

Конспект лекций по дисциплине КТВП Медведев 9587
.docxКонспект лекций по дисциплине «Компьютерные технологии в приборостроении»
Выполнил студент группы 9587 Медведев Глеб
Лекция 07/09
Прибор – посредник между реальным и информационным миром.
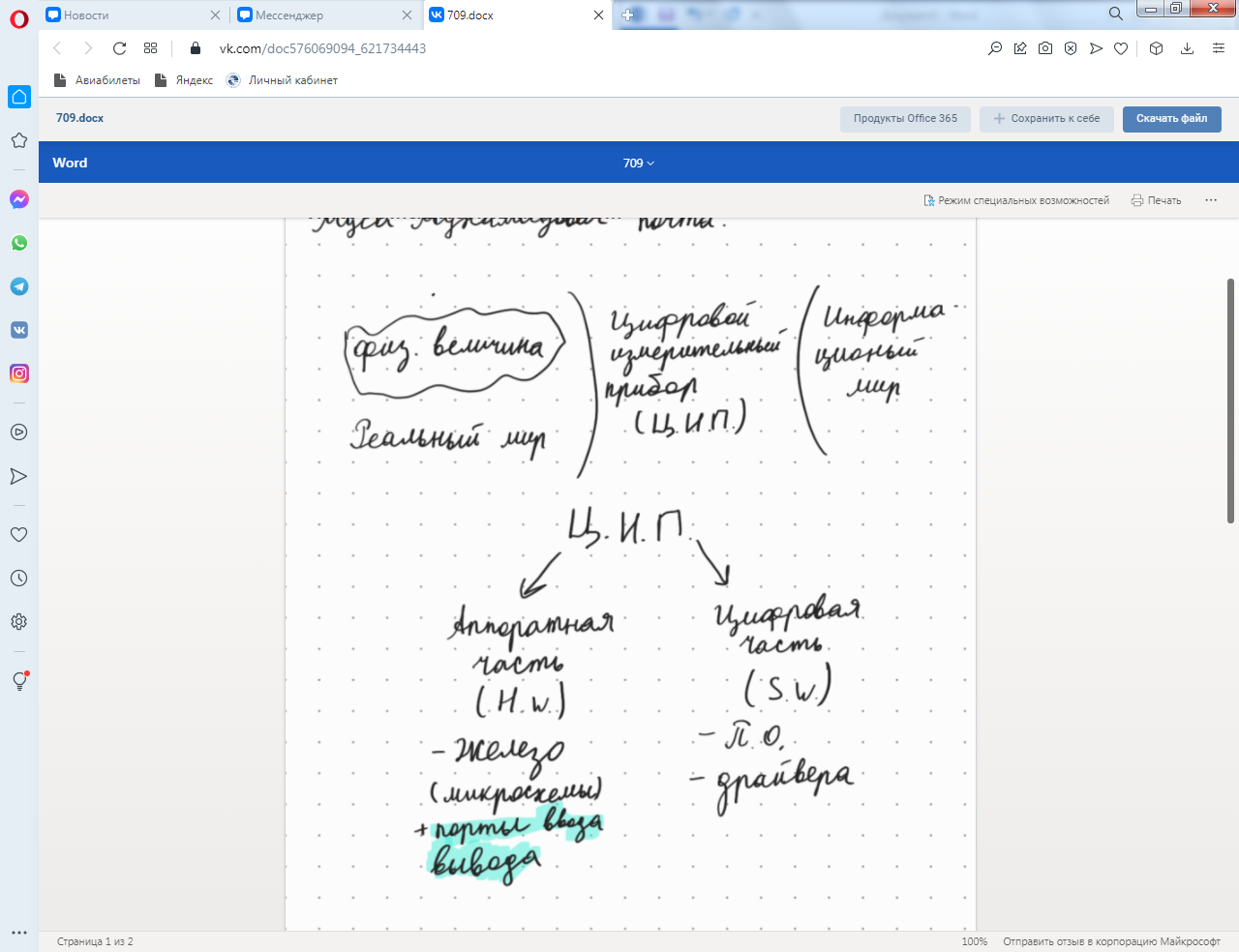
Информация в реальном мире – физическая величина, представлена в аналоговом виде, цифровой измерительный прибор (ЦИП) позволяет преобразовать ее в цифровой вид.
ЦИП - это измерительный прибор, в котором входной сигнал - значения непрерывной величины (напряжения, силы тока, электрического сопротивления, давления, температуры и др.), преобразуется в дискретный выходной сигнал и представляется в цифровой форме. Под дискретным сигналом понимают прерывистый сигнал, в котором информация содержится не в интенсивности носителя сигнала, а в числе элементов сигнала и их взаимном расположении во времени или пространстве. В состав цифровых измерительных приборов обязательно входит аналого-цифровой преобразователь, преобразующий аналоговый сигнал, полученный датчиком, в цифровой код. Для цифровых измерительных приборов характерна значительно более высокая точность измерения, удобство и объективность отсчёта по сравнению с аналоговыми измерительными приборами.
К основным характеристикам цифровых измерительным приборов относятся:
погрешности;
диапазон измерений - это область значений измеряемой величины, для которой нормированы допускаемые погрешности;
входное сопротивление прибора - влияет на потребляемую от измеряемой цепи энергию U, в конечном итоге, на результат измерения;
порог чувствительности - наименьшее изменение измеряемой величины, вызывающее изменение показаний прибора, характеризует возможность прибора измерять малые значения и малые приращения измеряемой величины;
быстродействие - определяется максимальным интервалом времени, необходимым для выполнения одного цикла измерения для ЦИП и преобразования входной величины для АЦП;
помехоустойчивость - способность ЦИП снижать действие помех на результат измерения.
Составляющие погрешности обусловлены несовершенством прибора, то есть относятся к инструментальной погрешности; составляющая погрешности квантования - к методической погрешности. Погрешность возникает от несоответствия принятых и реальных значений уровней квантования, так как измеряемая величина квантуется в соответствии с реальными значениями уровней, а отсчет производится в соответствии с принятыми значениями. Погрешность возникает от наличия порога чувствительности (порога срабатывания). Погрешность чувствительности возникает в следствии неидеальности сравнивающего устройства.
Схема устройства ЦИП:
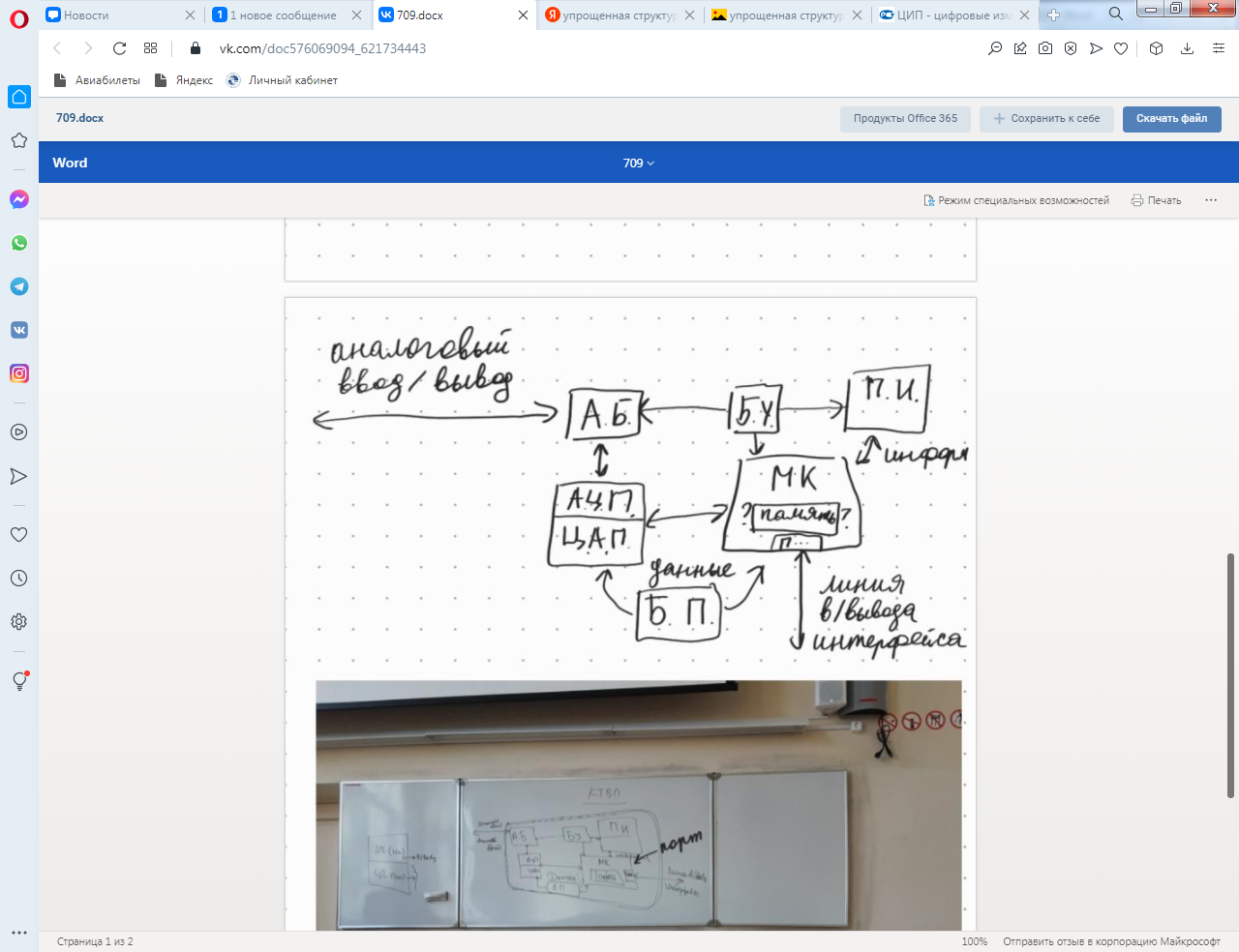
В упрощенном виде схема устройства ЦИП выглядит так:
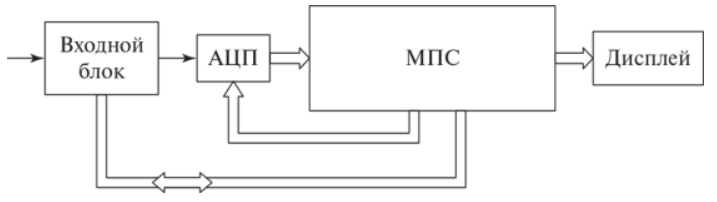
Входной блок производит масштабное преобразование сигнала (ослабляет его). Затем сигнал поступает на аналогово-цифровой преобразователь (АЦП), где аналоговый сигнал преобразуется в соответствующий код. АЦП должны обладать высоким быстродействием, определяемым скоростью изменения, измеряемой величины. Микропроцессорная система обеспечивает управление процессом измерения, обработку сигналов, самодиагностику, а также выдачу результата измерения на дисплей в цифровом виде.
