

6. Принцип действия исполнительных механизмов
Цель работы: изучить принцип действия исполнительных механизмов
Оборудование и материалы: тренажерная установка ректификации
Ход работы:
Электрические исполнительные механизмы - это устройства, предназначенные для перемещения рабочего органа в соответствии с сигналами, которые поступают от регулирующего или управляющего устройства.
|
|

Общий принцип действия исполнительных механизмов
Обычно исполнительные механизмы состоят из трех основных частей: привод, прибор для управления приводом и регулирующий орган — задвижки. Привод обеспечивает изменение положения задвижки, а задвижка корректирует величину переменной процесса.
За счет подвода энергии извне исполнительный механизм развивает усилие и мощность, достаточные для перемещения регулирующего органа в положение, соответствующее командному сигналу. Например, исполнительный механизм может использоваться, чтобы изменить степень открытия клапана для увеличения или уменьшения загрузки, или изменить положение заслонки или жалюзи.
Виды исполнительных механизмов
Существуют разные виды исполнительных механизмов, которые, в свою очередь, имеют подвиды. Их конструкция и принцип действия отличаются друг от друга. В зависимости от вида энергии, используемой для создания перестановочного усилия, исполнительные механизмы разделяют на пневматические, гидравлические и электрические.
Тип исполнительного механизма, который используется на конкретном производстве, зависит от многих факторов, включая особенности технологического процесса, действие, которое должно быть выполнено и требуемую скорость реагирования.
|
|
Пневматические исполнительные механизмы: а) поршневой двустороннего действия; б) мембранный; I и II – полости цилиндра; 1 – штуцер; 2 – канал для подачи воздуха; 3 – цилиндр; 4 – шток; 5 – поршень; 6 – отверстие для подачи воздуха; 7 – резиновая мембрана; 8 – крышки; 9 – диск; 10 – пружина; 11 – втулка; 12 – гайка; 13 – шток привода; 14 – шкала положения регулирующего органа |
|


