

Лабки-лапки / Lab_4_2
.docxМИНОБРНАУКИ РОССИИ
САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ
ЭЛЕКТРОТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
«ЛЭТИ» ИМ. В.И. УЛЬЯНОВА (ЛЕНИНА)
Кафедра КСУ
ОТЧЕТ
по лабораторной работе № 4
по дисциплине «Моделирование систем управления»
Тема: . ИССЛЕДОВАНИЕ ЛИНЕАРИЗОВАННОЙ МАТЕМАТИЧЕСКОЙ МОДЕЛИ
Вариант 2
Студенты гр. 1487 |
|
Томозов Г. Н. Сластин Н. Ю. |
Преподаватель |
|
Лукомская О. Ю. |
Санкт-Петербург
2025
Цель: Провести линеаризацию СНДУ в окрестности статического режима, получить линеаризованную математическую модель, описывающую динамику системы при малых отклонениях входных переменных от рассматриваемого статического режима; исследовать линеаризованную модель на ее соответствие нелинейной модели; исследовать устойчивость системы и характер переходных процессов.
Исходные данные:
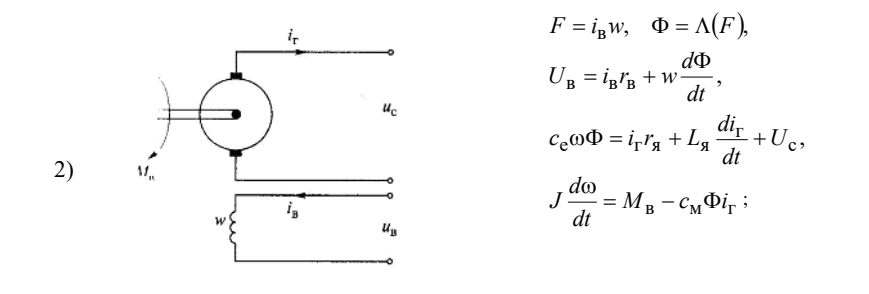
Таблица 1. Параметры объектов моделирования
![]()
![]()
Таблица 2. Входные, выходные и нормировочные параметры
![]()
![]()
Таблица 3. Кривые намагничивания.


Матрица состояния определяется следующим образом:

Аналогичным образом определяются:
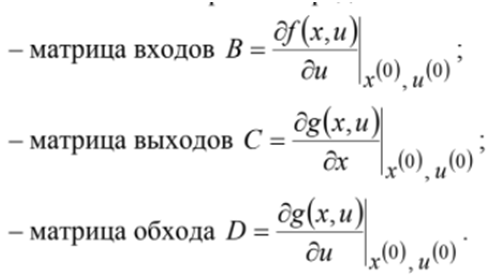



B=
Матрица выхода:



Рис.1 – Схема Simulink

Рис.2 – Подсистема Simulink линеаризованной системы
z
Рис.3 – Подсистема Simulink нелинейной системы
Код программы:
J = 0.12;
wn = 100;
Cm = 200;
potokn = 0.005;
In = 50;
Mvn = 70;
Lya=0.01;
Ucn = 220;
Uvn = 220;
Ce = 205;
ra = 0.3;
w = 4000;
rb = 145;
rv = 145;
Fn = (Ucn*w)/rv;
rw = 145;
rja = 0.3;
w = 4000;
Lja = 0.01*1000;
R0 = 4;
ce = 205;
cm = 200;
J = 0.35;
Fn = 0.007;
Wn = 100;
in = 50;
Mvn = 70;
Uvn = 220;
F = Uvn/rw*w;
a11 = 1/(w*Fn)*(-rw*F/w);
a12 = 1/(w*Fn)*Uvn;
a21 = 1/(Lja*in)*ce*Fn*Wn;
a22 = 1/(Lja*in)*(-in*rja);
a23 = 1/(Lja*in)*(-in*R0);
a31 = 1/(J*Wn)*Mvn;
a32 = 1/(J*Wn)*(-cm*Fn*in);
c5 = 0.7479; c3 = -0.1896; c1 = 0.5022;
u1 = 1; u2 = 1; u3 = 1;
x10 = 0.983; x20 = 1.018; x30 =1.55;
A11=a11*(5*c5*x10^4+3*c3*x10^2+c1);
A12=0;
A13=0;
A21=a21*x30;
A22=a22+a23*u3;
A23=a21*x10;
A31=a32*x20;
A32=a32*x10;
A33=0;
B11=a12;
B23=a23*x20;
B32=a31;
x100=0.983;
x200=1.018;
x300=1.55;
u1=1;
u2=1;
u3=1;
du1=u1-u1;
du2=u2-u2;
du3=u3-u3;
Дальше всё из примера там не по нашему варику
Переходные процессы для различных режимов в сравнении с нелинейной системой из ЛР №2

Рис.1 Переходные процессы при отклонении от номинального режима по Uc на -20% для величины Ф.

Рис.2 Переходные процессы при отклонении от номинального режима по Uc на -20% для величины ir.

Рис.3 Переходные процессы при отклонении от номинального режима по Uc на -20% для величины w.
График расположения корней полинома на комплексной плоскости представлен на рис. 4:
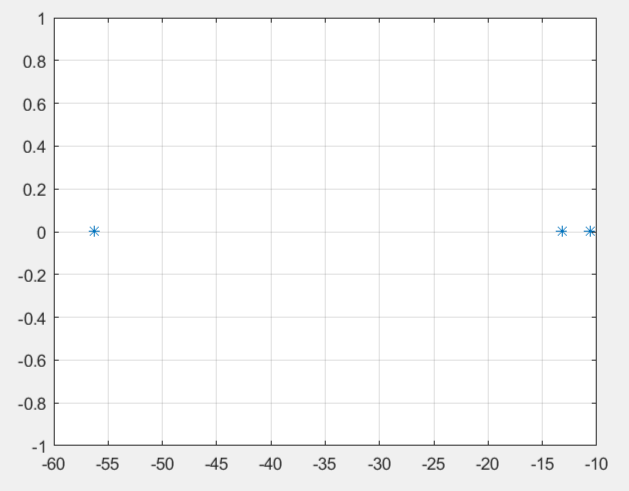
Рис.4 Корни ХП
Как видно из рис. 4, у всех корней вещественная часть находиться в левой полуплоскости, что говорит об асимптотической устойчивости системы.
Численные показатели матриц частных производных:




Выводы:
В ходе лабораторной работы была проведена линеаризация СНДУ в окрестности статического режима, в результате которой была получена матрица математической модели. По полученным переходным процесса можно сказать о соответствии линеаризованной модели нелинейной в окрестности статического режима. По найденным корням характеристического полинома матрицы A можно сказать, что система устойчива.