Лекция 21/09
Общая структурная схема измерительного канала:
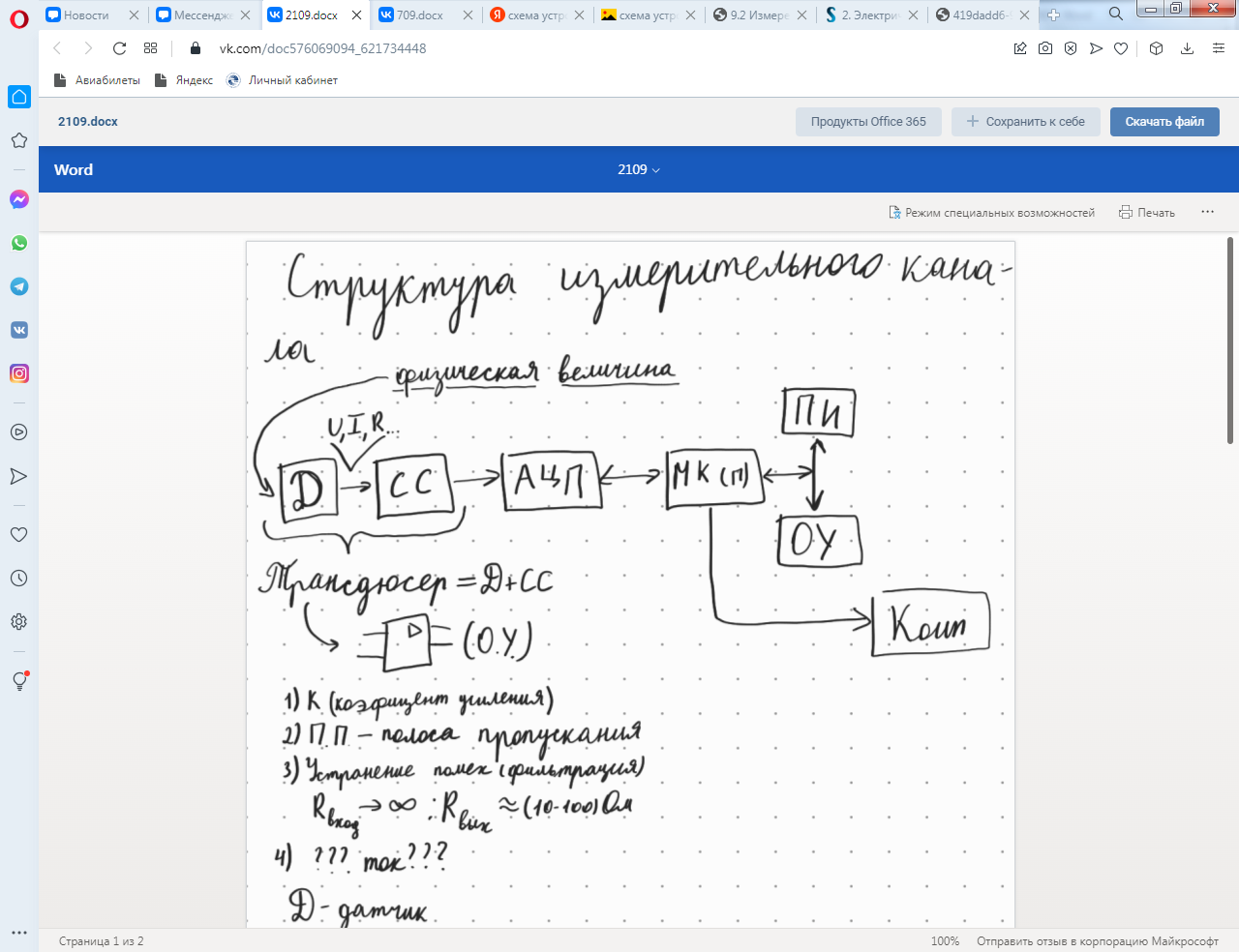
Трансдюсер состоит из датчика (D), который на основе физического явления генерирует электрический сигнал, и блока согласования (СС), который обеспечивает согласование сигнала по амплитуде, усиливает его, если необходимо, или по частоте, реализуется с помощью различных фильтров, далее идёт обработка сигнала и представление его в различных формах.
Параметры датчика: К – коэффициент усиления, ПП – полоса пропускания, фильтрация – устранение сигналов.
Датчик может быть оснащен Wi-Fi, Bluetooth, интернет соединением и соединением с локальной сетью.
Оцифровка происходит после поступления на АЦП аналогового сигнала для дальнейшей его обработки и запоминания. Этапы оцифровки сигнала:
1) дискретизация – это преобразование непрерывного сигнала в последовательность чисел (отсчетов), то есть представление этого сигнала по какому-либо конечномерному базису;
2) квантование — разбиение диапазона отсчётных значений сигнала на конечное число уровней и округление этих значений до одного из двух ближайших к ним уровней.
Сигнал, к которому применены дискретизация и квантование, называется цифровым.
Лекция 28/09
Логические элементы цифровых измерительных приборов делятся на комбинационные и последовательные по схемному решению и характеру связи между входными и выходными переменными с учётом их изменения по тактам работы.