Вывод: В данной работе мы изучили принцип действия исполнительных механизмов
7-8. Классификации автоматических регуляторов.
Принцип действия автоматических регуляторов
Цель работы: изучить принцип действия автоматических регуляторов
Оборудование и материалы: тренажерная установка ректификации
Ход работы:
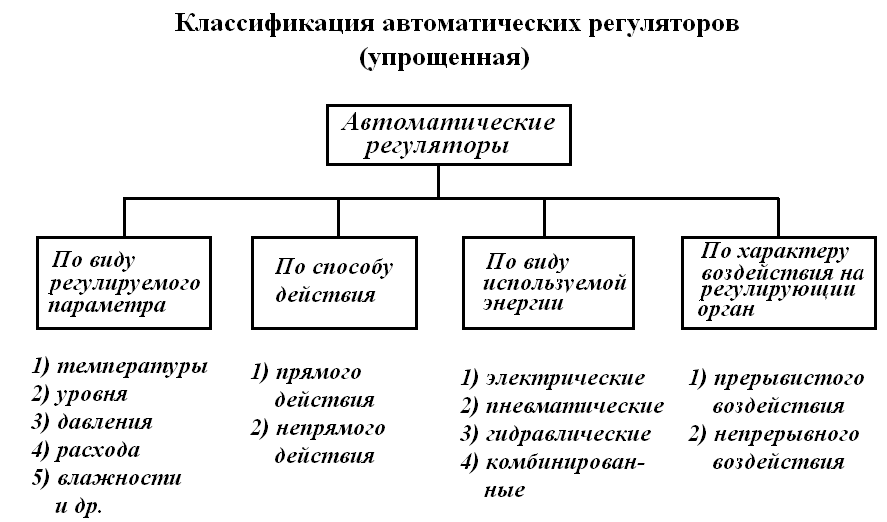
Автоматические регуляторы классифицируются по назначению, принципу действия, конструктивным особенностям, виду используемой энергии, характеру изменения регулирующего воздействия и т.п.
По принципу действия они подразделяются на регуляторы прямого и непрямого действия. Регуляторы прямого действия не используют внешнюю энергию для процессов управления, а используют энергию самого объекта управления (регулируемой среды). Примером таких регуляторов являются регуляторы давления. В автоматических регуляторах непрямого действия для его работы требуется внешний источник энергии.
По роду действия регуляторы делятся на непрерывные и дискретные.
По виду используемой энергии они подразделяются на электрические (электронные), пневматические, гидравлические, механические и комбинированные. Выбор регулятора по виду используемой энергии определяется характером объекта регулирования и особенностями автоматической системы.
По закону регулирования они делятся на двух- и трехпозиционные регуляторы, регуляторы с непрерывным управляющим воздействием (интегральные, пропорциональны, пропорционально-дифференциальные, пропорционально-интегральные, и пропорционально - интегрально - дифференциальные регуляторы - сокращенно И, П, ПД, ПИ и ПИД - регуляторы), регуляторы с переменной структурой, адаптивные) и оптимальные регуляторы.
По назначению регуляторы подразделяются на специализированные (например, регуляторы уровня, давления, температуры и т.д.) и универсальные с нормированными входными и выходными сигналами и пригодные для управления различными параметрами.
По виду выполняемых функций регуляторы подразделяются на регуляторы автоматической стабилизации, программные, корректирующие, регуляторы соотношения параметров и другие.
Пропорциональные регуляторы (П-регуляторы)
В П-регуляторах перемещения регулирующего органа пропорционально отклонению регулируемой величины от заданного значения. Эти регуляторы также называются статическими, потому что в процессе регулирования они все время стремятся «догнать» отклонившуюся от заданного значения регулируемую величину и остановить ее, т.е. прекратить отклонение. Для П-регуляторов диапазон регулируемой величины, в пределах которого происходит перемещение регулирующего органа из одного крайнего положения в другое, называют пределом пропорциональности. Чем больше предел пропорциональности регулятора, тем меньше его чувствительность и наоборот.
Интегральные (астатические) регуляторы (И-регуляторы)
И-регуляторы характеризуются перемещением регулирующего органа пропорционально интегралу отклонения регулируемой величины от заданного значения. Иными словами, регулирующий орган перемещается со скоростью, пропорциональной отклонению регулируемой величины.
Пропорционально-интегральные регуляторы (ПИ-регуляторы)
Эти регуляторы также называют изодромными регуляторами или регуляторами с упругой обратной связью. ПИ-регуляторы представляют собой сочетание пропорционального и интегрального регуляторов.
В ПИ-регуляторах регулирующий орган при наличии отклонения регулируемой величины сначала перемещается быстро (пропорционально отклонению), а затем продолжает свое перемещение в результате интегрального воздействия (обычно медленнее). Пропорциональная часть регулятора стремится как бы «догнать» и остановить изменение регулируемой величины. По достижении равновесия пропорциональная составляющая прекращает свое влияние на регулирующий орган, а действие интегральной составляющей будет продолжаться. В результате этого воздействия регулирующий орган займет такое положение, при котором статическая ошибка будет ликвидирована.
Пропорционально-дифференциальные регуляторы (ПД-регуляторы)
ПД-регуляторы обеспечивают перемещение регулирующего органа как пропорционально отклонению регулируемой величины, так и пропорционально скорости отклонения. Подобные регуляторы еще при переходе регулируемой величины к заданному значению осуществляют действия, препятствующие переходу величины за пределы заданного значения.
В начальный момент рассогласования скорость отклонения регулируемой величины проявляется более значительно, чем изменение величины регулирующего параметра. Поэтому в закон регулирования ПД-регуляторов вводят предваряющее воздействие, что эффективно сказывается на качестве регулирования.
Поскольку скорость изменения регулируемой величины есть первая производная её изменения во времени, то такие регуляторы называют регуляторами по первой производной. Они применяются при регулировании быстропротекающих процессов.
Пропорционально – интегрально - дифференциальные регуляторы (ПИД-регуляторы)
Эти регуляторы известны также под названием изодромные с предварением. В ПИД-регуляторах регулирующий орган перемещается пропорционально отклонению, интегралу и скорости отклонения регулируемой величины. Работу этих регуляторов можно рассматривать как совместное действие статического и астатического регуляторов с учетом скорости изменения регулируемой величины.
ПИД-регуляторы сочетают свойства всех рассмотренных выше регуляторов. Они удовлетворяют наиболее трудным условиям и требованиям регулирования.
Вывод: В данной работе мы изучили классификацию и принцип действия автоматических регуляторов
9-10. Назначение и принцип работы приборов для измерения