

Расчет характеристики демпфирующего элемента подвески
Введение в подвеску упругого элемента приводит к возникновению колебаний подрессоренного корпуса ГМ, амплитуда которых при движении по неровной дороге может стать настолько большой, что возникнет «пробой» подвески. Для снижения амплитуд колебаний применяют демпфирующие элементы, принцип работы которых заключается в преобразовании кинетической энергии в тепловую. Эффективность работы демпфирующих элементов оценивается степенью затухания колебаний ν, которая для современных ГМ находится в диапазоне от 10 до 17 [1].
На первом этапе характеристику
демпфирующего элемента рассчитывают
по упрощенной методике, полагая подвеску
линейной [1]. Сила R,
возникающая в демпфирующем элементе,
приведенная к оси ОК, линейно зависит
от скорости вертикального перемещения
ОК
 и может быть найдена по формуле 15.
и может быть найдена по формуле 15.
 ,
1515\* MERGEFORMAT ()
,
1515\* MERGEFORMAT ()
где μ — приведенный к оси ОК коэффициент сопротивления демпфирующего элемента подвески, Нс/м;
— скорость вертикального перемещения ОК, м/с.
Для обеспечения удовлетворительных показателей плавности хода целесообразно иметь разные значения коэффициентов сопротивления μ, однако на первом этапе расчета используют среднее значение μср, определяемое полусуммой коэффициентов сопротивления прямого и обратного ходов подвески по формуле 16
 , 1616\* MERGEFORMAT ()
, 1616\* MERGEFORMAT ()
где μпр — приведенный к оси ОК коэффициент сопротивления демпфирующего элемента на прямом ходе подвески, Н·с/м;
μобр — приведенный к оси ОК коэффициент сопротивления демпфирующего элемента на обратном ходе подвески, Н·с/м.
Средний коэффициент сопротивления демпфирующего элемента подвески вычисляют по формуле 17.
 , 1717\* MERGEFORMAT ()
, 1717\* MERGEFORMAT ()
где cʹ — жесткость эквивалентной линейной подвески, имеющей такую же удельную потенциальную энергию, как и проектируемая нелинейная, Н/м. Определяется по формуле 18;
lj — расстояние от центра масс ГМ до осей опорных катков, на подвесках которых установлены демпфирующие элементы, м;
k — число демпфирующих элементов по одному борту ГМ.
 ; 1818\* MERGEFORMAT ()
; 1818\* MERGEFORMAT ()
Таким образом:


Для определения приведенного коэффициента сопротивления демпфирующего элемента на прямом ходе подвески необходимо вычислить его предельное значение на обратном ходе подвески. Для этого рассматриваются два значения: выбираемое на основании опыта конструирования μоб.к = μср/0,85 и рассчитываемое как предельное по условию «независания» ОК по формуле 19.
 .
1919\* MERGEFORMAT ()
.
1919\* MERGEFORMAT ()
Под «зависанием» ОК понимают ситуацию, когда ОК после удара о неровность не успевает вернуться до уровня статического хода подвески до наезда на следующую неровность.
Период продольно-угловых колебаний Tφ выражают через формулу 1, тогда


Значение максимального коэффициента сопротивления демпфирующего элемента на обратном ходе следует выбирать то, что получилось по условию «независания» ОК, так как оно дает меньшее значение [1], а сопротивление демпфера на прямом ходе, вычисленное по формуле 16:

Эффективное гашение демпфирующим элементом продольно-угловых колебаний приводит к росту передаваемых на подрессоренный корпус ГМ высокочастотных вертикальных ускорений. В связи с этим на прямом ходе подвески силу сопротивления демпфирующего элемента ограничивают. Ее предельное значение определяется уровнем допустимых высокочастотных ускорений – так называемых ускорений «тряски». Их среднеквадратическое значение не должно превышать 0,5g для обеспечения нормального самочувствия экипажа. Превышение этого значения приведет к быстрому утомлению и невозможности выполнять задачи. Предельное значение силы сопротивления демпфирующего элемента, приведенное к оси ОК, определяют по формуле 20.
 ,
2020\* MERGEFORMAT ()
,
2020\* MERGEFORMAT ()
где hн — высота периодической высокочастотной неровности, м;
nа — число демпфирующих элементов по одному борту ГМ.
Таким образом:

Характеристика демпфирующего элемента представлена на рисунке 3.
Полученные значения подлежат уточнению. Наилучшим способом для этого является проведение вычислительного эксперимента путем математического моделирования движения БГМ по неровностям.
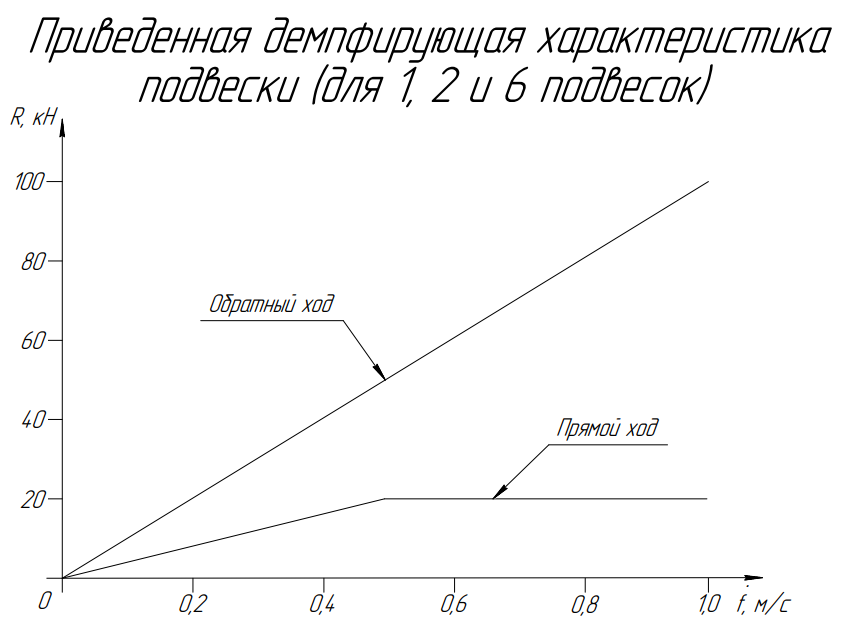
R — сила сопротивления амортизатора;
 — вертикальная
скорость опорного катка;
— вертикальная
скорость опорного катка;
Рисунок 3 — Начальный вид демпфирующей характеристики