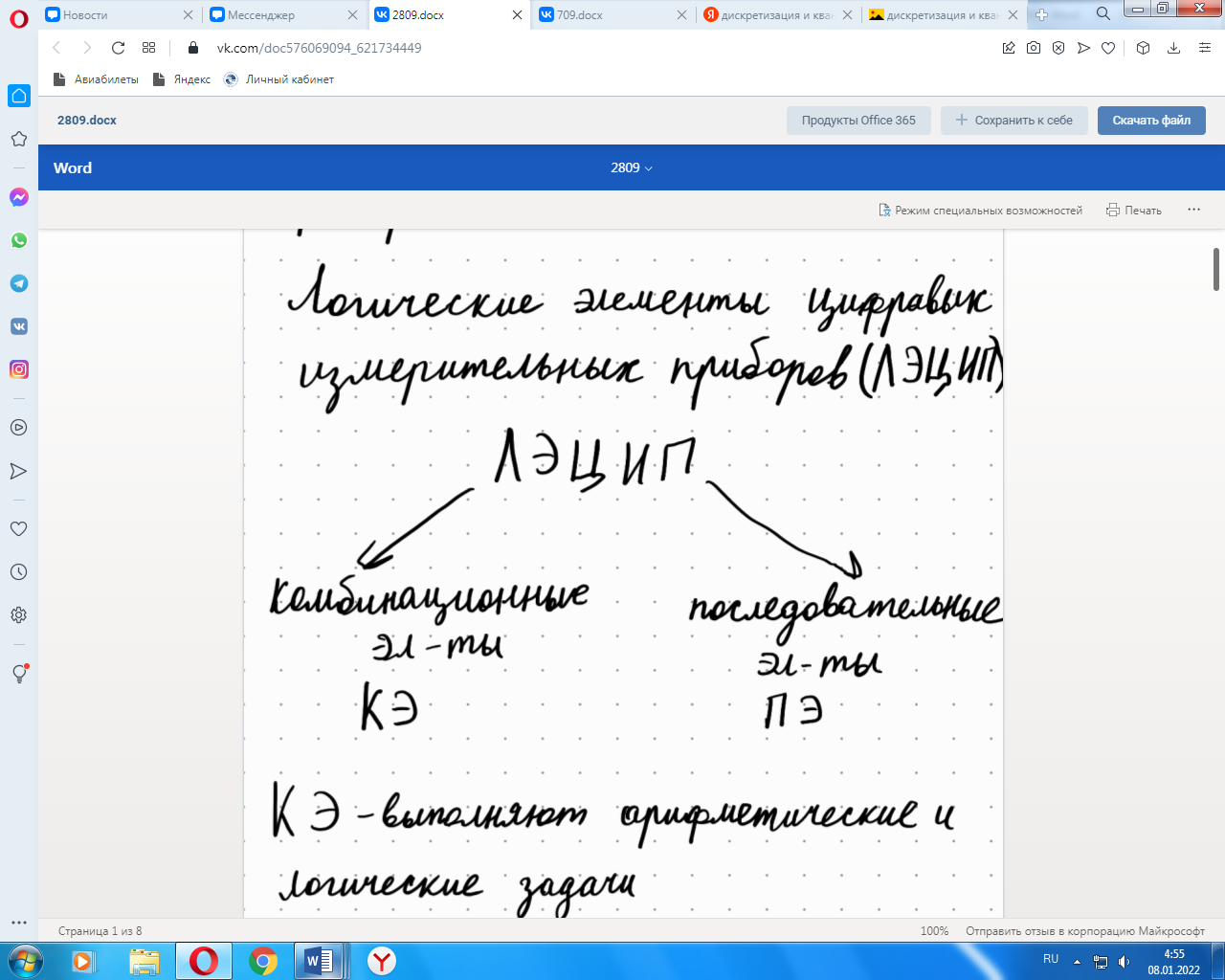
Комбинационными называются такие логические устройства, выходные сигналы которых однозначно определяются входными сигналами.
Последовательными называют такие логические устройства, выходные сигналы которых определяются не только сигналами на входах, но и предысторией их работы, то есть состоянием элементов памяти.
КЭ выполняют логические и арифметические операции:
1) Элемент «И» функция логического умножения
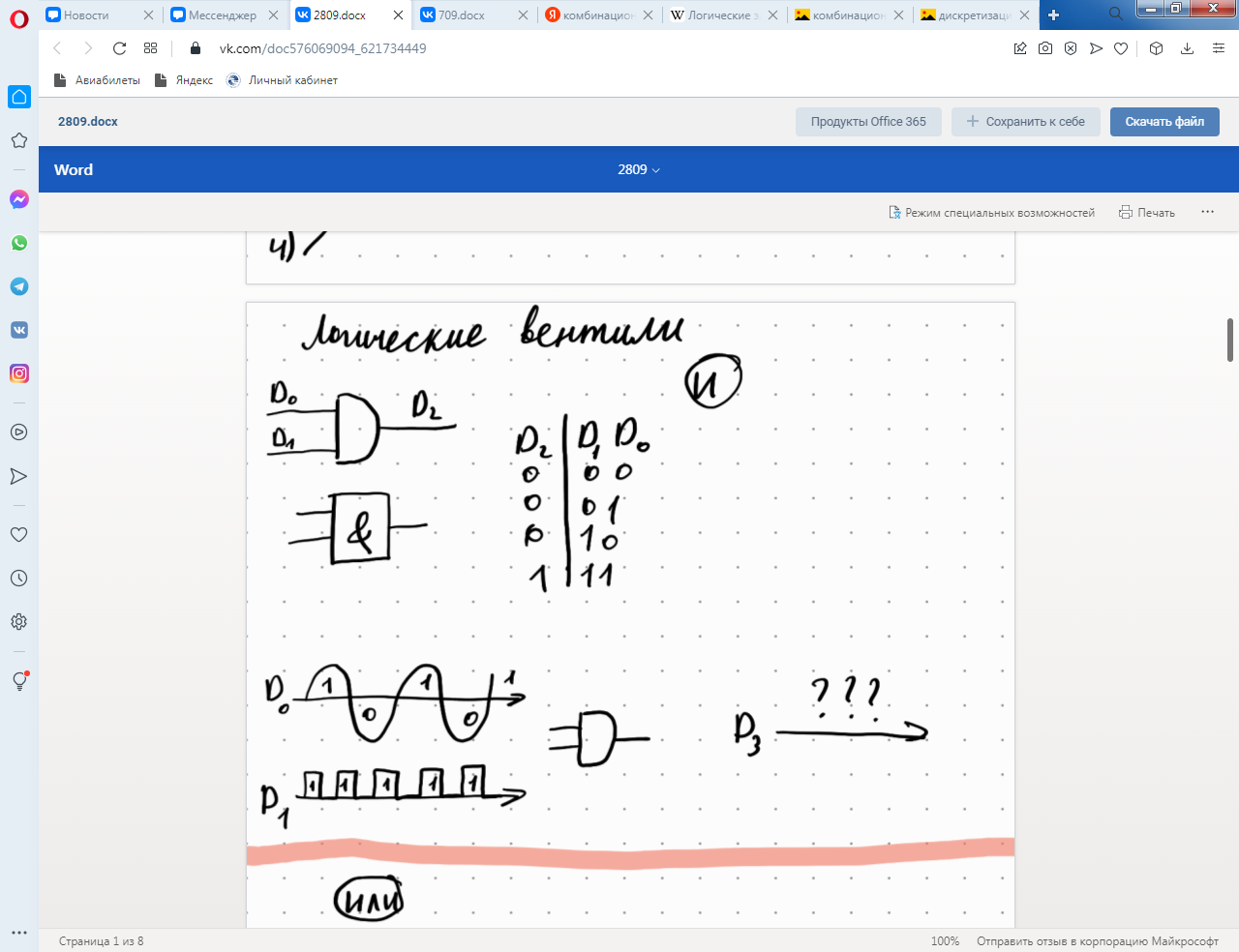
D0 |
D1 |
D2 |
0 |
0 |
0 |
0 |
1 |
0 |
1 |
0 |
0 |
1 |
1 |
1 |
2) Элемент «ИЛИ» функция логического сложения
