

МИНОБРНАУКИ РОССИИ
САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ
ЭЛЕКТРОТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
«ЛЭТИ» ИМ. В.И. УЛЬЯНОВА (ЛЕНИНА)
Кафедра КСУ
КУРСОВАЯ РАБОТА
по дисциплине «Моделирование систем управления»
Тема: Моделирование электромеханических систем средствами MATLAB
Вариант 2
Студенты гр. 1487 |
|
Сластин Н. Ю. Томозов Г. Н. |
Преподаватель |
|
Лукомская О.Ю. |
Санкт-Петербург
2025
ЗАДАНИЕ
НА КУРСОВУЮ РАБОТУ
Студенты: Томозов Г. Н. и Сластин Н. Ю. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Группа 1487 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Тема работы : Исследования и моделирования линейных и нелинейных динамических систем на примере электрических машин постоянного тока. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Исходные данные: Ниже в таблицах и на рисунках приведены исходные данные по электрическим машинам (ЭМ).
Таблица 1. Параметры объектов моделирования
Таблица 2. Входные, выходные и нормировочные параметры
Таблица 3. Кривые намагничивания
В таблице 3 значения F поделены на 4000.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Содержание пояснительной записки: Титульный лист, решение заданий согласно рассматриваемой процедуре моделирования системы управления , аннотация и содержание, введение, приложение, заключение по курсовой работе и источники литературы. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Предполагаемый объем пояснительной записки: Не менее 34 страниц. Дата выдачи задания: Дата сдачи работы: Дата защиты работы:
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Аннотация
В ходе работы рассматриваются базовые процедуры исследования и моделирования линейных и нелинейных динамических систем на примере электрических машин постоянного тока.
Приведены теоретические основы анализа динамических систем, и моделирование электрических машин проводится в среде MATLAB.
SUMMARY
In the course of the work, the basic procedures for research and modeling of linear and nonlinear dynamic systems are considered on the example of direct current electric machines. The theoretical foundations of the analysis of dynamic systems are given, and the simulation of electrical machines is carried out in the MATLAB environment.
Оглавление
ВВЕДЕНИЕ 6
1. АППРОКСИМАЦИЯ ОБРАТНОЙ КРИВОЙ НАМАГНИЧИВАНИЯ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ НА ОСНОВЕ МЕТОДА НАИМЕНЬШИХ КВАДРАТОВ 8
3. ИССЛЕДОВАНИЕ СТАТИЧЕСКИХ РЕЖИМОВ ДИНАМИЧЕСКОЙ СИСТЕМЫ 34
ЗАКЛЮЧЕНИЕ 48
В данной курсовой работе было проведено исследование математической модели генератора постоянного тока независимого возбуждения. 48
В первую очередь была получена непрерывная функция, аппроксимирующая обратную кривую намагничивания на основе метода наименьших квадратов. 48
Были построены переходные процессы динамической системы с учетом изменения входного воздействия. 48
С использованием полученного в первом пункте нормированного полинома пятой степени, были исследованы статические режимы динамической системы при помощи метода Ньютона. 48
Сравнение переходных процессов в нелинейной и линеаризованной системах подтвердило корректность линеаризации при малых отклонениях. 48
Частотные характеристики показали, что коэффициенты передачи линеаризованной системы и рассчитанные через передаточную функцию сходятся с точностью до сотых. Система является устойчивой, а переходные процессы носят колебательный характер. 48
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ 49
ПРИЛОЖЕНИЕ 50
Введение
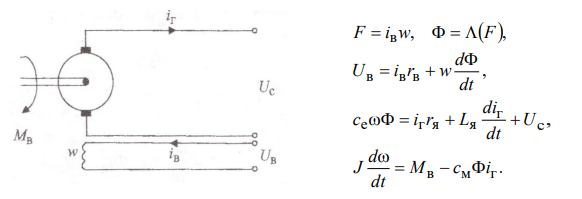
Рассмотрим математическую модель электрической машины на примере ГПТ НВ, работающего на сеть большой мощности.
Динамику объекта описывает следующая система уравнений:
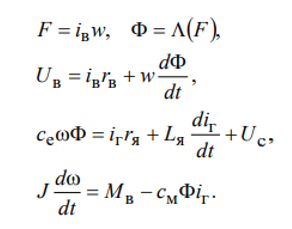
где
![]() - число витков обмотки независимого
возбуждения;
- число витков обмотки независимого
возбуждения;
![]() - сопротивление обмотки независимого
возбуждения; Ф
- магнитный поток; F
-
магнитодвижущая сила (МДС);
- сопротивление обмотки независимого
возбуждения; Ф
- магнитный поток; F
-
магнитодвижущая сила (МДС);
![]() - сопротивление якоря, щеток и т.д.;
- сопротивление якоря, щеток и т.д.;
![]() - индуктивность якоря;
- индуктивность якоря;
![]() - внешний вращающий момент;
- внешний вращающий момент;
![]() - конструктивный коэффициент; J
-
момент инерции якоря;
- конструктивный коэффициент; J
-
момент инерции якоря;
![]() - угловая скорость вращения якоря;
- угловая скорость вращения якоря;
![]() -
кривая
намагничивания электрической машины;
-
кривая
намагничивания электрической машины;
![]() - ток якоря. Размерность всех величин
задана в системе СИ.
- ток якоря. Размерность всех величин
задана в системе СИ.
Численные значения постоянных величин приведены в таблице 1. Нормировочные (номинальные) значения переменных, описывающих динамику объекта приведены в таблице 2. Кривая намагничивания приведена в таблице 3.
Математическая модель включает в себя три дифференциальных и два алгебраических уравнения. В модели присутствуют нелинейности: кривая намагничивания, заданная таблично в промежуточных значениях, а также взаимные произведения переменных состояния между собой или с входными переменными. Таким образом, модель относится к классу систем нелинейных дифференциальных уравнений (СНДУ), а описываемый ею объект является нелинейной динамической системой.
В процессе моделирования электрической машины постоянного тока возникают следующие задачи:
аппроксимация обратной кривой намагничивания;
исследование переходных процессов в системе;
исследование статических режимов динамической системы
исследование линеаризованной математической модели.
Пути решения данных задач с применением среды MATLAB изложены в лабораторных работах №1 – 5.