
Алгоритм работы светофоров подразумевает непрерывное последовательное переключение цветов с небольшими временными задержками.
Помимо светодиодов - сигналов светофоров, в работе используются два семисегментных индикатора, которые позволяют выводить различные символы. С их помощью можно выводить время до смены сигнала. Индикатор представляет из себя 8 светодиодов в одном корпусе с общим катодом и раздельными анодами.
Ход работы.
Физическая реализация:
Регулируемый Т-образный перекрёсток представлен на рисунке 1. Обычно такие перекрёстки имеют 3 светофора, два из который работают синхронно, поэтому в нашей модели будет достаточно использовать 2 набора светодиодов.
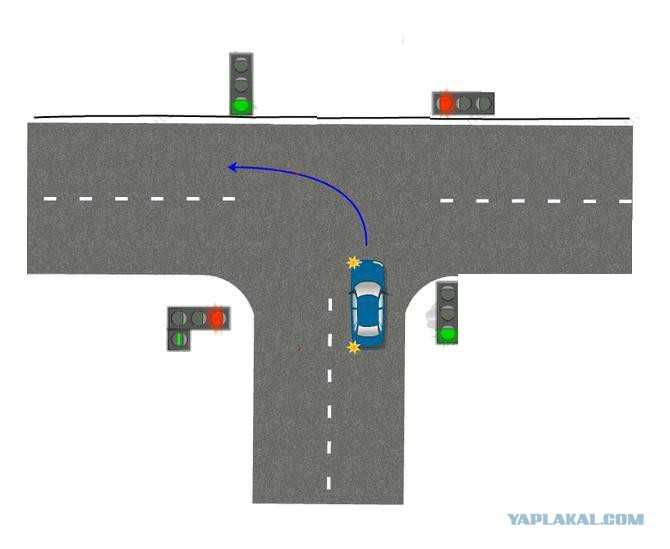
Рисунок 1 Регулируемый Т-образный перекрёсток
Так как яркость светодиода не имеет значения, управление осуществляется в бинарном виде – напряжение либо есть, либо его нет совсем.
При таком управлении удобнее всего воспользоваться цифровыми линиями DIO - Digital Inpit/Output. Схема подключения представлена на рисунке 2.
Светофор 1:
Красный светофор: анод – DIO0, катод – GND
Жёлтый светофор: анод – DIO1, катод – GND
Зелёный светофор: анод – DIO2, катод - GND
Светофор 2:
Красный светофор: анод – DIO3, катод – GND
Жёлтый светофор: анод – DIO4, катод – GND
Зелёный светофор: анод – DIO5, катод - GND
Индикатор 1: A-F – DIO6-12, GND - GND
Индикатор 2: A-F – DIO13-19, GND - GND
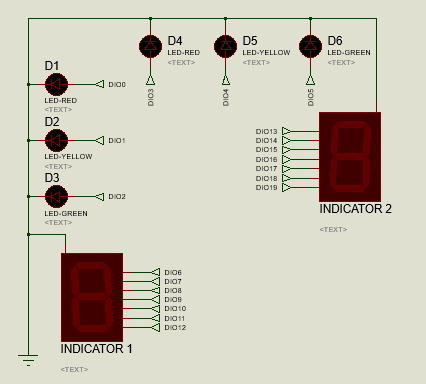
Рисунок 2 Принципиальная схема
Программная реализация:
Для управления движением на Т-образном перекрёстке необходимо одновременно управлять каждым светофором, а также выводить на соответствующие индикаторы количество секунд до смены сигнала, поэтому программа разделена на три больших блока: управление светофорами, управление индикатором 1, управление индикатором 2. Каждый блок выделен и представляет собой отдельный бесконечный цикл while. Для разделения состояний используем структуру Flat Sequence, для установки времени горения (мигания) используем функцию wait.
На рисунках 3-8 представлены блок схемы, а также код программы, написанной в LabVIEW.