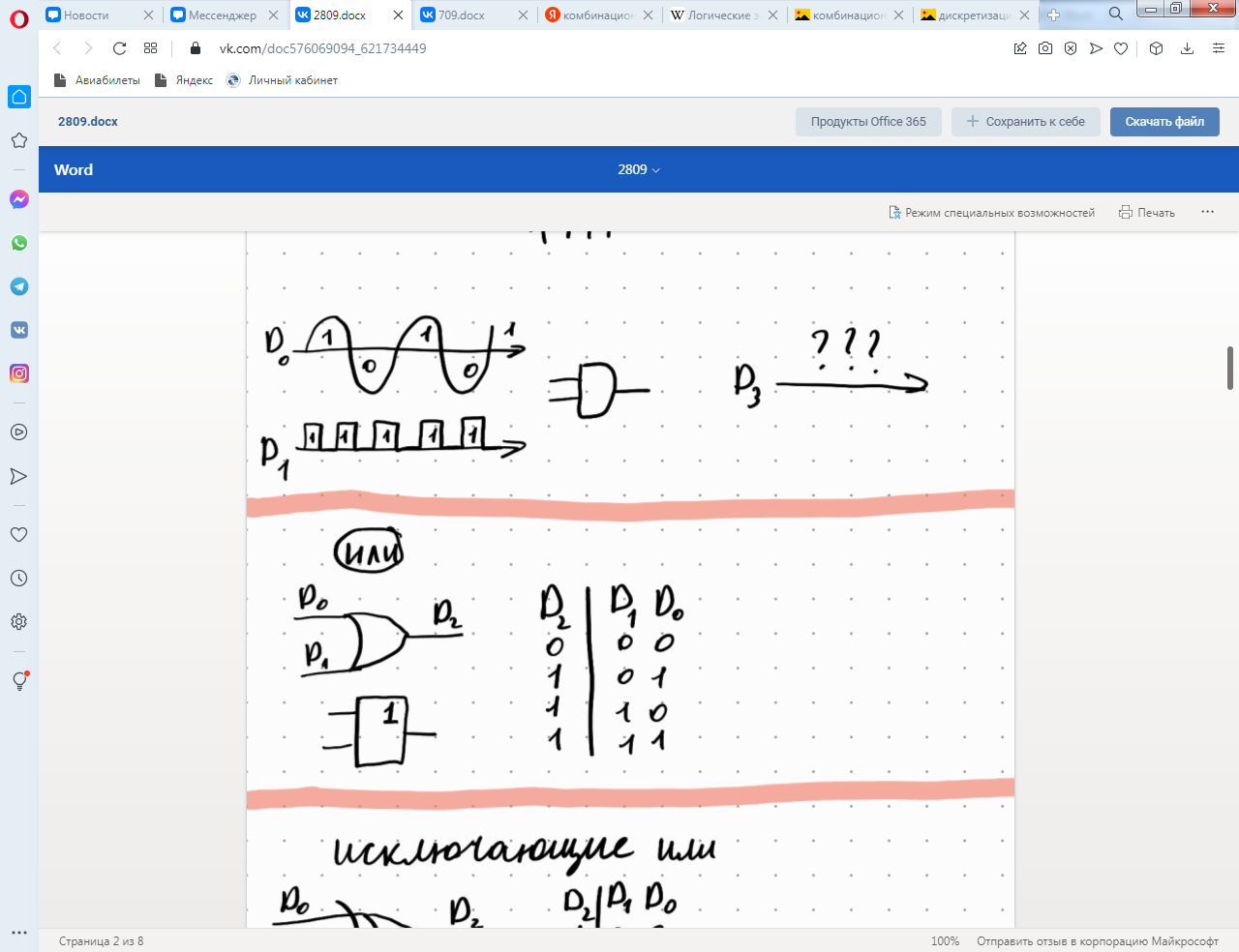
D0 |
D1 |
D2 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
0 |
1 |
1 |
1 |
1 |
3) Элемент «Исключающее ИЛИ»

D0 |
D1 |
D2 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
0 |
1 |
1 |
1 |
0 |
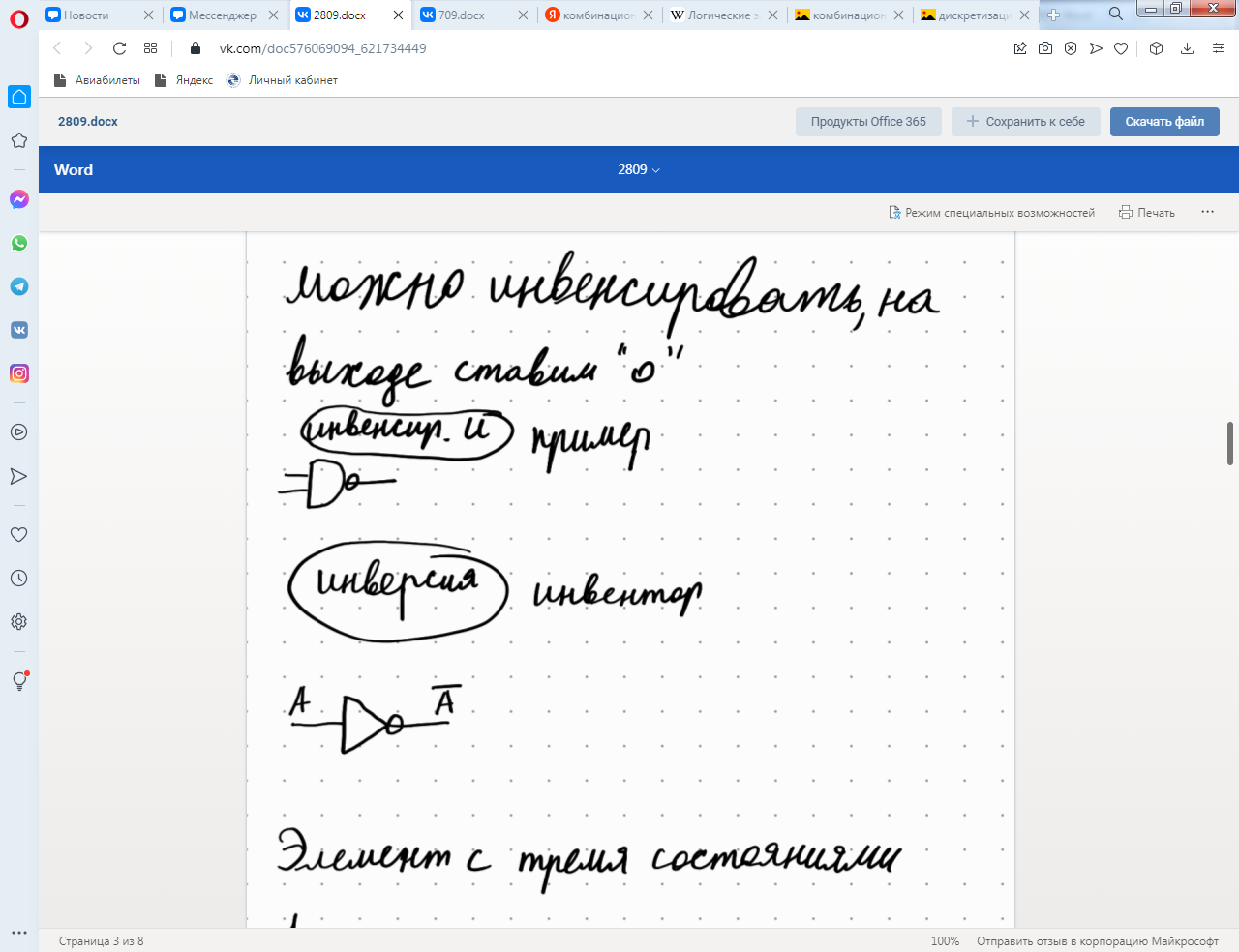
4) Элемент «НЕ» функция отрицания
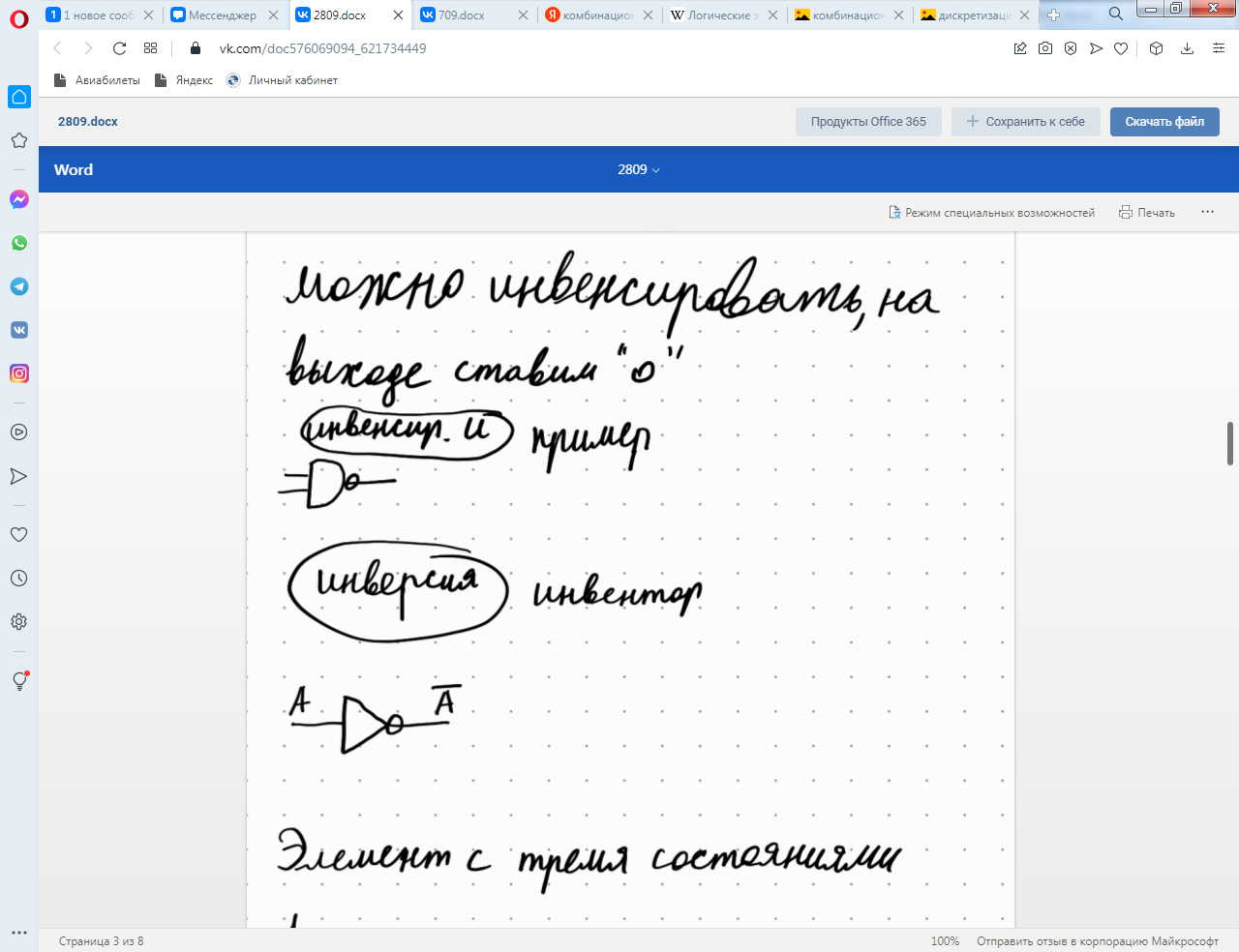
-
A
A
0
1
1
0
5) Элемент «НЕ-И» функция логического отрицания элемента «И» (с «ИЛИ» аналогично)
D0 |
D1 |
D2 |
0 |
0 |
1 |
0 |
1 |
1 |
1 |
0 |
1 |
1 |
1 |
0 |
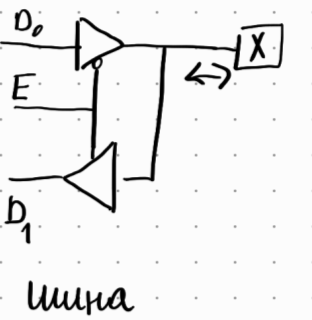
Элемент с тремя состояниями
Во всех шинах цифровых приборов есть этот элемент.
