Тмм-2
.docxМинистерство образования Российской Федерации
Липецкий государственный технический университет
Кафедра: общей механики
Практическое задание № 2
По дисциплине: «Теория механизмов и машин»
На тему: «План положений плоского рычажного механизма»
Выполнил: студент группы ТК-18-1 __________ .
подпись Ф.И.О
Проверил: ст. преподаватель __________
подпись Ф.И.О
Липецк 2020 год.
Вариант №3
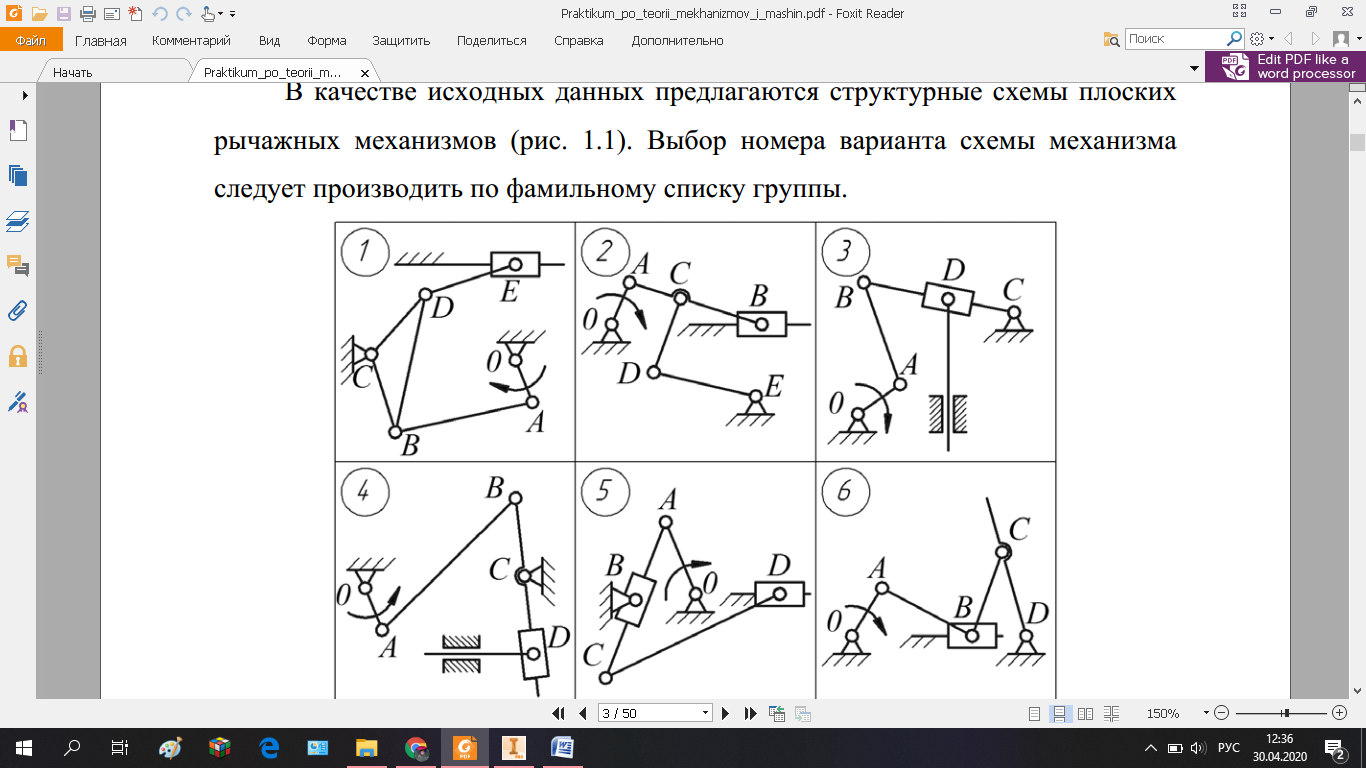
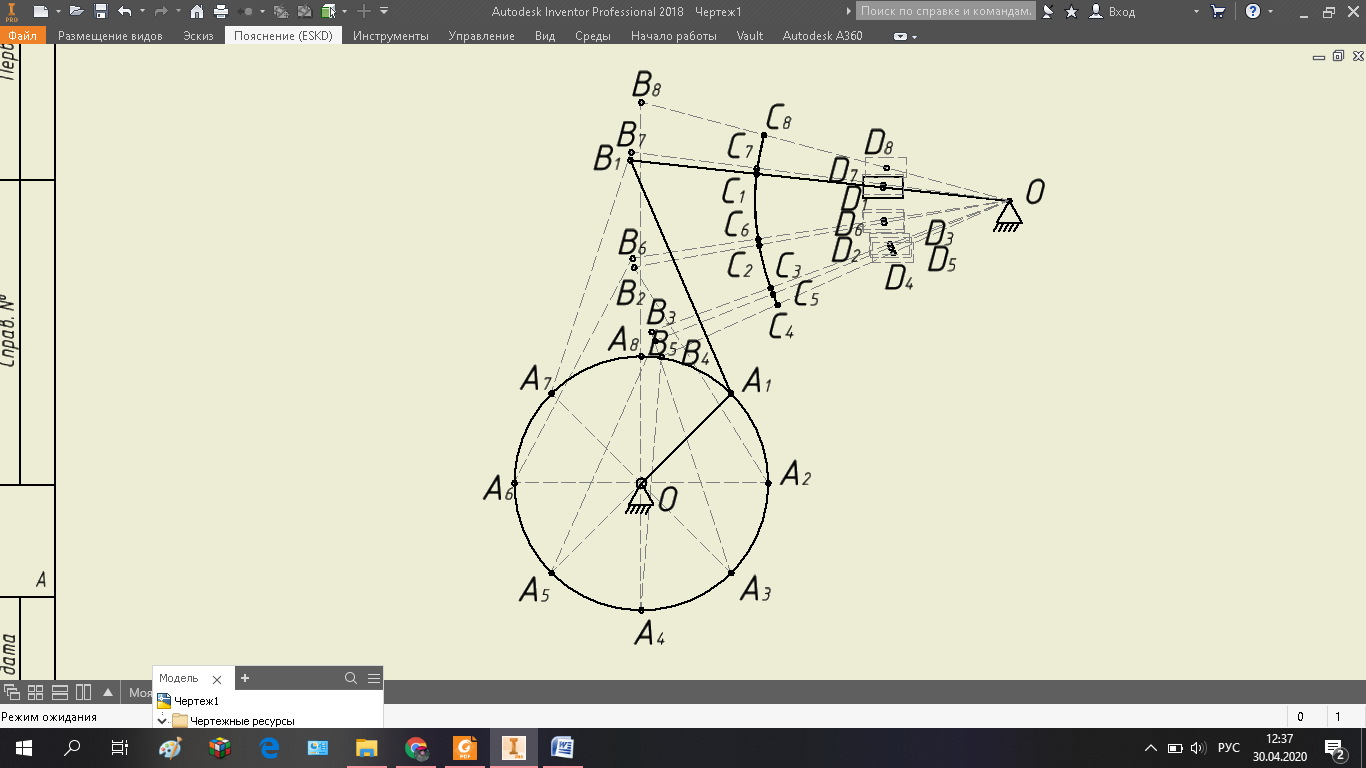
Построим план положений кривошипно-ползунного механизма. Задаёмся крайним положением кривошипа (кривошип и шатун располагаются на одной линии). Делим окружность радиуса ОА на равные части. Из точек деления (А1, А2, …B1, B2) делаем засечки на оси движения ползуна (D1,D2 ...) радиусом, равным длине шатуна. Соединяем одноимённые точки (А1 и B1, А2 и B2... B1 и D1, B2 и D2...). Найденные положения точки D определяют положение поршня (ползуна). Точки C1, C2 … (центры отрезков B1D1, B2D2, …), соединенные линией, являются траекторией центра кулисы ВD.
Длины звеньев 0А, АВ и BD равны 25 мм, 50мм и 50мм соответственно.