

1,2 И 3 степени свободы.
Чем сложнее геометрическая фигура, тем большее число степеней свободы у нее.
Базисные функцииsinx/x трудно генерировать, поэтому на практике восстановление непрерывного сообщения по полученным отсчетам выполняется по другим отсчетам, отличным от алгоритма теоремы Котельникова.
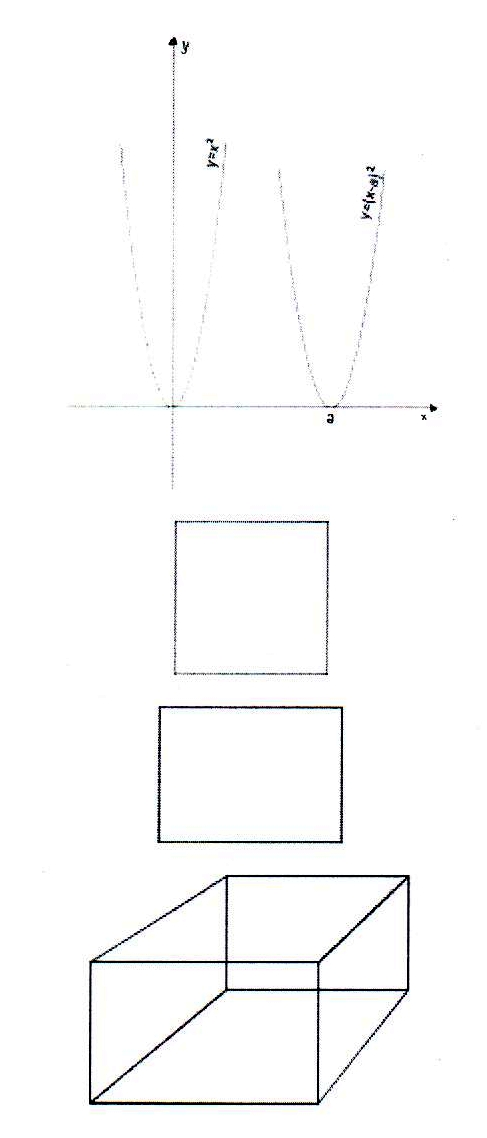
Рисунок.
Чтобы выяснить, какое значение имеет временная функция в момент времени i∆tнужно сложить все составляющие. Из последнего графика видно, что прежде, чем восстанавливать непрерывную функцию λ(t), необходимо получить все ее N отсчетов.
На
практике для обеспечения восстановления
непрерывной функции но мере получения
ее отсчетов используют интервал
дискретизации ∆t,
на передающей стороне, меньший, чем
требуется по теореме Котельникова![]() а на приемной стороне полученные отсчеты
подают на низкочастотны фильтр, с выхода
которого снимается непрерывное сообщение.
а на приемной стороне полученные отсчеты
подают на низкочастотны фильтр, с выхода
которого снимается непрерывное сообщение.

Рисунок.
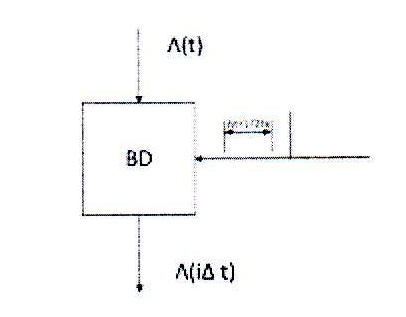
Рисунок.
Полоса пропускания фильтра определяется знамен им частотыfuв спектре передаваемого сообщения.

Рисунок.
Значение теоремы Котельникова
Позволяет осуществить многоканальную передачу сообщений в одном частотном канале связи путем разделения сообщений по времени, то есть между отсчетами одного передаваемого сообщения вставляют отсчеты нескольких других передаваемых сообщений.
Общие сведения об РЛС (радиолокационных системах)
Сингалы, используемые в радиолокации
Видеосигналы
а) Видеоимпульс прямоугольной формы

Рисунок.
![]()

Рисунок.

Рисунок.

- форумла, по которой происходит вычисление АКФ.
tu - длительность импульса.
АКФ показывает степень похожести сигнала S(t) на свою копию, сдвинутую по времени относительно положения сигнала S(t) на интервал времени τ в зависимости от величины этого сдвига τ.
S(t) - сигнал.
S(t-τ) - копия сигнала S(t), сдвинутая на интервал времени τ.
τ = -tu