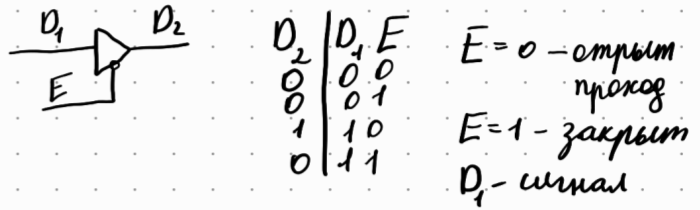
D1 |
D2 |
Е |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
0 |
0 |
1 |
1 |
Е = 0 – открыт проход
Е = 1 – закрыт
Элементы с тремя состояниями
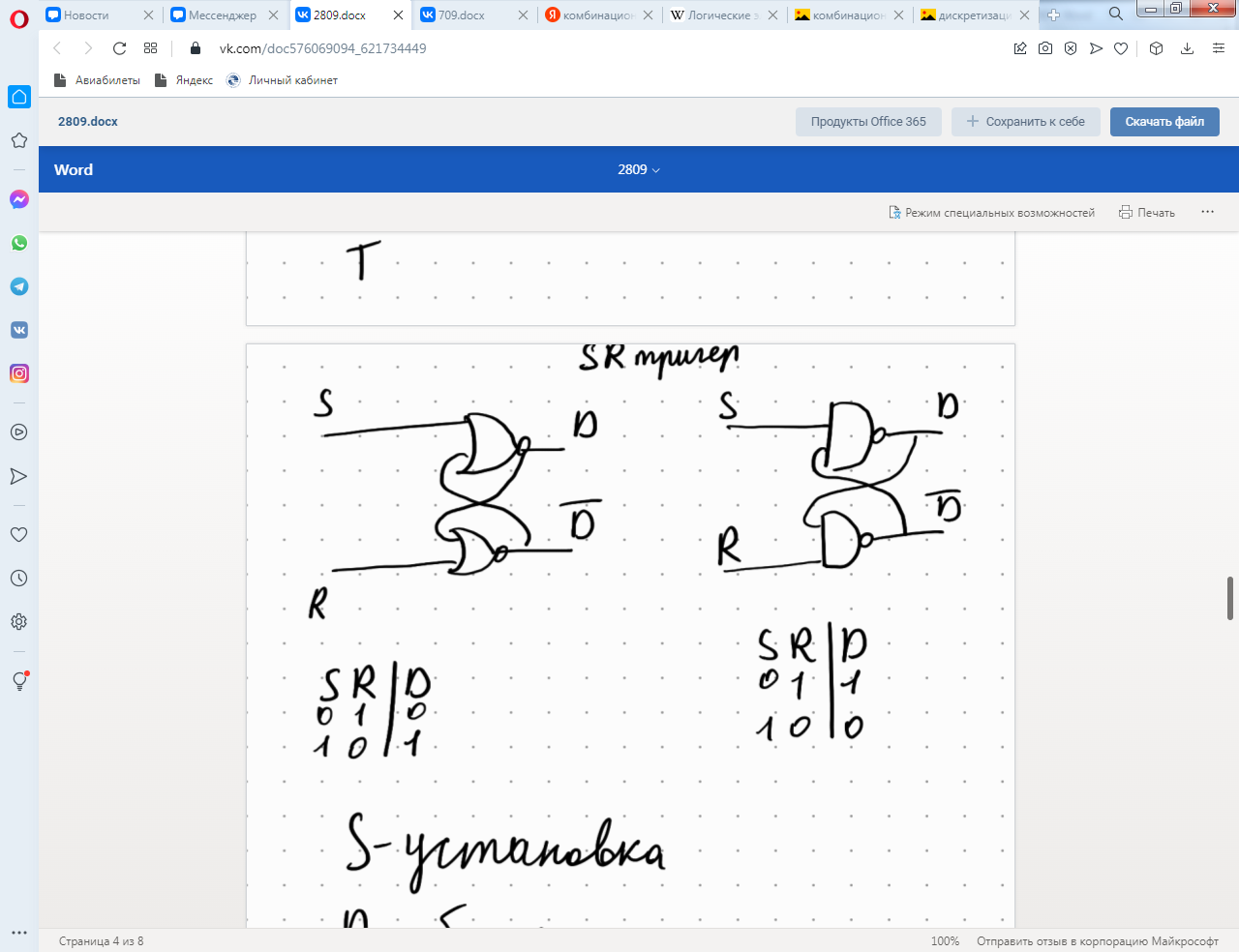
Триггеры бывают четырех видов: SR, D, Т, J-K
SR-триггер
S – установка, R – сброс.
SR-триггер - триггер, который не изменяет значение на выходе при нулевых входах. При наличии ненулевого значения на входе «S», это значение копируется на выход. А при наличии ненулевого значения на входе «R» выходное состояние становится равным нулю.
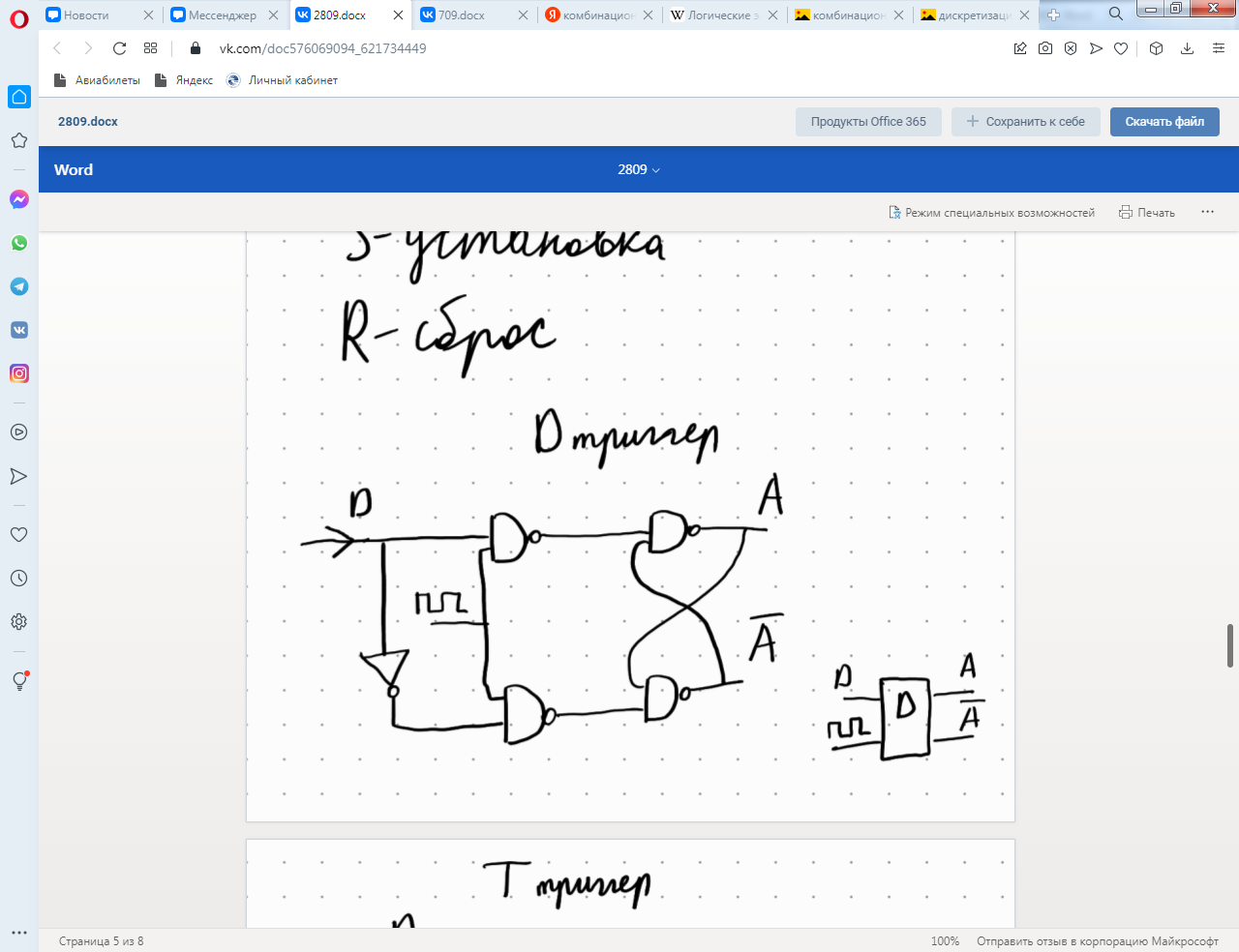
D-триггер
D-триггером называется триггер с одним информационным входом, работающий так, что сигнал на выходе после переключения равен сигналу на входе D до переключения. Основное назначение D-триггеров - задержка сигнала, поданного на вход D.