Рисунок 3 Блок схема программы

Рисунок 4 Управление индикаторами - таймерами

Рисунок 5 Управление светофорами

Рисунок 6 Функция indicator
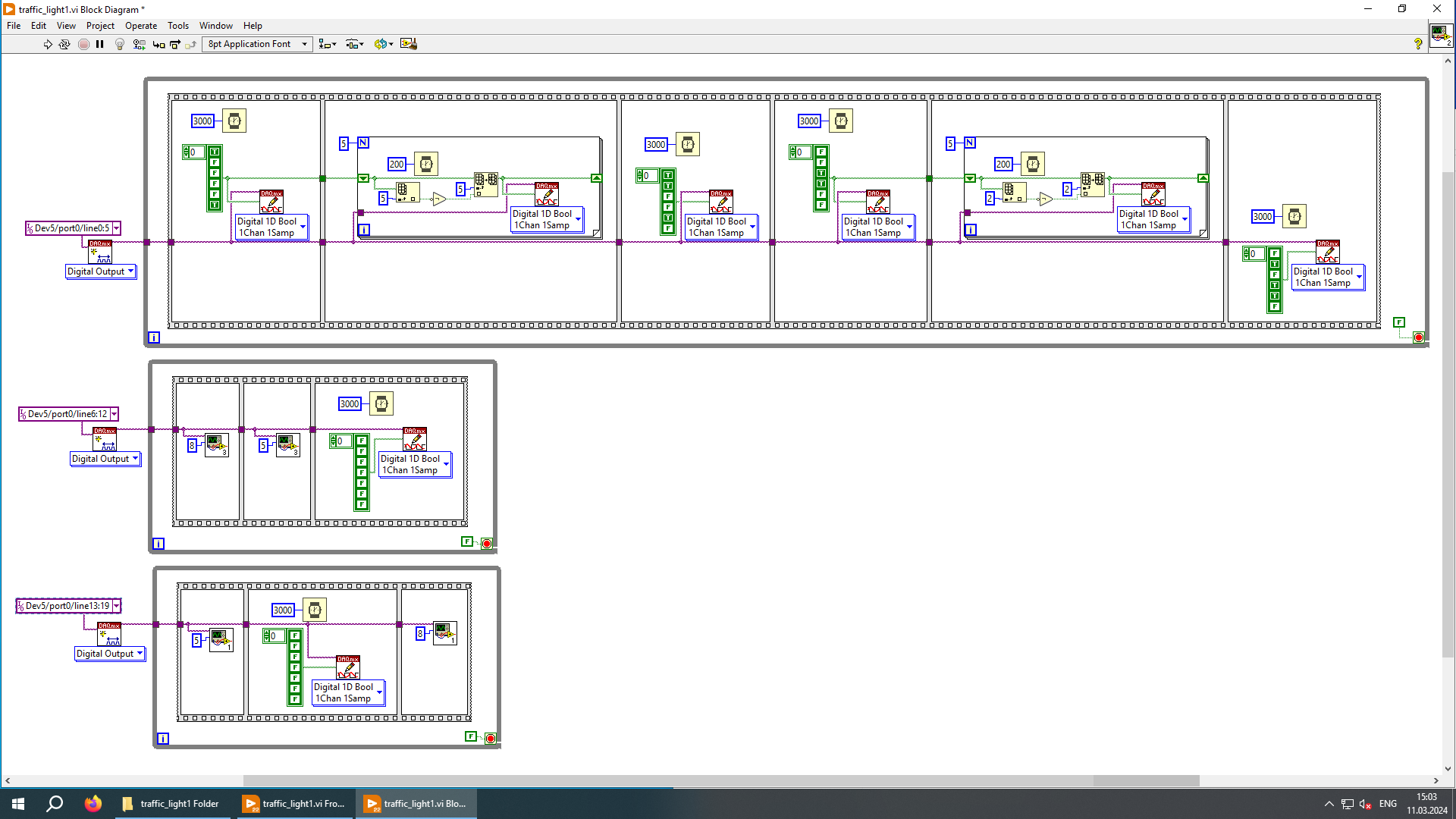
Рисунок 7 Код программы
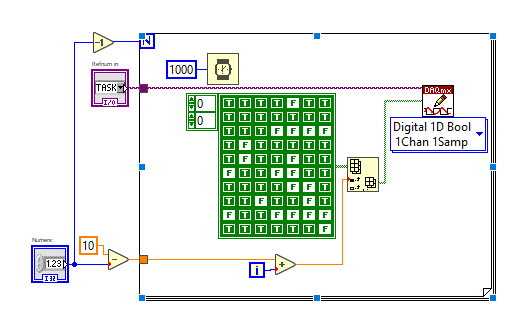
Рисунок 8 Функция indicator
Результат:

Рисунок 9 Результат работы
Выводы.
В ходе выполнения лабораторной работы мы ознакомились с драйвером DAQmx., была написано программа управления светофорами на регулируемом Т-образном перекрёстке