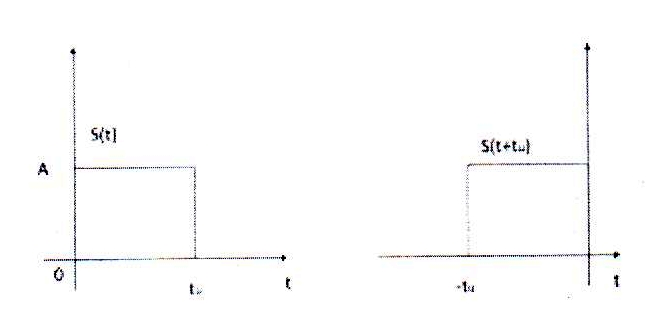
Рисунок.
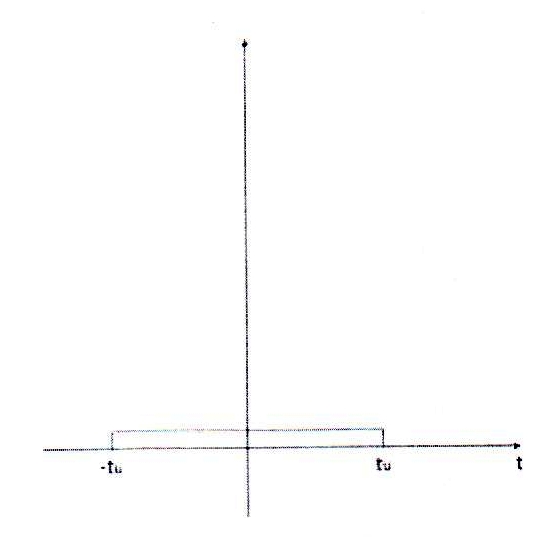
Рисунок.
τ = -tu/2


Рисунок.

Рисунок.

Рисунок.
r = 0


Рисунок.

Рисунок.

Рисунок.
τ = tu/2

Рисунок.

Рисунок.

Рисунок.
b) Видеоимпульс гауссовой формы
Амплитудно-частотный сиктр(АЧС) a и b – декартовой системе координат.


Рисунок. Рисунок.
![]()
![]() (8)
(8)

Рисунок.
c) Реальный видеоимпульс прямоугольной формы.
В реальной природе мгновенный рост от 0 до А и мгновенный спад от А до 0 нереальны.
![]()
![]()

Рисунок


Рисунок Рисунок
![]()
![]()
d)Последовательность видеоимпульсов прямоугольной формы.
2)Радиоимпульсы.


Рисунок Рисунок
а) Радиоимпульсы с прямоугольной огибающей.
![]()
<= t<=

A(t) – огибающая прямоугольной формы (только сверху).
A
– огибающая сигнала.
![]()
ƒ – частота заполнения.
Спектр сплошной и бесконечный.
Чем длиннее сигнал S(5),тем хуже его спектр.
При


Рисунок Рисунок
b) Последовательность радиоимпульсов прямоугольной формы.



Рисунок Рисунок
3) Сложные сигналы
Отличаются
от простых наличием внутриимпульсной
частотной или фазовой модуляции. В
результате чего их база ![]() оказывается много больше единицы. База
простых сигналов
оказывается много больше единицы. База
простых сигналов ![]()
Сложные сигналы качественно отличаются от простых.
1.ЛЧМ
сигнал(сигнал с линейной частотной
модуляцией) ![]() -
девиация частоты.
-
девиация частоты.
Автокорреляционная Функция ЛЧМ сигнала.


Рисунок. Рисунок
АКФ ЛЧМ стгнала содержит центральный лепесток и боковые лепестки, которые существенно меньше по амплитуде, чем центральный. Длительность центрального лепестка
![]()
Щирина спектра
АЧМ сигнала определяется девиацией
частоты ![]() и
не зависит от длительности сигнала.
и
не зависит от длительности сигнала.
Рисунок.

Рисунок
2.ФМ сигналы (фазоманипулированные сигналы).
Внутри импульса меняется частота фазы заполнения.
В качестве примера рассмотрен сложный ФМ сигнал с семи элементным кодом Баркера.
Высота всех цоковых
треугольников ![]() (в 7 раз меньше, чем высота центрального
лепестка).
(в 7 раз меньше, чем высота центрального
лепестка).
Сложные сигналы позволяют различить два противоречия, которые не могут различить простые сигналы:
Они позволяют иметь одновременно хорошую разрешаюшую способность РЛС по длительности и скорости.
Позволяют одновременно иметь большую дальность действия РЛС и высокое разрешение по дальности.
Принятые и отраженные от цели сигналы (сложные) усиливаются приемником, которые не изменяют их формы. Затем с выхода приемника сигналы попадают на согласованный фильтр, задача которого максимизировать отношения сигнал-шум на своём выходе в момент окончания приема сигнала. Сигнал на выходе согласованного фильтра является разверткой по времени АКФ принятого сигнала. Максимизация отношения сигнал-шум сигнала нужна для того, чтобы увеличить вероятность правильного обнаружения целей и точность измерения координат.


Рисунок Рисунок

Рисунок