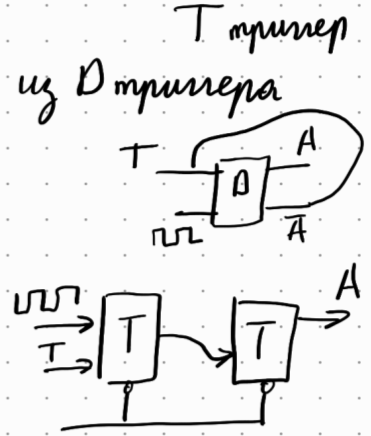
Т-триггер
T-триггер — это счетный триггер. У данного триггера имеется только один вход. Принцип работы T-триггера заключается в следующем. После поступления на вход T импульса, состояние триггера меняется на прямо противоположное. Счётным он называется потому, что T триггер как бы подсчитывает количество импульсов, поступивших на его вход. Жаль только, что считать этот триггер умеет только до одного. При поступлении второго импульса T-триггер снова сбрасывается в исходное состояние.
Делит частоту на 2n, где n – количество Т.
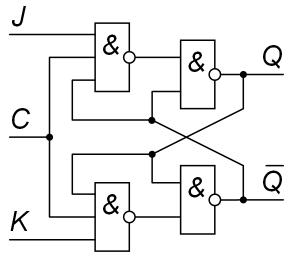
JK-триггер
JK-триггеры подразделяются на универсальные и комбинированные. Универсальный JK-триггер имеет два информационных входа J и K. По входу J триггер устанавливается в состояние Q=1, /Q=0, а по входу K-в состояние Q=0, /Q=1. Универсальность JK-триггера состоит в том, что он может выполнять функции RS-, Т- и D-триггеров. Комбинированный JK-триггер отличается от универсального наличием дополнительных асинхронных входов S и R для предварительной установки триггера в определенное состояние (логической 1 или 0).
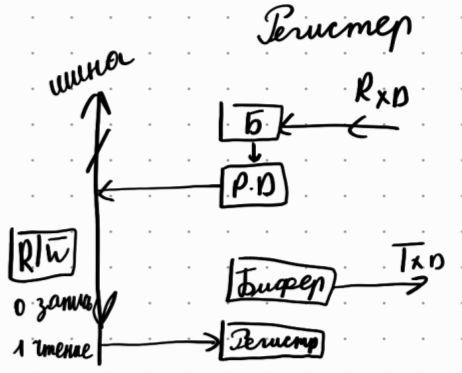
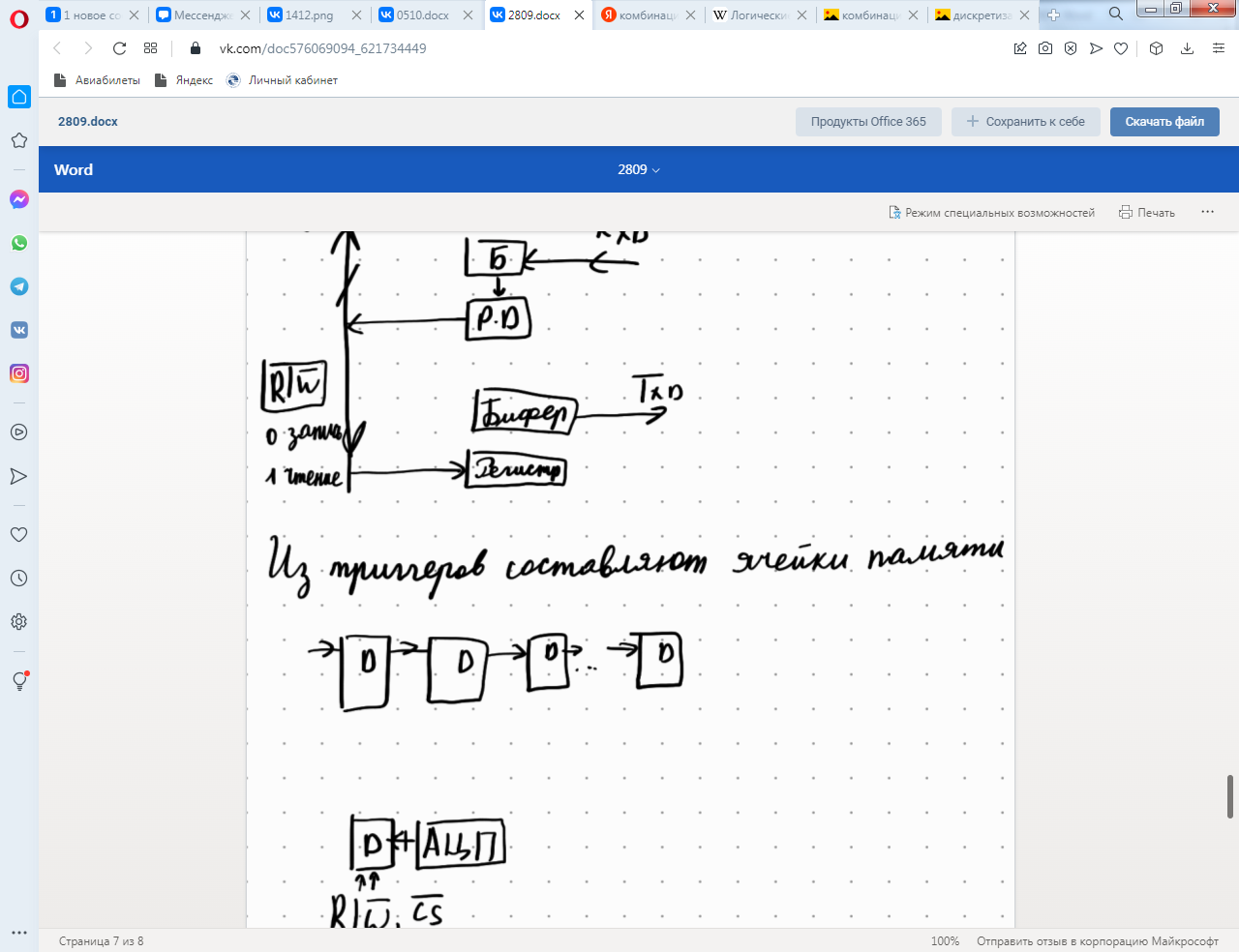
Из триггеров составляют ячейки памяти.
Лекция 05/10
Элемент с тремя состояниями
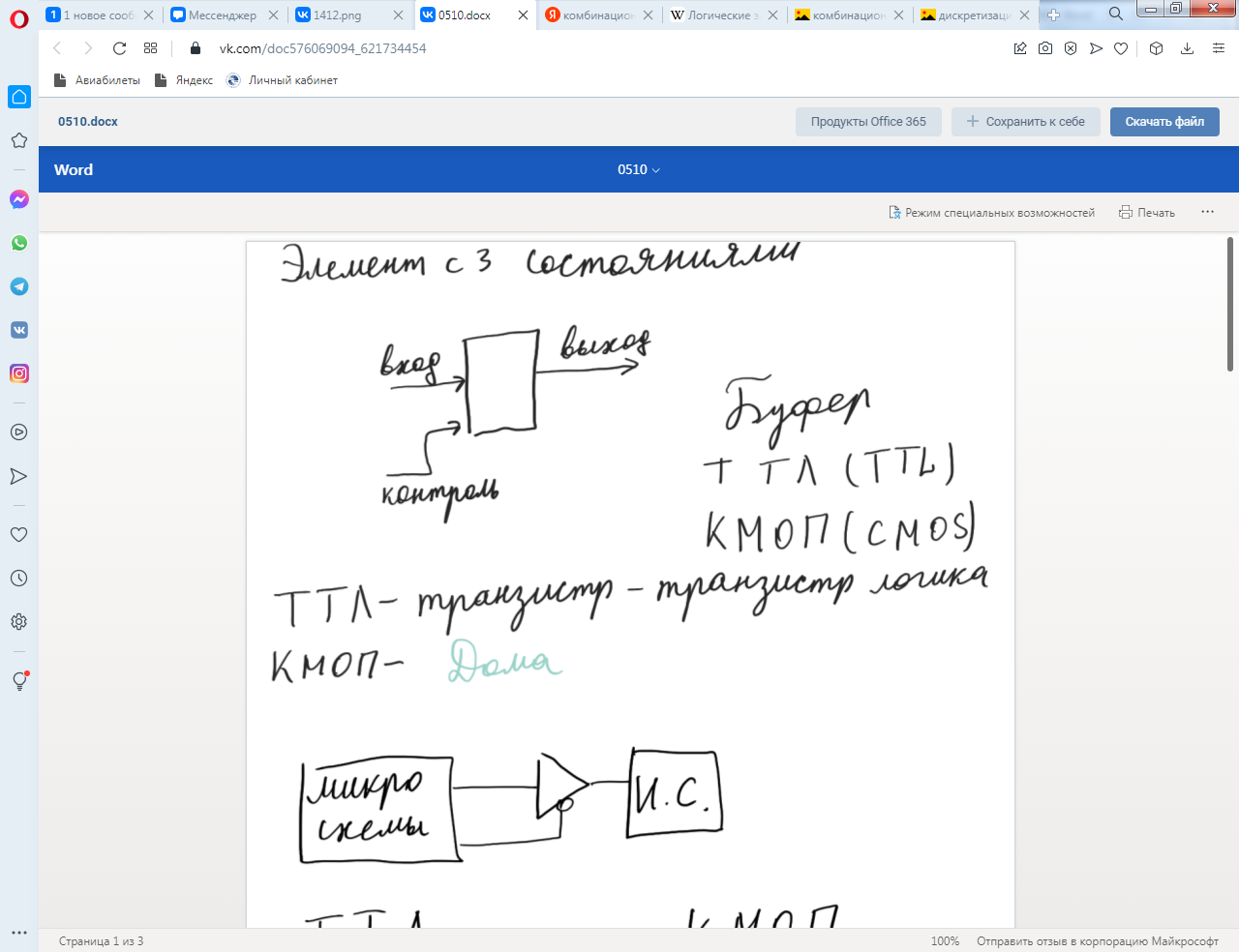
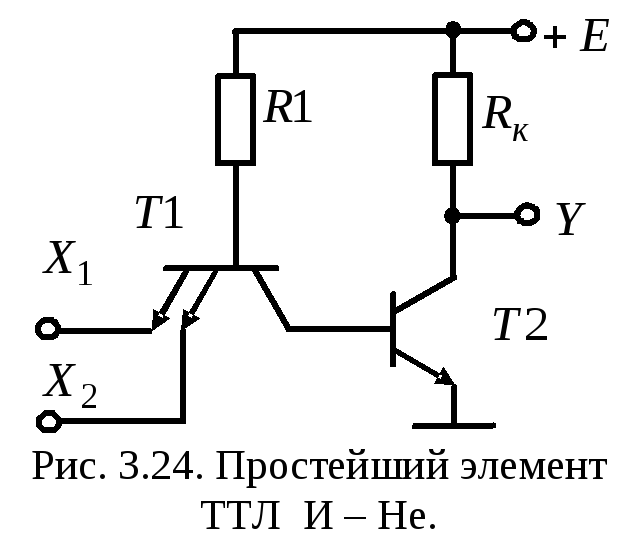
ТТЛ
Транзисторно-транзисторная логика (ТТЛ) — разновидность цифровых логических микросхем, построенных на основе биполярных транзисторов и резисторов. Название транзисторно- транзисторный возникло из-за того, что транзисторы используются как для выполнения логических функций (например, И, ИЛИ), так и для усиления выходного сигнала (в отличие от резисторно-транзисторной и диодно-транзисторной логики).
КМОМ
КМОП (комплементарная структура металл-оксид-полупроводник) — набор полупроводниковых технологий построения интегральных микросхем и соответствующая ей схемотехника микросхем.

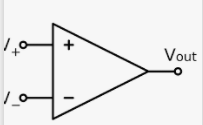
Компаратор
Компаратор — сравнивающее устройство - логический электронный прибор с двумя входами и одним выходом. Компаратор выдает высокое напряжение (логическая 1) в случае, если напряжение на первом (прямом) входе выше, чем на втором (инвертирующем) и низкое выходное напряжение (логический 0) если напряжение первого входа ниже вольтажа второго.
Лекция 14/12
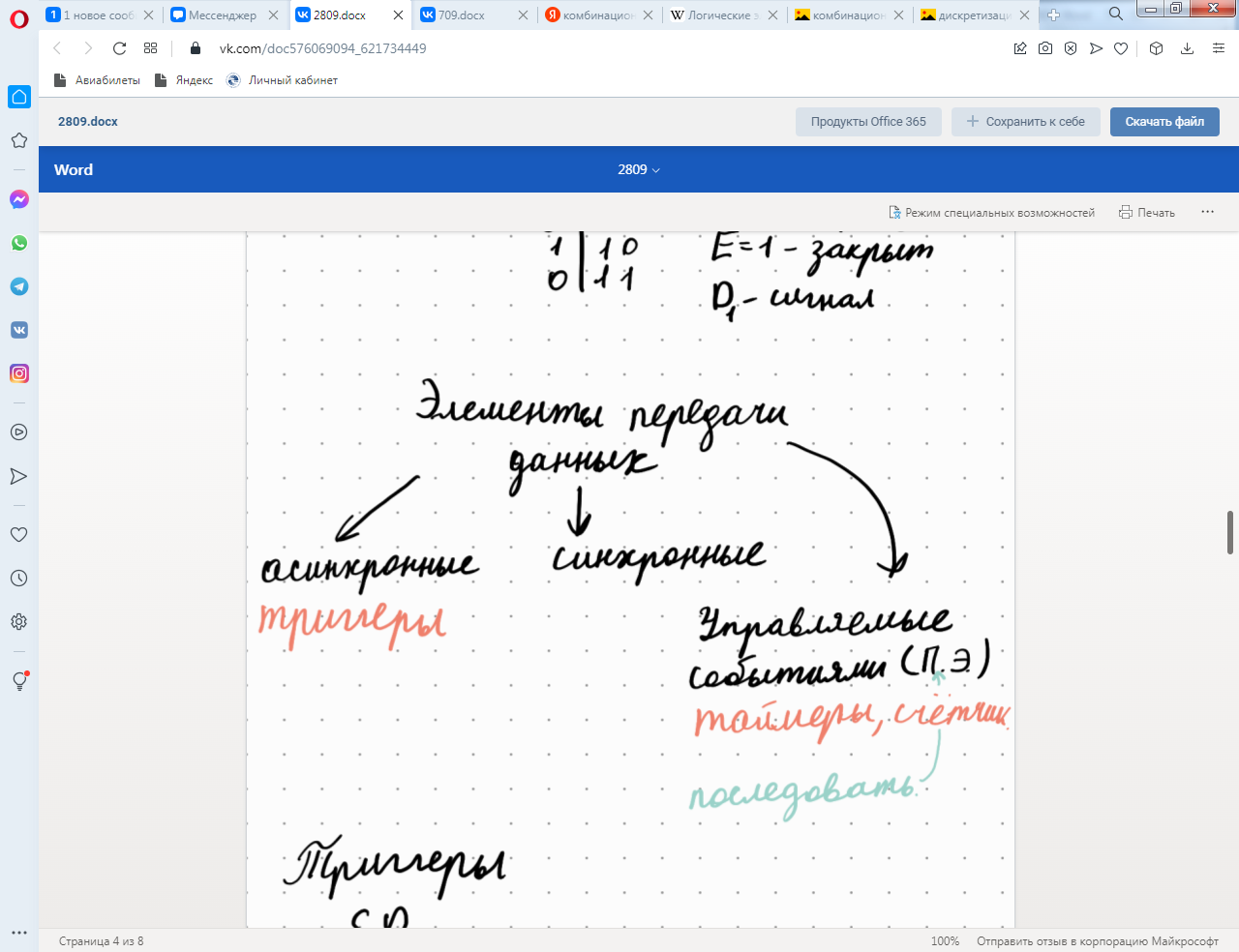
Интерфейсы передачи данных
UART - узел вычислительных устройств, предназначенный для организации связи с другими цифровыми устройствами. Преобразует передаваемые данные в последовательный вид так, чтобы было возможно передать их по одной физической цифровой линии другому аналогичному устройству. Метод преобразования хорошо стандартизован и широко применяется в компьютерной технике. Представляет собой логическую схему, с одной стороны подключённую к шине вычислительного устройства, а с другой имеющую два или более выводов для внешнего соединения.
UART автоматически вставляет в поток синхронизирующие метки, так называемые стартовый и стоповый биты. При приёме эти лишние биты удаляются из потока. Обычно стартовый и стоповый биты обрамляют один байт информации (8 бит), при этом младший информационный бит передаётся первым, сразу после стартового. Встречаются реализации UART, передающие по 5, 6, 7 или 9 информационных бит. Обрамлённые стартом и стопом биты являются минимальной посылкой. Некоторые реализации UART используют два стоповых бита при передаче для уменьшения вероятности рассинхронизации приёмника и передатчика при плотном трафике. Приёмник игнорирует второй стоповый бит, воспринимая его как короткую паузу на линии.
USART – это модуль последовательного ввода-вывода, который может использоваться для работы с периферийными устройствами, такими как терминалы или персональные компьютеры, модемы, микросхемами ЦАП, АЦП, последовательными EEPROM и т.д.
USART может работать в трех режимах:
асинхронный, полный дуплекс;
ведущий синхронный, полудуплекс;
ведомый синхронный, полудуплекс.
Модуль приемо-передатчика обеспечивает полнодуплексный обмен по последовательному каналу, при этом скорость передачи данных может варьироваться в довольно широких пределах. Длина посылки может составлять от 5 до 9 битов. В модуле присутствует схема контроля и формирования бита четности.
Модуль USART может обнаруживать следующие внештатные ситуации:
переполнение;
ошибка кадрирования;
неверный старт-бит.
Для уменьшения вероятности сбоев в модуле также реализована функция фильтрации помех. Для взаимодействия с программой в микроконтроллере, как правило, предусмотрены прерывания, запрос на генерацию которых формируется при наступлении следующих событий:
«передача завершена»;
«регистр данных передатчика пуст»;
«прием завершен».
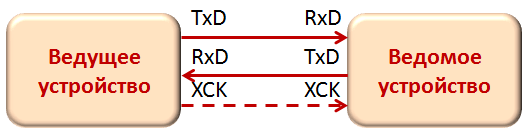
Интерфейс USART задействует 3 линии ввода-вывода:
TxD – передача данных;
RxD – прием данных;
XCK – тактовый сигнал (используется только в синхронном режиме).
Соединение двух устройств по интерфейсу USART осуществляется по следующей схеме:
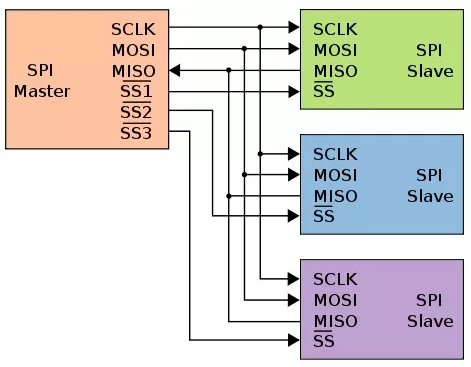
SPI - является аббревиатурой от “Serial Peripheral Bus”, что можно перевести как “шина для подключения периферийных устройств”. Отсюда вытекает ее главное назначение - связать одно главное устройство - Ведущее (Master) - с одним или несколькими Ведомыми (Slave). Ведущий в этом интерфейсе всегда один, только он руководит всем процессом и только он может формировать тактовые импульсы. Если в нашем случае Ведущим всегда является микроконтроллер (эту роль может исполнять и компьютер, но это другая история), то Ведомыми в подавляющем большинстве случаев являются именно периферические устройства. Датчики, дисплеи, микросхемы ЦАП и АЦП, RFID-ридеры, модули беспроводной связи, включая приемо-передатчики WiFi и Bluetooth, GPRS-адаптеры и так далее. Для связи контроллеров и/или компьютеров обычно не используется, но вообще это возможно и такой пример мы рассмотрим ниже. Особенно этот интерфейс востребован там, где требуется высокая скорость передачи данных и не менее высокая надежность. SPI именно такой, он самый быстрый из всех имеющихся в нашем распоряжении и самый “легкий” с точки зрения потреблемых ресурсов. Расплатой за это является использование большего количеств проводов, чем для других интерфесов. Здесь из требуется аж 3 штуки только непосредственно для передачи данных, не зря же его второе имя 3-ware. А именно:
MOSI - Master Output Slave Input (Ведущий передает, Ведомый принимает);
MISO - Master Input Slave Output (Ведущий принимает, Ведомый передает);
SCLK, иначе SCK - Serial Clock (тактовый сигнал).
Как мы видим, в данном протоколе есть признаки обоих известных нам интерфейсов, от UART достались две независимые шины на вход и на выход, от i2c - тактовый сигнал, для надежной синхронизации, так что можно уже примерно вообразить себе общий принцип работы SPI, но в нем есть и несколько специфических решений.
Три провода - это уже рекорд расточительства, но нам этого мало. Для корректной работы соединения потребуется еще несколько. Так как устройств к шине можно подключить одновременно несколько, но при этом они не обладают уникальными идентификаторами, как, например, в i2c, значит нужен какой-то способ отличать одно от другого. Ведущий должен точно знать, кому он отправляет данные и от кого их принимает. Для этого в протокол добавлен провод SS - Slave Select. У каждого Ведомого есть для этого отдельный пин, за состоянием которого он пристально наблюдает,падение в низкий уровень
Есть три способа подключения Ведущего и Ведомых.
Первый: если Ведомый один, одноименные пины просто соединяются напрямую. Такое даже рисовать не будем.
Второй: классический. Несколько Ведомых соединяются с Ведущим параллельно шинами MISO, MOSI и SCK, а SS ведет к каждому из них индивидуально.
Третий: цепочка, он же кольцо. SS один на всех, но данные передаются как бы сквозь устройства с одного на другое. Пока SS в низком уровне, данные растекаются по своим местам, после подъема уровня SS, устройства начинают с принятыми данными работать. Очевидный плюс: от контроллера требуется меньше пинов, но и жирный минус: далеко не все устройства поддерживают сквозную передачу данных.
Протокол передачи данных по интерфейсу SPI очень прост и потому имеет минимум вариантов - так называемых режимов. Они описываются всего двумя параметрами:
CPOL - исходный уровень сигнала синхронизации, низкий = 0 или высокий =1;
CPHA - фаза синхронизации, в какой момент импульса будет выполнена установка и считывание данных. По переднему фронту считывание, по заднему установка = 0, наоборот = 1. Разумеется, важно, чтобы все устройства в сети работали на одинаковых режимах SPI. В качестве краткого промежуточного итога отметим преимущества и недостатки интерфейса SPI в сравнении с i2c.
Преимущества: SPI максимально прост и потому максимально быстр. Скорость может достигать десятков мегагерц, что позволяет передавать большие объемы данных в потоковом режиме. Все шины однонаправлены, это упрощает задачу преобразования уровней. Программная реализация тоже максимально проста.
Недостатки: требует большее количество проводов и пинов, которое напрямую зависит от количества устройств, в i2c всего два провода на любое количество абонентов, i2c более стандартизирован, меньше риск столкнуться с разнотипными устройствами, работающими в разных режимах.
I2C является протоколом синхронной связи, это означает, что обмен данными происходит по общему для всех связанных устройств сигналу синхронизации. Генерацией сигнала занимается только единое главное устройство, оно же Ведущее, оно же Master по-английски. Устройство “говорит” и “дает слово” остальным, которые называются Ведомыми, по-английски Slave. Все ведомые устройства имеют уникальный номер, даже если такое устройство на всю сеть одно. Мастер номера не имеет, его и так все знают. Ведомые молчат, слушают, что говорит ведущий и откликаются только тогда, когда ведущий их об этом просит, называя их по имени (номеру), поэтому в сети всегда царит образцовый порядок. Обращение мастера начинается с падения уровня на шине данных SDA, что является стартовым сигналом для ведомых. Повышение уровня SDA при высоком тактовой сигнале является для них стоп-командой. Все, что происходит между этими событиями, называется “сообщение”, то есть передача данных.

Интерфейс i2c предназначен для довольно быстрой и надежной передачи на небольшие расстояния, обычно в пределах одного устройства. Как правильно, длина проводов ограничена несколькими метрами. Он занимает, своего рода, промежуточное положение между UART и SPI по параметрам скорости, надежности, расстоянию и использованию ресурсов.
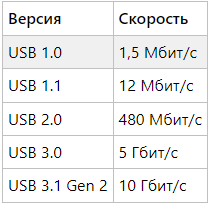
USB - интерфейс для подключения периферийных устройств. Изначально использовался в компьютерах, но в последствии получил широкое распространение и сейчас можно встретить в автомобилях, стереосистемах, телевизорах и других видах техники и сложных приборах. USB разшифровывается как Universal Serial Bus (универсальная последовательная шина).
CAN является синхронной шиной с типом доступа Collision Resolving (CR, разрешение коллизии), который, в отличие от Collision Detect (CD, обнаружение коллизии) сетей (Ethernet), детерминировано (приоритетно) обеспечивает доступ на передачу сообщения, что особо ценно для промышленных сетей управления (fieldbus). Передача ведётся кадрами. Полезная информация в кадре состоит из идентификатора длиной 11 бит (стандартный формат) или 29 бит (расширенный формат, надмножество предыдущего) и поля данных длиной от 0 до 8 байт. Идентификатор говорит о содержимом пакета и служит для определения приоритета при попытке одновременной передачи несколькими сетевыми узлами.